Program.x200.pdf - 第158页
2.4 2.4 2.4 2.4 2.4 “ Control Data( Control Data( Control Data( Control Data( Control Data( ࠋᭅ ࠋᭅ ࠋᭅ ࠋᭅ ࠋᭅ ) ) ) ) ) ” Tab Tab Tab Tab Tab ᇎᑩѣܽ䚽ⱙܘӋᔷ⢋ “ Cylindrical( ᷆ᔷ ) ȡ Square( ᮎᔷ ) ȡ Deform(Simple)( ᓗᔷ ( प…
*7 Lead width detn(Le*7 Lead width detn(Le
*7 Lead width detn(Le*7 Lead width detn(Le
*7 Lead width detn(Le
adad
adad
ad
ᆒ߹ᅯᆒ߹ᅯ
ᆒ߹ᅯᆒ߹ᅯ
ᆒ߹ᅯ
))
))
)
᭜ᴁḛ䕨ܺᭅȢ
Lead width tol(LeLead width tol(Le
Lead width tol(LeLead width tol(Le
Lead width tol(Le
adad
adad
ad
ᆒ䆍ৄؑᆒ䆍ৄؑ
ᆒ䆍ৄؑᆒ䆍ৄؑ
ᆒ䆍ৄؑ
)[mm])[mm]
)[mm])[mm]
)[mm]
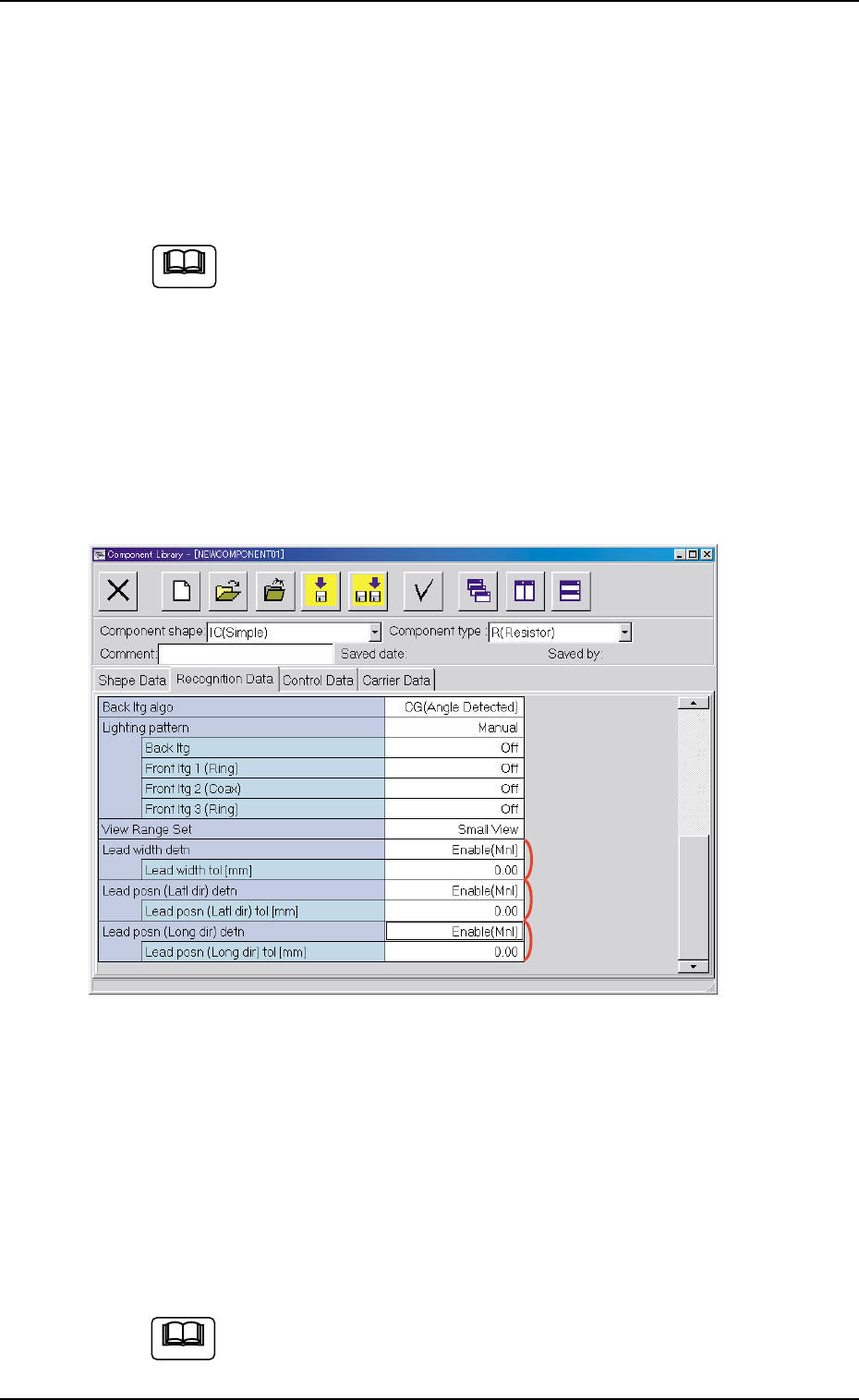
䆓ᅯ Lead ᆒ߹ᅯЏ “Enable(Mnl)(ᠠࡽ)” ᯋͼ᭜ᴁḛ䕨ܺ
ᭅȢ
ܘӋᔷ⢋Џ Connector(Simple)ᰄ Connector
(Complex)ᯋͼ᮵⊪ᰓ⼏ Lead ᆒ߹ᅯȢ
*8*8
*8*8
*8
Lead posn(Latl dir)detn(LeadLead posn(Latl dir)detn(Lead
Lead posn(Latl dir)detn(LeadLead posn(Latl dir)detn(Lead
Lead posn(Latl dir)detn(Lead
Ԣ㕃Ԣ㕃
Ԣ㕃Ԣ㕃
Ԣ㕃
((
((
(
ᆒᆒ
ᆒᆒ
ᆒ
