JM-50_SPE_JP.pdf - 第24页
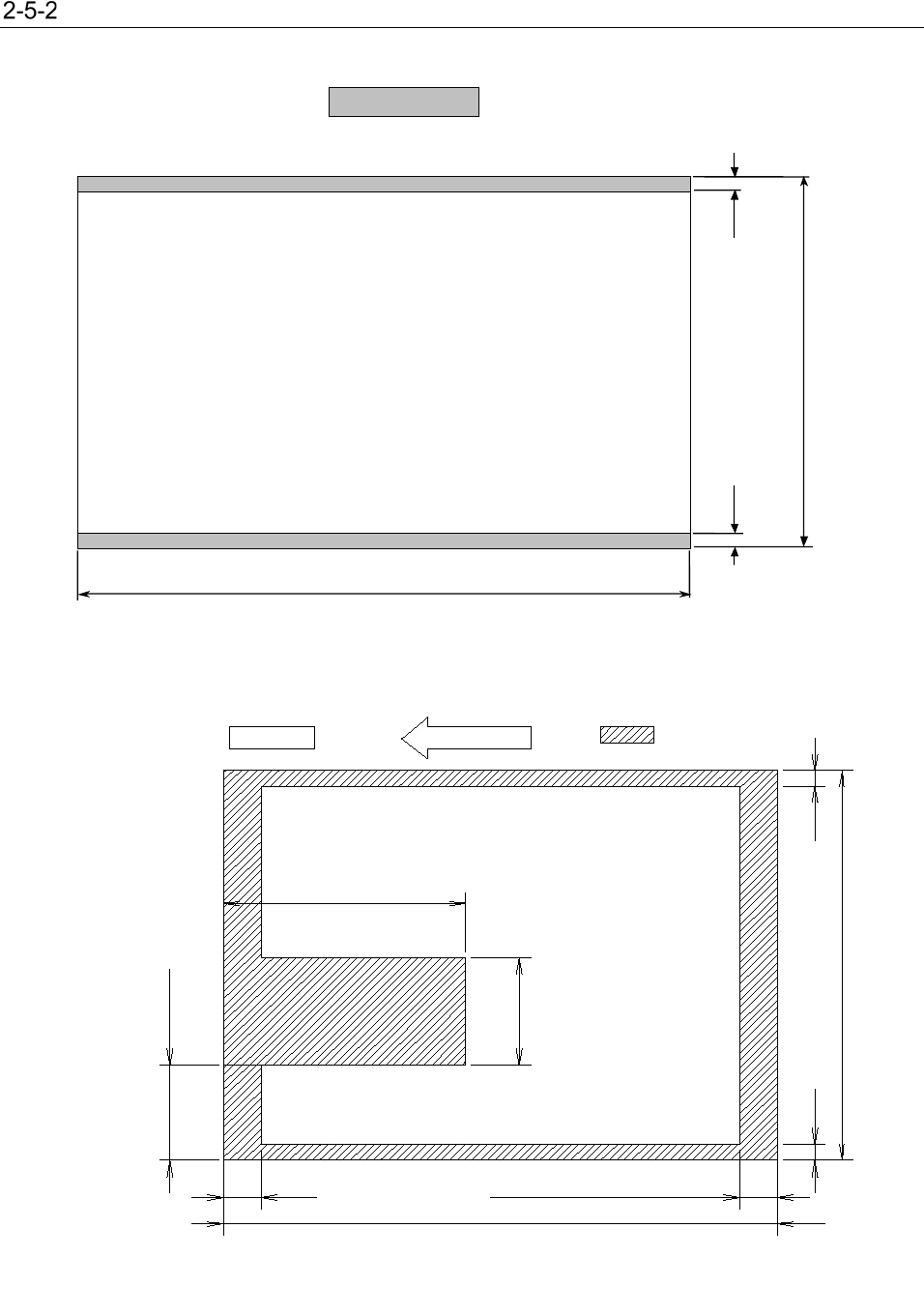
第 1 部 基本編 第 1 章 装置の概要 20 はサポートピン 設置不可範囲 1 5mm 5 0 mm 4 mm 4 mm 0~110m m 基板幅による 位置調整範囲 基板搬送方向 50~250m m 6 mm 410mm ~410mm 1 5mm 5 0 mm 410mmより 大 き い ~800mm 6mm 6mm 注:基板搬送方 向が、反対 方向(左流 れ)の時は、 バックアップピ ン設置不可範 囲は、上図と左 右対称にな る…
1 1
19
1)
2)
はサポートピン設置不可範囲
50~250mm
50~410mm
15mm
50mm
6mm
基板サイズ400mm以上の時 6mm
4mm
4mm
0~110mm
基板幅による位置調整範囲
基板搬送方向M基板仕様
50
~360mm
50
~410mm(800mm:2
回送り時)
3mm
3mm
搬送レール固定側
