KE-3010_20_MS参数说明.pdf - 第33页
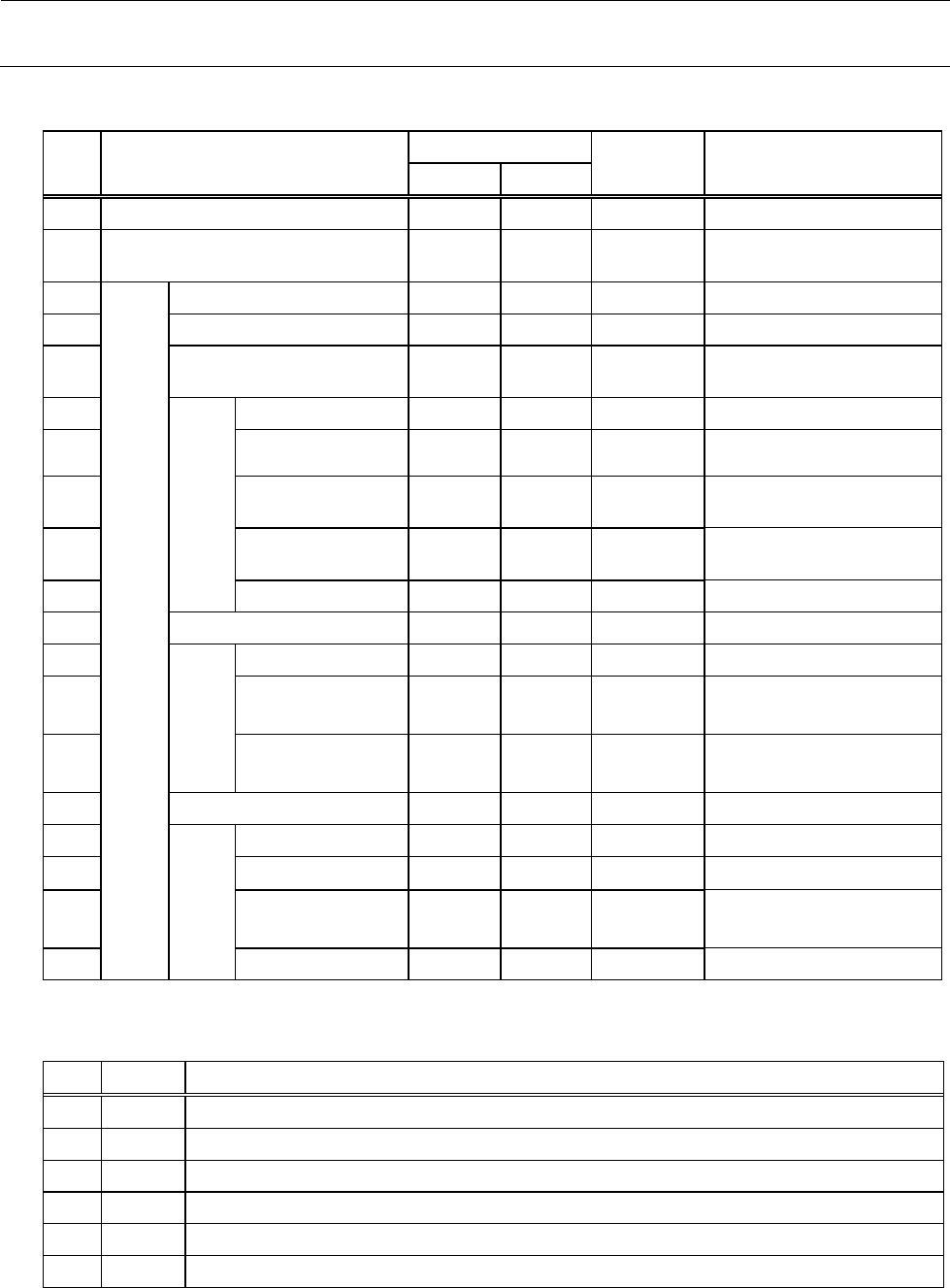
机器控制参数 2- 24 2-2-3-1 设定项目 No. 项目 输入范围 单位 备考 最小值 最大值 1 轴号 1 2 Y 轴 1 、 Y 轴 2 2 1 脉冲的 XY 轴分辨率 1nm /Pul s e 3 PTP 动作 数据 速度区分 0 9 参照 2-2-3- 2 速度区分 4 行程区分 0 19 参照 2-2-3- 3 行程区分 5 行程 - 10000 0 100000 6 轴控 制参 数 加速度 - 10 10 G 7 减…
机器控制参数
2-23
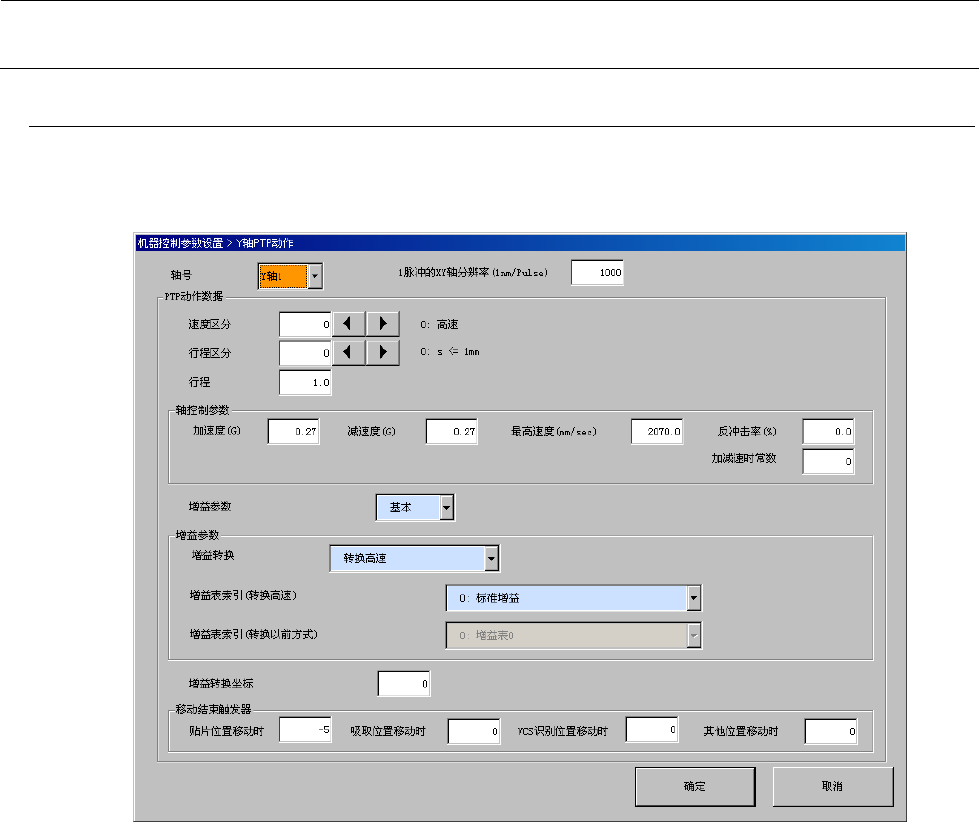
2-2-3 Y
轴
PTP
动作
如将“軸号”、“速度区分”、“行程区分”设置为欲编辑的索引,即可对所设定的区分中的軸控制参
数进行编辑。
机器控制参数
2-24
2-2-3-1
设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1
轴号
1 2
Y轴1、Y轴2
2
1脉冲的XY轴分辨率
1nm/Puls
e
3
PTP
动作
数据
速度区分
0
9
参照
2-2-3-2
速度区分
4
行程区分