))
))
)
߹ᅯ߹ᅯ
߹ᅯ߹ᅯ
߹ᅯ
))
))
)
᭜ᴁḛ䕨ܺᭅȢ
Lead posn(Latl dir)tol(LeadLead posn(Latl dir)tol(Lead
Lead posn(Latl dir)tol(LeadLead posn(Latl dir)tol(Lead
Lead posn(Latl dir)tol(Lead
Ԣ㕃Ԣ㕃
Ԣ㕃Ԣ㕃
Ԣ㕃
((
((
(
ᆒᆒ
ᆒᆒ
ᆒ
))
))
)
䆍ৄؑ䆍ৄؑ
䆍ৄؑ䆍ৄؑ
䆍ৄؑ
)[mm])[mm]
)[mm])[mm]
)[mm]
䆓ᅯ Lead posn(Latl dir)detn Ԣ㕃߹ᅯЏ “Enable(Mnl)
( ᠠࡽ) ” ᯋͼ᭜ᴁḛ䕨ܺᭅȢ
*9*9
*9*9
*9
Lead posn(Long dir)detn(LeadLead posn(Long dir)detn(Lead
Lead posn(Long dir)detn(LeadLead posn(Long dir)detn(Lead
Lead posn(Long dir)detn(Lead
Ԣ㕃Ԣ㕃
Ԣ㕃Ԣ㕃
Ԣ㕃
((
((
(
䭔䭔
䭔䭔
䭔
))
))
)
߹ᅯ߹ᅯ
߹ᅯ߹ᅯ
߹ᅯ
))
))
)
᭜ᴁḛ䕨ܺᭅȢ
Lead posn(Long dir)tol(LeadLead posn(Long dir)tol(Lead
Lead posn(Long dir)tol(LeadLead posn(Long dir)tol(Lead
Lead posn(Long dir)tol(Lead
Ԣ㕃Ԣ㕃
Ԣ㕃Ԣ㕃
Ԣ㕃
((
((
(
䭔䭔
䭔䭔
䭔
))
))
)
䆍ৄؑ䆍ৄؑ
䆍ৄؑ䆍ৄؑ
䆍ৄؑ
)[mm])[mm]
)[mm])[mm]
)[mm]
䆓ᅯ Lead posn(Long dir)Џ “Enable(Mnl)(ᠠࡽ)” ᯋͼ
᭜ᴁḛ䕨ܺᭅȢ
ܘӋᔷ⢋Џ Connector(Simple)ȡConnector(Complex)ȡ
