S321 规格.pdf.pdf - 第12页
2-6 区分 项 目 规 格 备 注 Clamping 方法 T aper clamp + Ball Clamping ball 的数 3 个 Nozzle holder Cushion 不 Nozzle 的 Cu shion 设置 识别方法 Flying Vision (CCD Camera) S tage Vision (CCD Camera) 安装数码照明装置 2.6. PCB 规格 2.6.1. PCB 的规格,弯曲允许误差 表…
2-5
2.4. XY-轴的规格
表
2-1. XY-
轴的规格
区
分
规
格
备
注
机械装置
X轴: AC Servo + Belt + Ball Screw
Y轴: AC Servo + Ball Screw (Twin)
750 W
1000 W * 2
减速比 X轴 1:1 , Y轴 1:1
反复精度
± 0.01 mm
X轴: 3.2 µm/pulse
移动精度
Y轴: 3.0 µm/pulse
X-轴的范围
758 mm
752 mm
748 mm
H/W Limit
S/W Limit
作业范围
Y-轴的范围
995 mm
989 mm
985 mm
H/W Limit
S/W Limit
作业范围
加减速模式
1.8 m/sec, 3G
1.8 m/sec, 2.5G
X轴
Y轴
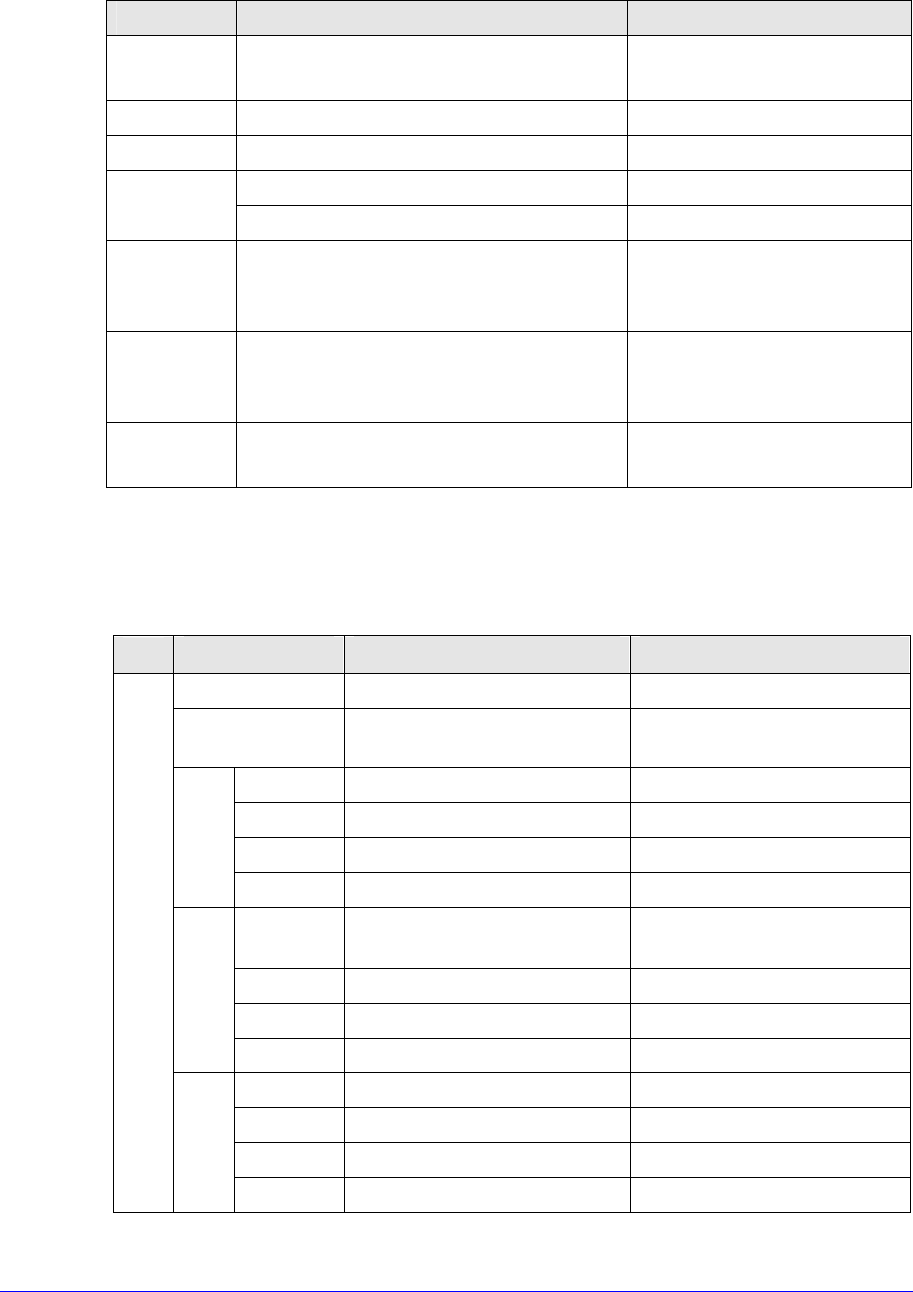
2.5. Head的规格
表
2-2. Head
的规格
区分
项 目 规 格 备 注
吸嘴的数量
6 Nozzle
4 Nozzle 选项
Head 的间距
30 mm
8mm, 12mm, 16mm Feeder
吸着可能的程度
机械装置
AC Servo motor + Belt & LM Motor: 30W
动作范围
96 mm Stopper to stopper
移动精度
0.005 mm/pulse
基于示教
Z轴
反复精度
± 0.01 mm
最佳条件
机械装置
Micro stepping motor +
Belt & Pulley
Head 1/2, 3/4, 5/6 Pair
动作范围
Unlimited°
移动精度
0.014 °/pulse
基于示教
R轴
反复精度
± 0.03 °
最佳条件
机械装置
AC servo motor + Belt & Cam Motor : 50 W
动作范围 44
˚
移动精度 0.018
˚
/pulse
Head
Swing Mirror
反复精度 ±0.02
˚
2-6
区分
项 目 规 格 备 注
Clamping
方法
Taper clamp + Ball
