JM-50_SPE_JP.pdf - 第12页
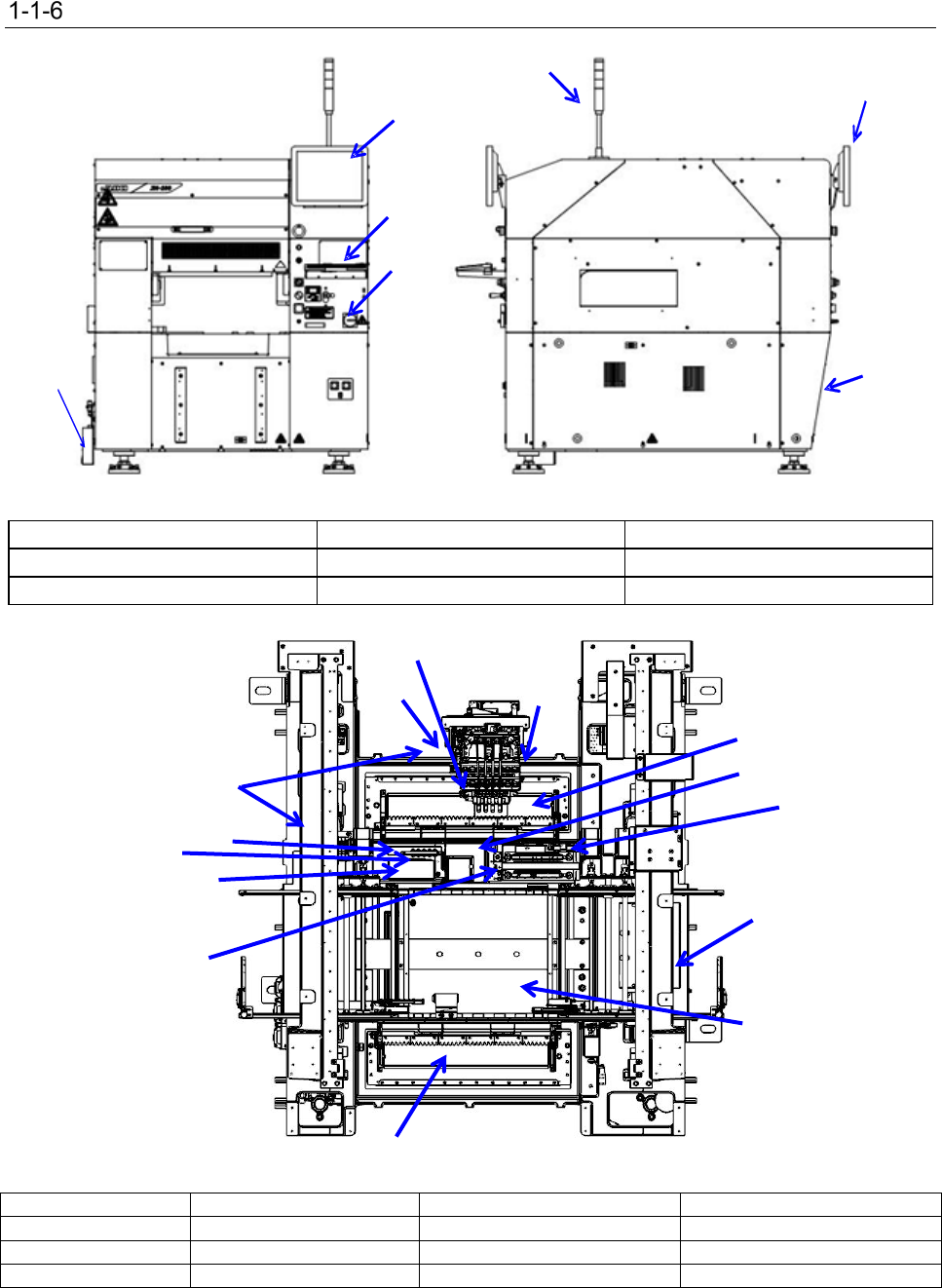
第 1 部 基本編 第 1 章 装置の概要 8 ⑨ ⑫ ⑩ ⑬ 本装置の構成 ① ATC ユニット ⑤基板搬送ユニット ⑨ CAL ブロックユニット ⑬多ピンリード矯正ジグ ( OP) ②ヘッドユニット ⑥ 3D センサユニット (OP) ⑩フィーダバンクユニット ③ OCC ユニット ⑦ X-Y ユニット ⑪リード矯正ジグ (OP) ④ HMS ユニット ⑧廃棄 B OX ⑫サポートテーブル ( ※ 1) . ①フロント液晶モ ニタ …
1 1
7
R-ATC (Removable Auto Tool Changer)
HMS
(Height Measurement System)
HOD
(Handheld Operating Device)
IFS-NX
(Intelligent Feeder System)
LNC Laser align New Concept
MTS
Matrix Tray Server
OCC
(Offset Correction Camera)
PWB
(Printed Wiring Board)
第 1 部 基本編 第 1 章 装置の概要
8
⑨
⑫
⑩
⑬
本装置の構成
①ATC ユニット ⑤基板搬送ユニット ⑨CAL ブロックユニット ⑬多ピンリード矯正ジグ(OP)
②ヘッドユニット ⑥3D センサユニット(OP) ⑩フィーダバンクユニット
③OCC ユニット ⑦X-Y ユニット ⑪リード矯正ジグ(OP)
④HMS ユニット ⑧廃棄 BOX ⑫サポートテーブル(※1)
.