Other Leaded(Simple)ȡOther Leaded(Complex)ȡᯋͼ
᮵⊪ᰓ⼏ Lead posn(Long dir)detnȢ
0107-001 3-32
Fig.3C16Fig.3C16
Fig.3C16Fig.3C16
Fig.3C16 “
Recognition DataRecognition Data
Recognition DataRecognition Data
Recognition Data”
TabTab
TabTab
Tab
乊䴷乊䴷
乊䴷乊䴷
乊䴷
(IC(Simple))(IC(Simple))
(IC(Simple))(IC(Simple))
(IC(Simple))
ՠՠ
ՠՠ
ՠ
Note
Note
2.32.3
2.32.3
2.3 “
Recognition Data(Recognition Data(
Recognition Data(Recognition Data(
Recognition Data(
䆛ࠀᭅ䆛ࠀᭅ
䆛ࠀᭅ䆛ࠀᭅ
䆛ࠀᭅ
))
))
) ”
TabTab
TabTab
Tab
*9*9
*9*9
*9
*8*8
*8*8
*8
*7*7
*7*7
*7
2.42.4
2.42.4
2.4 “
Control Data(Control Data(
Control Data(Control Data(
Control Data(
ࠋᭅࠋᭅ
ࠋᭅࠋᭅ
ࠋᭅ
))
))
)”
TabTab
TabTab
Tab
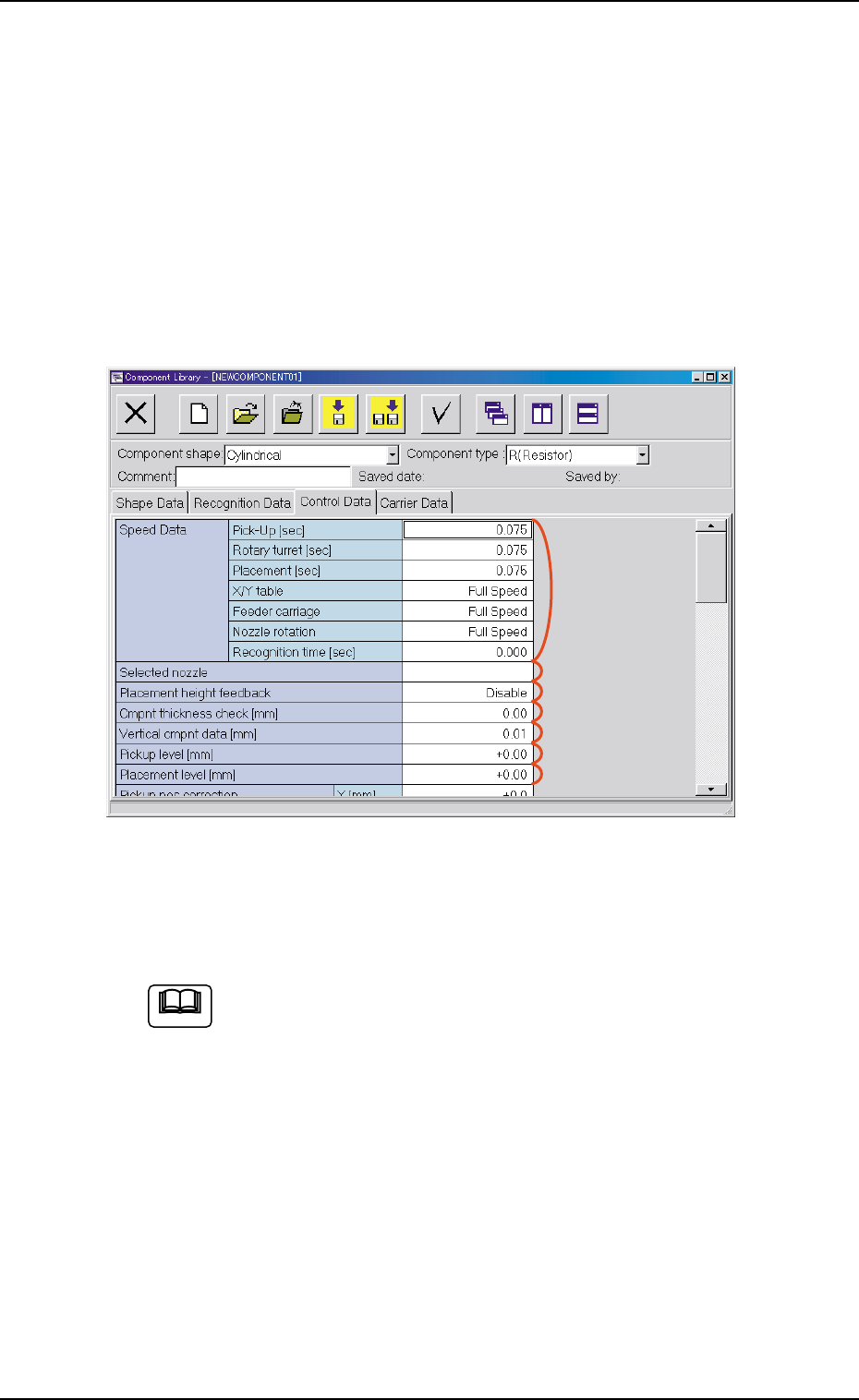
ᇎᑩѣܽ䚽ⱙܘӋᔷ⢋ “Cylindrical(᷆ᔷ)ȡSquare(ᮎᔷ)ȡ
Deform(Simple)(ᓗᔷ(पϕ))ȡIC(Simple)ȡIC(Complex(
ᴗ))ȡConnector(䖳ఽ)(Simple)ȡConnector(䖳ఽ)
(Complex)ȡOther Leaded(ҫ Lead)(Simple)ȡOther Leaded
(ҫ Lead)(Complex)” ⱙ Tab 乊䴷Ȣ