Clamping
ball 的数
3 个
Nozzle holder
Cushion
不 Nozzle的Cushion 设置
识别方法
Flying Vision (CCD Camera)
Stage Vision (CCD Camera)
安装数码照明装置
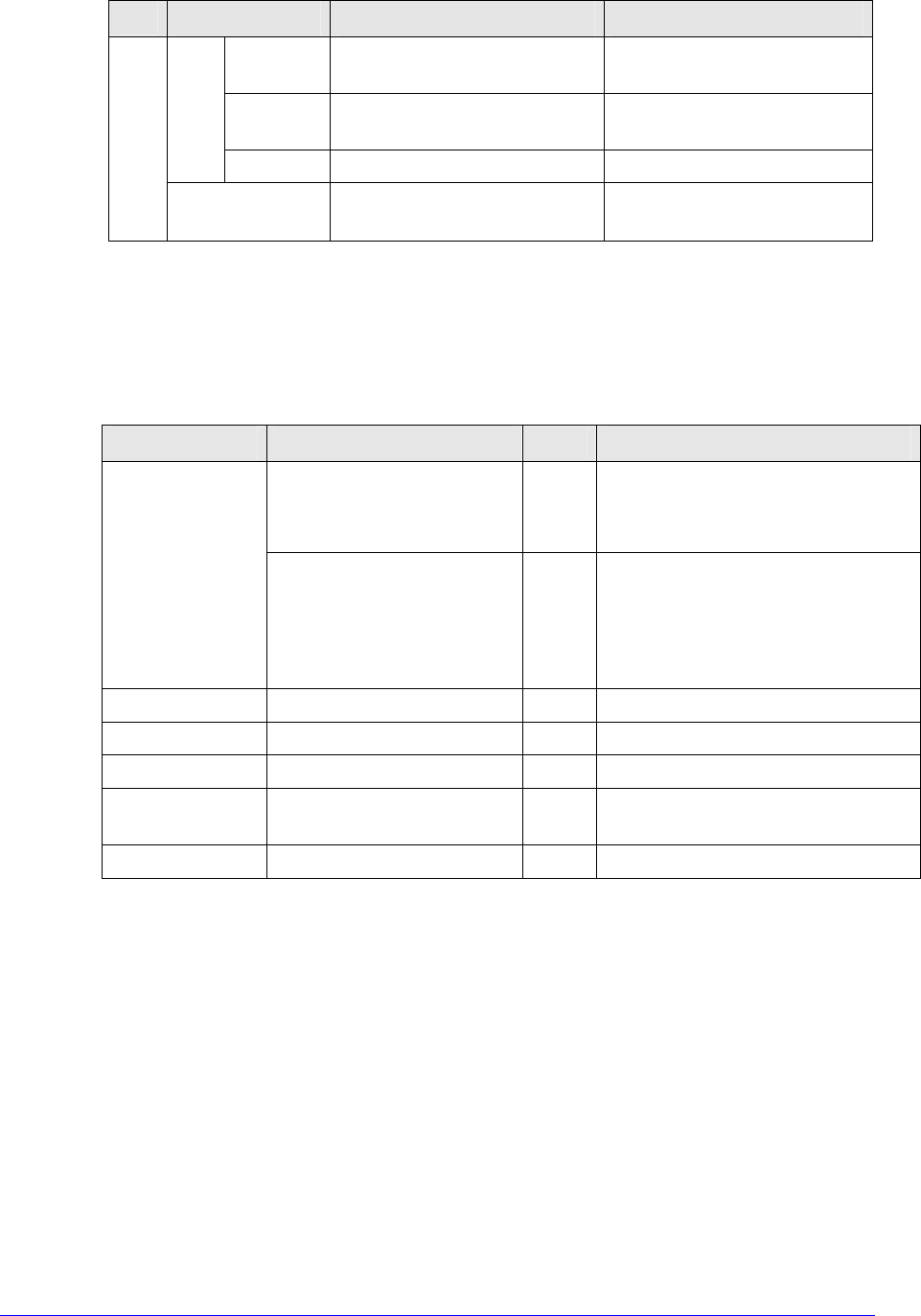
2.6. PCB 规格
2.6.1. PCB的规格,弯曲允许误差
表
2-3. PCB
规格
区分 规 格 SM321 备 注
(L)460mm x (W)400mm
O
最大盘式尺寸:(L)316x(W)136 (2 梅)
1/20 段 Tray Feeder 应用时
不可使用 后面 docking cart
PCB 的最大尺寸
(L)510mm x (W)460mm
O
1/20 段 NSTray Feeder(JEDEC 1 梅)
应用时
Max. Tray Size: (L)316x(W)136 (2 梅),
Tray Feeder 适用时, docking cart(对接
车) 及 12 段 Tray Feeder 不可使用
PCB 的最小尺寸 (L)50mm x (W)40mm
O
(L)50mm x (W)30mm : 选项
厚度
0.38 mm ~ 4.2 mm
移送可能 PCB