4.5
第 1 部 基本編 第 1 章 装置の概要
20
はサポートピン設置不可範囲
15mm
50mm
4mm
4mm
0~110mm
基板幅による位置調整範囲
基板搬送方向
50~250mm
6mm
410mm
~410mm
15mm
50mm
410mmより大きい~800mm
6mm
6mm
注:基板搬送方向が、反対方向(左流れ)の時は、バックアップピン設置不可範囲は、上図と左右対称になる。
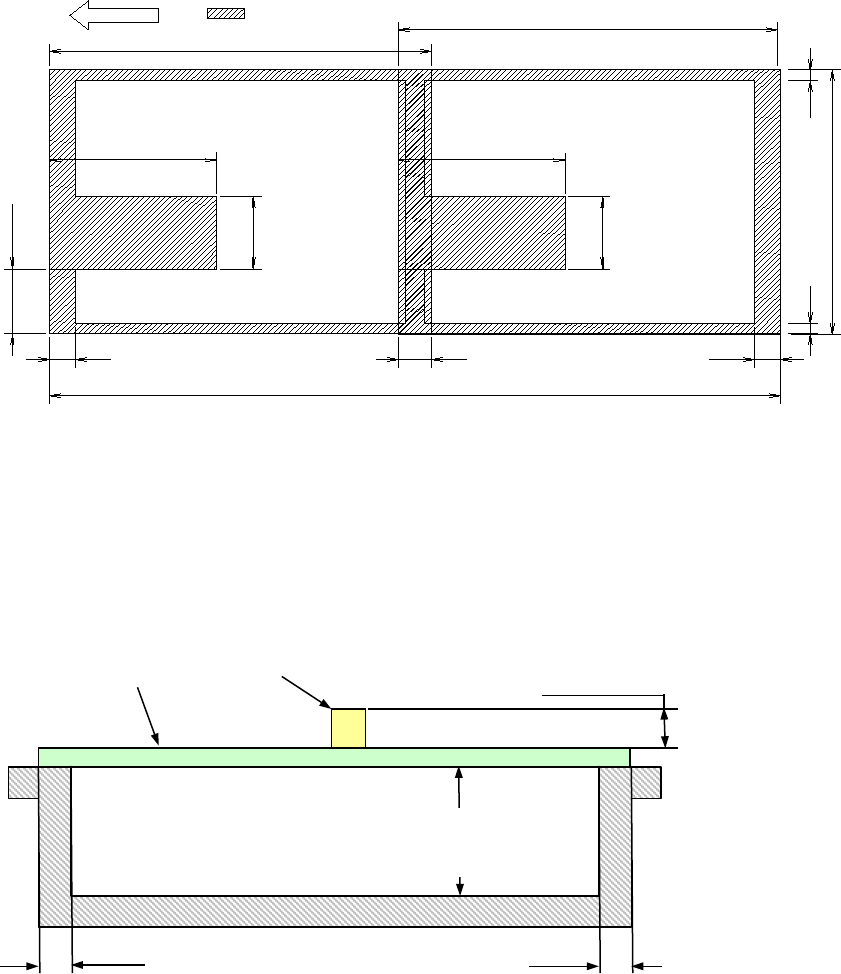
3) 搭載部品高さ及び基板裏面搬送高さ範囲
※ 1:部品高さにより、16/20/25/30mm ソフト切り替え
※ 2:実装済み既存部品の高さは、部品高さ仕様以下であること。
※ 3:レーザ認識部品の部品高さは『1-5 対象部品 (2)レーザ認識部品の認識高さ』
画像認識の部品高さは 『1-5 対象部品 (3)画像認識部品の認識高さ』 を参照してください。
基板クランプ方式