••
••
•
乊䴷ᰓ⼏乊䴷ᰓ⼏
乊䴷ᰓ⼏乊䴷ᰓ⼏
乊䴷ᰓ⼏
पߐ[Control Data]Tabͼᰓ⼏ “Control Data”Tab 乊䴷Ȣ
••
••
•
乊䴷ᵙ៥乊䴷ᵙ៥
乊䴷ᵙ៥乊䴷ᵙ៥
乊䴷ᵙ៥
݈ѣᭅⱙ䕨ܺͼ䇌গ✼ “2 㡗 4.2 ᭜ᴁḛⱙාᴁ᪢Ա ”
サ㡗Ȣ
* Speed Data(* Speed Data(
* Speed Data(* Speed Data(
* Speed Data(
䗴ᑻᭅ䗴ᑻᭅ
䗴ᑻᭅ䗴ᑻᭅ
䗴ᑻᭅ
))
))
)
ȡȡ
ȡȡ
ȡ
*2 Selected nozzle(*2 Selected nozzle(
*2 Selected nozzle(*2 Selected nozzle(
*2 Selected nozzle(
Ք⫽ఉՔ⫽ఉ
Ք⫽ఉՔ⫽ఉ
Ք⫽ఉ
))
))
)
ȡȡ
ȡȡ
ȡ
*3 Placement height feedback(*3 Placement height feedback(
*3 Placement height feedback(*3 Placement height feedback(
*3 Placement height feedback(
ᅞ㺚傭ᑻঢ佝ᅞ㺚傭ᑻঢ佝
ᅞ㺚傭ᑻঢ佝ᅞ㺚傭ᑻঢ佝
ᅞ㺚傭ᑻঢ佝
))
))
)
ȡȡ
ȡȡ
ȡ
*4 Cmpnt thickness check(*4 Cmpnt thickness check(
*4 Cmpnt thickness check(*4 Cmpnt thickness check(
*4 Cmpnt thickness check(
ܘӋ९ᑻẕᶺܘӋ९ᑻẕᶺ
ܘӋ९ᑻẕᶺܘӋ९ᑻẕᶺ
ܘӋ९ᑻẕᶺ
)[mm])[mm]
)[mm])[mm]
)[mm]
ȡȡ
ȡȡ
ȡ
*5 Vertical cmpnt data(*5 Vertical cmpnt data(
*5 Vertical cmpnt data(*5 Vertical cmpnt data(