0 19
参照 2-2-3-3 行程区分
5
行程
-10000
0
100000
6
轴控
制参
数
加速度
-10 10 G
7
减速度
-10 10 G
8
最高速度
-10000
0
100000 mm/sec
9
反冲击率
-10000
0
100000 %
10
加减速时常数
11
增益参数
0 1
基本、扩展
12
增益
参数
增益转换
0 1
13
增益表索引
(高速转换)
0
8
参照2-2-3-4增益表索引
(转换高速)※
14
增益转换坐标(以
前的方式转换)
0
9
参照2-2-3-5增益表索引
(转换以前方式)※
15
增益转换坐标
16
移动
结束
触发
器
贴片位置移动时
ms
17
吸取位置移动时
ms
18
VCS识别位置移
动时
ms
19
其他位置移动时
ms
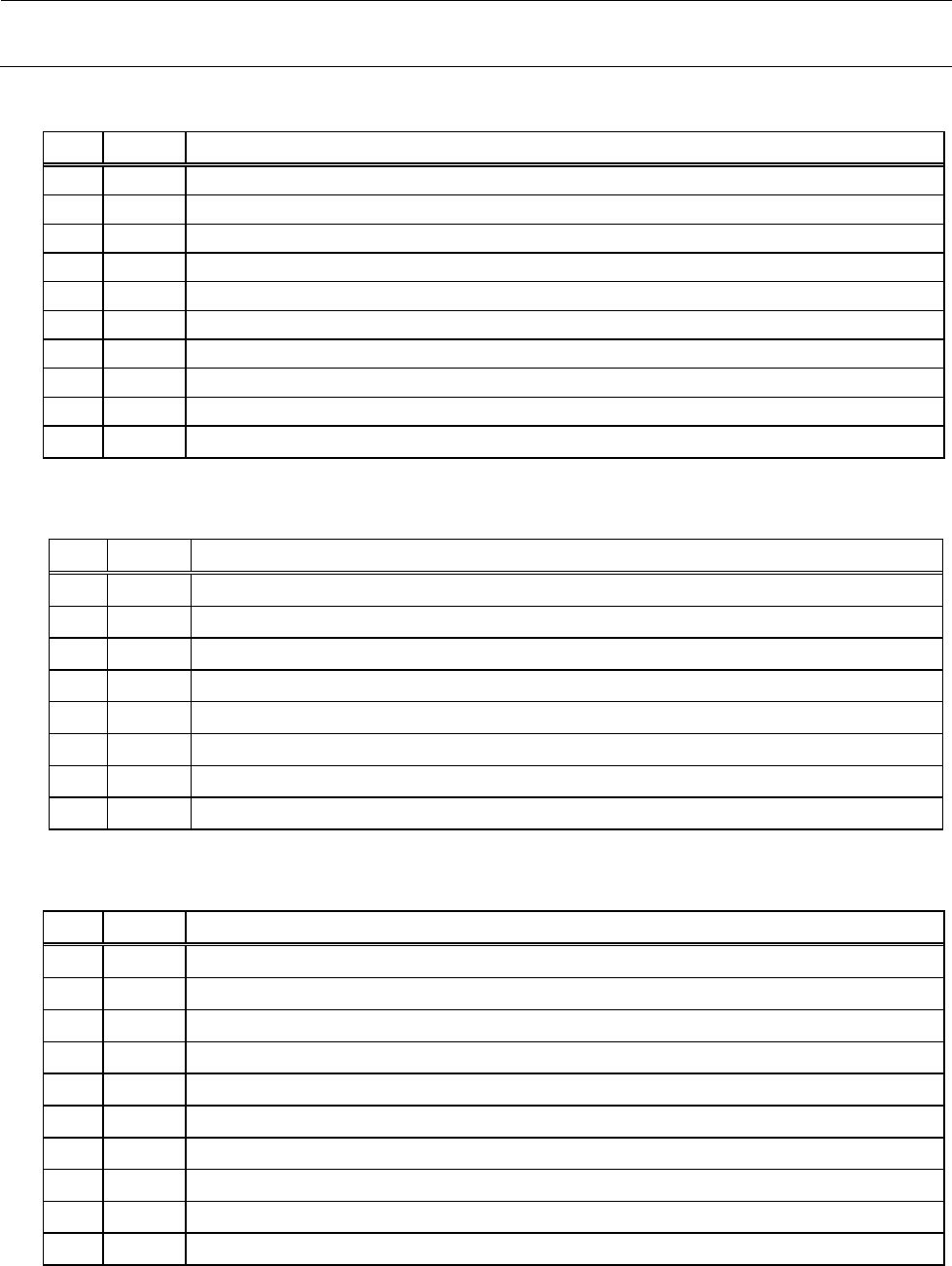
2-2-3-2
速度区分
No.
类别
内容
1 0
高速
2
1
中速
3 2
低速
4
3
超低速(特别定制)
5 4
高速2
6
5~9 预备
机器控制参数
2-25
2-2-3-3
行程区分
2-2-3-4
增益表索引(转换高速)
No.
类别
内容
1
0
使用标准增益
Pr126
~
Pr129
2 1
增益表 1 位置控制增益(使用伺服参数的Pr1c0~Pr1c2)
