P8000控制箱.pdf - 第4页
3. 驱动器上有错误代码的编号. 检查 指示灯 说明 处理方法 OC 过电流 14 检查电机设备,连线状况。确定 启动器。 过热OH 15 检查驱动器的散热条件. 19 检查 驱动器 的散热条件 . 编码器ST 20 1 .检查编码器与驱动器的连线 2. 检查编码器的共电电压. 21 22 通信错CE 31 1. 检查光缆 2. 检查驱动器地址设定 32 3. 调整光穿光传送的发光能 4. 检查驱动器的光缆。 33 97 过载(OL 1…
OPTICAL MODULE
OUTPUT(输出型):光信号-->电信号
1) 光导纤维的信号被送到光模板。
2) 接着光信号被转换成电信号。
3) 光模板接收这个信号并且整合成矩形波式或波浪性信号。
4) 然后经过一个串/并联的转换器转换串联传送变成并联传送。
5)信号与光模板连在一起,通过光模板与进入其他光模板作为输出
6)这个过程持续到所有的信号被登录
INPUT (输入):电信号-->光信号
1) 信号经过一串/并联转换器转换串联传输变成并联传输。
2) 信号进入光模板的地址并且进入其他的光模板。
3) 信号通过电光转换器把电信号转换成光信号。
4) 最后所有的光信号将输入到SC-CARD.
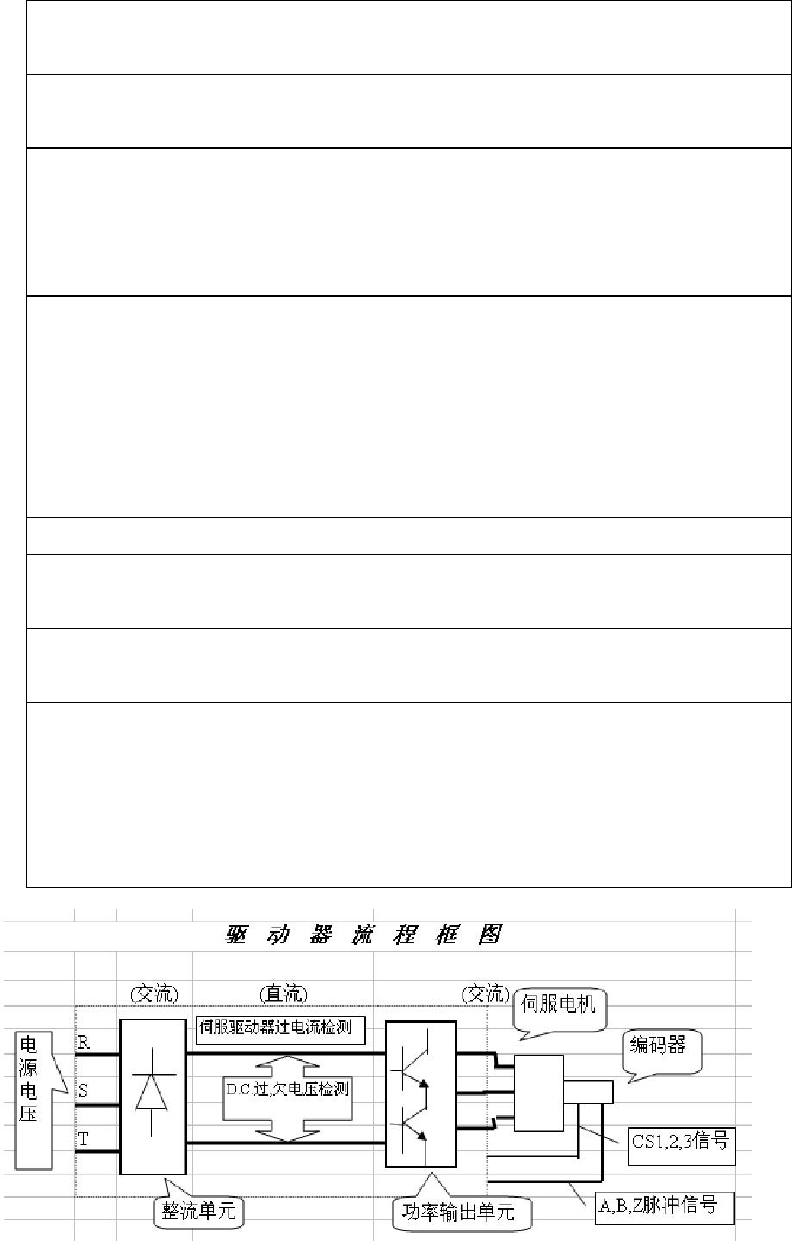
B.伺伏马达驱动器的介绍.
驱动器在整个控制环节中,正好处于主控制箱(MAIN CONTROLLER)-->驱动
器(DRIVER)-->马达(MOTOR)的中间换节。他的主要功能是接收来自主控制
箱(NC CARD)的信号,然后将信号进行处理再转移至马达以及和马达有关的
感应器(SENSOR),并且将马达的工作情况反馈至主控制箱(MAIN
CONTROLLER)。
1.驱动器上的连线。
机器上的驱动器都有一根来源于PROWR SOURCE独立的电源线AC200V.
每台驱动器有一根独立的AC200V输出电源线,给马达。
有一根AC200V电源线来源于PROWR SOURCE ,每个驱动器相互串联。
如其中一个驱动器发生此电线脱落或断裂,此问题驱动器前的驱动器
会出现错误号码13。
有一根SV信号线,是连接SOVER MOTOR开关.如此线受损或脱落只会造成
此驱动器报警.
2.驱动器在整个控制环节中,正好处在控制箱到马达的中间环节。
主要功能是接收来自NC CARD的信号,然后将信号处理传输给马达和马达
相应的感应器。并且把马达的工作情况反馈给主控箱。
3.驱动器上有错误代码的编号.
检查 指示灯 说明 处理方法
OC过电流
14
检查电机设备,连线状况。确定
启动器。
过热OH
15
检查驱动器的散热条件.
19
检查 驱动器 的散热条件.
编码器ST
20
1
.检查编码器与驱动器的连线
2.检查编码器的共电电压.
21
22
通信错CE
31
1.检查光缆
2.检查驱动器地址设定
32
3.调整光穿光传送的发光能
4.检查驱动器的光缆。
33
97
过载(OL
16
1
.检查电机是否有过度的摩擦
超速保护
24
检查是否有超速指令。
OS 检查是否因增益调整不确当
超电压OV
12
检查电助器是否脱开
延长减速时间,减少负载惯性
电压低LV
13
检查共电电压是否处在标准范围
以内。
注意是否出现因接通电源时冲击电
流引起的电力不足或电压不足,还
应注意电源是否有一相短路。

C:步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向
转动一个固定的角度(及步进角)。
可以通过控制脉冲个数来控制角位移量
从而达到准确定位的目的;同时可以通过控制脉冲频率
来控制电机转动的速度和加速度,从而达到调速的目的
一般步进电机的精度为步进角的3-5%,且不累积。
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;
频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)
的增大而相电流减小,从而导致力矩下降。