*5 Vertical cmpnt data(
ⳉ゠ẕ⌠傭ᑻⳉ゠ẕ⌠傭ᑻ
ⳉ゠ẕ⌠傭ᑻⳉ゠ẕ⌠傭ᑻ
ⳉ゠ẕ⌠傭ᑻ
)[mm])[mm]
)[mm])[mm]
)[mm]
ȡȡ
ȡȡ
ȡ
*6 Pickup level(*6 Pickup level(
*6 Pickup level(*6 Pickup level(
*6 Pickup level(
䰙傭ᑻ䰙傭ᑻ
䰙傭ᑻ䰙傭ᑻ
䰙傭ᑻ
)[mm])[mm]
)[mm])[mm]
)[mm]
ȡȡ
ȡȡ
ȡ
*7 Placement level(*7 Placement level(
*7 Placement level(*7 Placement level(
*7 Placement level(
ᅞ㺚傭ᑻᅞ㺚傭ᑻ
ᅞ㺚傭ᑻᅞ㺚傭ᑻ
ᅞ㺚傭ᑻ
)[mm])[mm]
)[mm])[mm]
)[mm]
Fig.3C 7Fig.3C7
Fig.3C 7Fig.3C7
Fig.3C 7 “
Control DataControl Data
Control DataControl Data
Control Data”
TabTab
TabTab
Tab
乊䴷乊䴷
乊䴷乊䴷
乊䴷
(Cylindrical)(Cylindrical)
(Cylindrical)(Cylindrical)
(Cylindrical)
ՠՠ
ՠՠ
ՠ
2.42.4
2.42.4
2.4 “
Control Data(Control Data(
Control Data(Control Data(
Control Data(
ࠋᭅࠋᭅ
ࠋᭅࠋᭅ
ࠋᭅ
))
))
) ”
TabTab
TabTab
Tab
0107-001 3-33
Note
᭜ᴁḛ䕨ܺᭅȢ
* *
* *
*
*2*2
*2*2
*2
*3*3
*3*3
*3
*4*4
*4*4
*4
*5*5
*5*5
*5
*6*6
*6*6
*6
*7*7
*7*7
*7
0107-001 3-34
2.42.4
2.42.4