3
2
增益表
2
位置控制增益(使用伺服参数的
Pr1c3
~
Pr1c5
)
4 3
增益表 3 位置控制增益(使用伺服参数的Pr1c6~Pr1c8)
5 4
增益表 4 位置控制增益(使用伺服参数的Pr1c9~Pr1cb)
6
5
增益表
5
位置控制增益(使用伺服参数的
Pr1cc
~
Pr1ce
)
7 6
增益表 6 位置控制增益(使用伺服参数的Pr1cf~Pr1d1)
8
7
增益表
7
位置控制增益(使用伺服参数的
Pr1d2
~
Pr1d4
)
2-2-3-5
增益表索引(转换以前方式)
No.
类别
内容
1
0
s <= 1mm
2
1
1mm < s <= 2mm
3
2
2mm < s <= 4mm
4
3
4mm < s <= 10mm
5
4
10mm < s <= 20mm
6
5
20mm < s <= 40mm
7
6
40mm < s <= 70mm
8
7
70mm < s <= 110mm
9
8
110mm < s <= 160mm
10
9
~
19
预备
No.
类别
内容
1 0
增益表 0
2 1
增益表 1
3
2
增益表
2
4 3
增益表 3
5
4
增益表
4
6 5
增益表 5
7 6
增益表 6
8
7
增益表
7
9 8
增益表 8
10
9
增益表
9