①フロント液晶モニタ
.
④シグナルライト
.
⑦ブレーカ
(
リア
-
右側
)
.
②キーボード
(OP)
.
⑤エアレギュレータ
.
③電源スイッチ
.
⑥リア液晶モニタ
(OP)
①
②
③
④
⑦
⑤
⑥
①
⑥
⑤
③
④
②
⑦
⑪
⑧
⑩
⑩
1 1
9
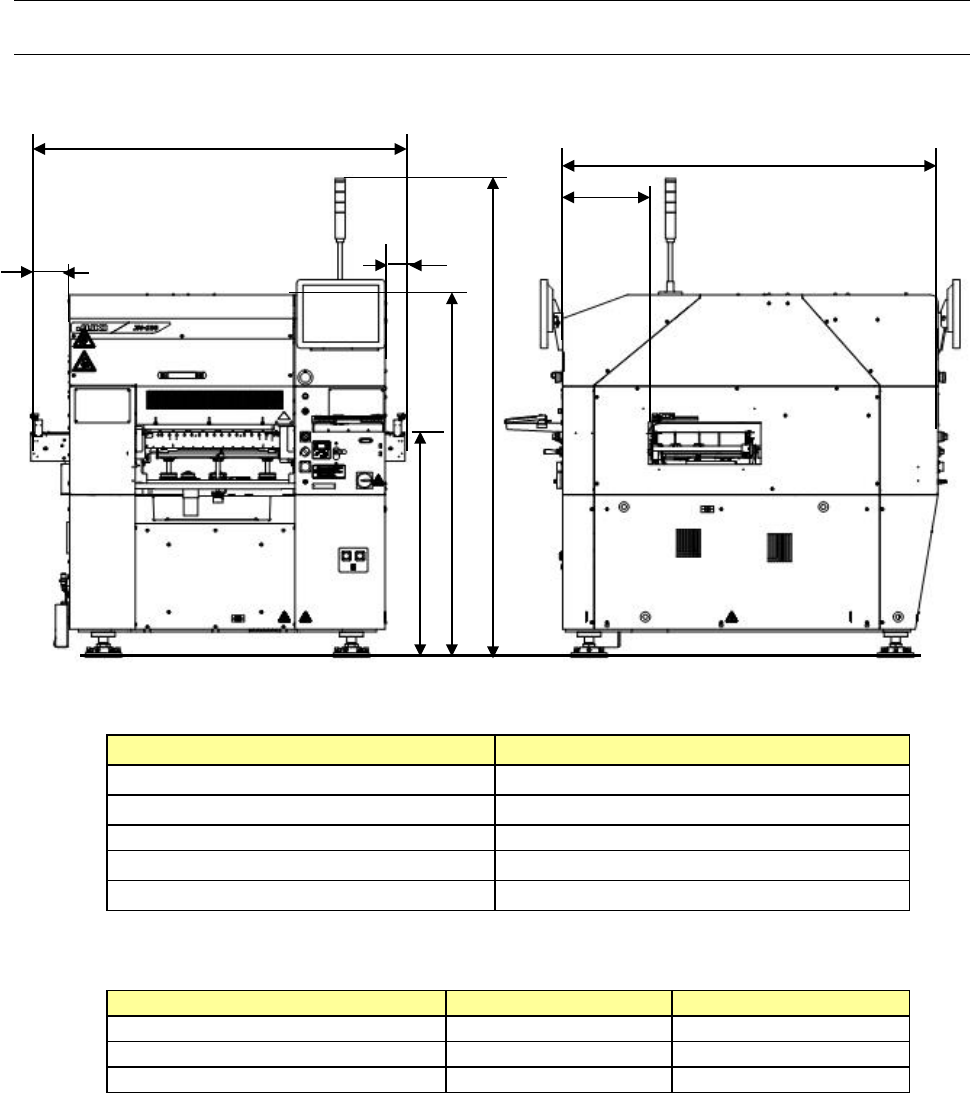
2
2-1
(1)
mm
A
1454
B
LCD
1,505
C
107
D
82
E
364
±5mm
mm
900mm
950mm
F
900
950
G
1,450
1,500
H
1925.7
1975.7
(2)
1,300Kg
1.
2.3
F
B
G
H
E
C
D