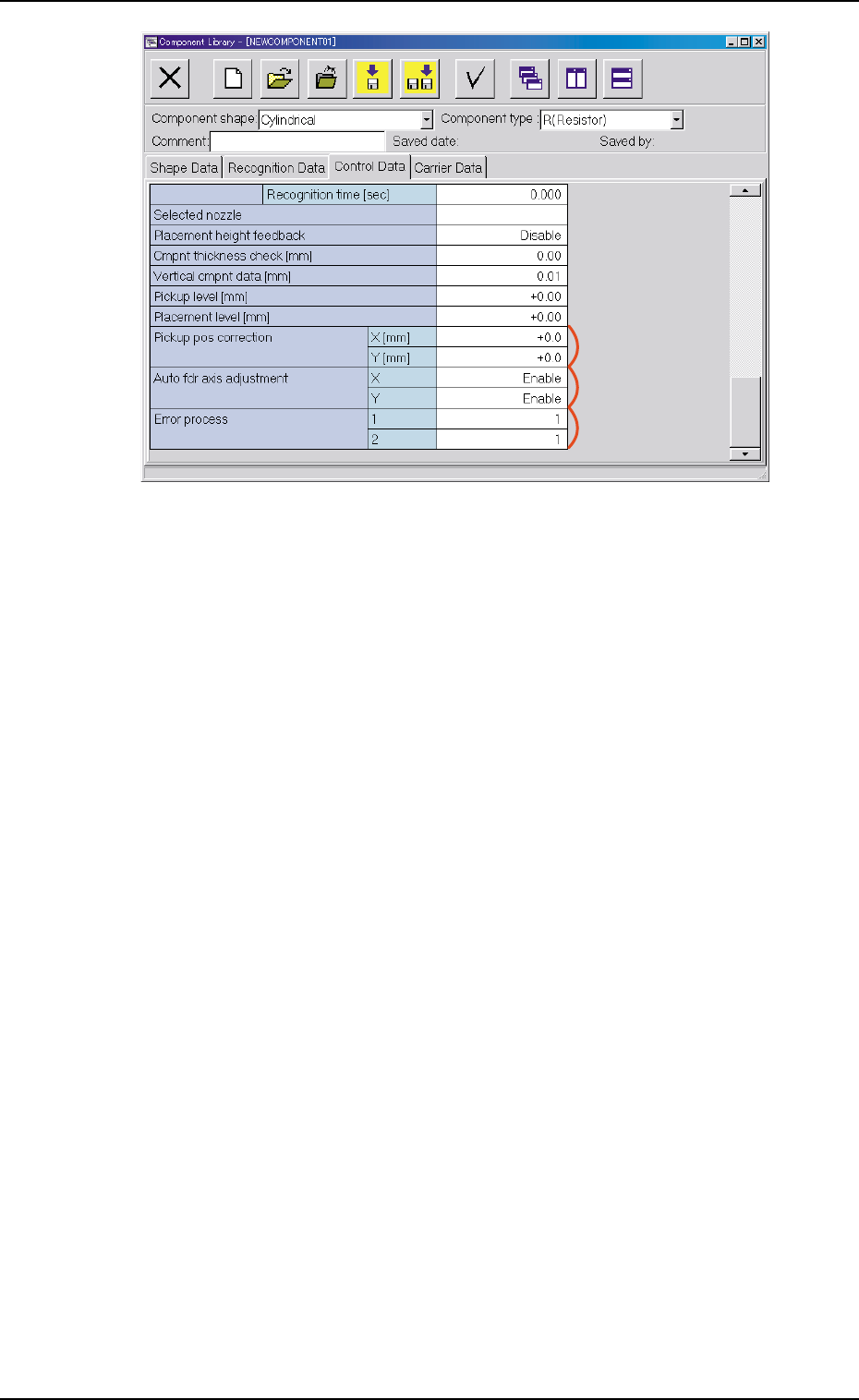
2.4 “
Control Data(Control Data(
Control Data(Control Data(
Control Data(
ࠋᭅࠋᭅ
ࠋᭅࠋᭅ
ࠋᭅ
))
))
) ”
TabTab
TabTab
Tab
Fig.3C18Fig.3C18
Fig.3C18Fig.3C18
Fig.3C18 “
Control DataControl Data
Control DataControl Data
Control Data”
TabTab
TabTab
Tab
乊䴷乊䴷
乊䴷乊䴷
乊䴷
((
((
(
᷆ᔷ᷆ᔷ
᷆ᔷ᷆ᔷ
᷆ᔷ
))
))
)
ՠՠ
ՠՠ
ՠ
*8 Pickup pos correction(*8 Pickup pos correction(
*8 Pickup pos correction(*8 Pickup pos correction(
*8 Pickup pos correction(
䰙Ԣ㕃㸺ℸ䰙Ԣ㕃㸺ℸ
䰙Ԣ㕃㸺ℸ䰙Ԣ㕃㸺ℸ
䰙Ԣ㕃㸺ℸ
))
))
)
ȡȡ
ȡȡ
ȡ
*9 Auto fdr axis adjustment(*9 Auto fdr axis adjustment(
*9 Auto fdr axis adjustment(*9 Auto fdr axis adjustment(
*9 Auto fdr axis adjustment(
䰙Ԣ㕃㸺ℸ䎴䏿䰙Ԣ㕃㸺ℸ䎴䏿
䰙Ԣ㕃㸺ℸ䎴䏿䰙Ԣ㕃㸺ℸ䎴䏿
䰙Ԣ㕃㸺ℸ䎴䏿
))
))
)
ȡȡ
ȡȡ
ȡ
*10 Error process(*10 Error process(
*10 Error process(*10 Error process(
*10 Error process(
ᓗᐍ໙⧛ᓗᐍ໙⧛
ᓗᐍ໙⧛ᓗᐍ໙⧛
ᓗᐍ໙⧛
))
))
)
᭜ᴁḛ䕨ܺᭅȢ
*8*8
*8*8
*8
*9*9
*9*9
*9
*10*10
*10*10
*10