基板上面を基準とし、固定側、可動側とも搬送レールで基板前後端部を挟持して、基板をクランプする方式です。
基板幅調整方式
モータによる自動基板幅調整方式。(オプション)
4)
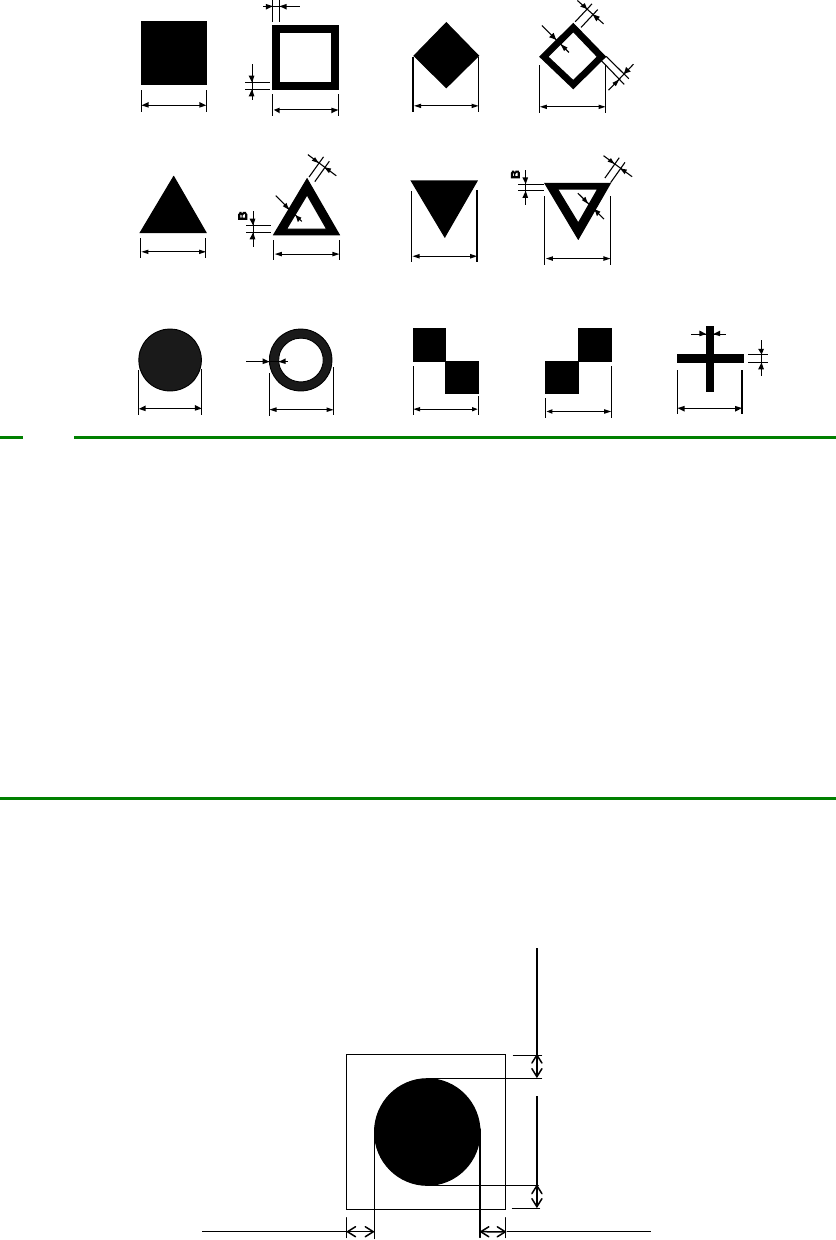
認識用マーク
1)形状
認識用のマークは、下記の条件で作成してください。
ただし、形状は、むらなく塗りつぶした円形を推奨します。
3mm
3mm
バックアップテーブル時:
25mm
基板裏面
搭載可能範囲
30mm
部品
基板
1 1
21
A
C
C
A
B
A
B
B
三角形
A
B
A
B
C
C
B
B
B
正方形
中抜き正方形
菱形
中抜き菱形
円形
中抜き円形
B
A
C
B
A
C
B
B
中抜き三角形 逆三角形 中抜き逆三角形
市松模様(1)
市松模様(2)
十字
1.
“”
90°
2.
3.
4.
1 2 3
50 2 3
5.
6.
2
X 0.5mmY 0.5 mm
A C
0.53.0 mm ± 10%
B
0.2 mm
注意
0.5mm
0.5 mm
0.5mm
0.5mm