3.0 Kg
允许弯曲度公差 (上):0.5mm, (下):1.5mm
Max: L460 X W400 X 4.2t
Max: L510 X W460 X 4.2t
部件上下对应 (上):15mm, (下):25mm
根据支架的位置而可能有所差异
O: 標準, : Factory Option, X:
不
適用 可
2-7
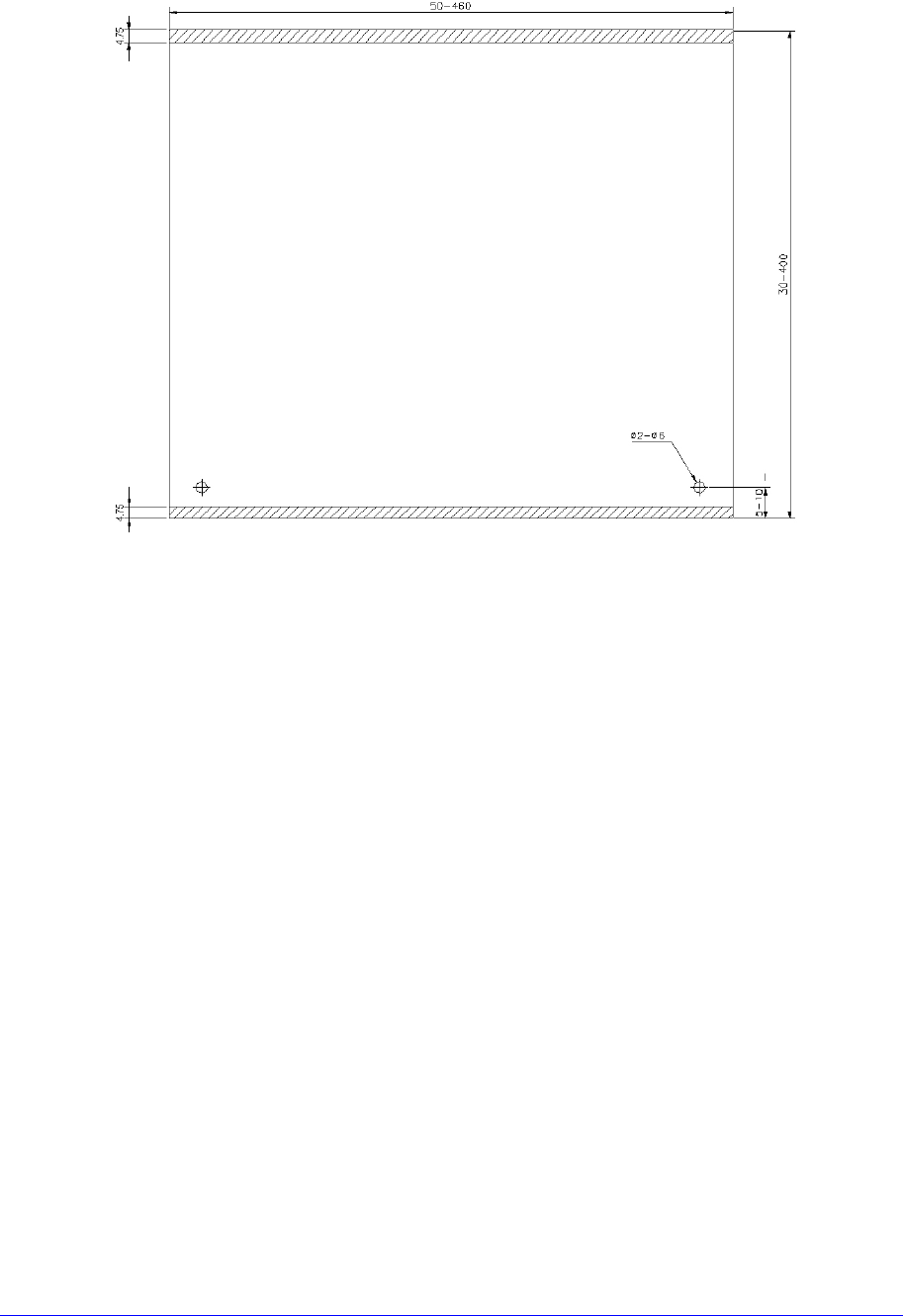
2.6.2. PCB的条件
图
2-1. PCB
的限制条件
在夹住 PCB 的两个边缘有 4.75mm 宽的剩余空间。PCB 的上面剩余空间为
17mm,下面的空间为 14.5mm。PCB 用 135mm 高的后退顶杆(Back Up Pin)来
支撑。
PCB 固定方法
基本上都用定位销来固定 PCB。还有一种是从 PCB 的 两个侧面夹住的“外壳
固定方法”,它只是当选项来使用。有时候同时采用以上两种方法(复合固定方
法)。
PCB 的移送方向和位置固定销的位置
PCB 移送方向可以是从左到右,也可以是从右到左。这个移送方向最好不要由
使用者自己确定,希望向我公司请求协助。
位置固定销的位置可根据 PCB 位置的变化,由使用者任意指定。
设备从工厂出库时,对 PCB 的移送方向和位置固定销的位置,根据使用者的要
求条件先进行调整。