20201214104315.pdf - 第11页
10 S o lution 3 M OT O MA N - G P S e rie s 提高生产性 So l ution 3 镜面加工 无需示教实现熟练工的技巧! 本公司机器人 MOTOMAN 和机器人控制柜 YRC1000 标准搭载了打磨作业的程序。通过改善动作轨迹,实现了熟练工般顺滑的 高品质打磨技术。 “ 机器人技术和应用技术的融合 融合 自动生成程序,对应丰富的打磨形式 往返动作 圆弧 高速化 加工时间缩短 可搬质量提高 提高产…
9
S o lution
2
MOTOMAN
-
GP Series
使设备紧凑化 使设备标准化
机器人控制柜YRC1000
机器人控制柜YRC1000
编程示教器
小尺寸减少设置空间
全球标准化
·
·
·
YRC1000
现有机型
·
·
·
·
·
机器人控制柜YRC1000micro
(选项)
强化安全功能(选项)
·
对应监控机器人动作领域、速度限制的安全功能
更紧凑、更轻量的控制柜
·
实现容积15L的紧凑尺寸*
·
重量仅10.5kg(与现有机型相比减少9.5kg)*
·
可置于19英寸的架子、设备或传送带内
和周边设备连接简便
·
可简便地与本公司的控制器(MP系列)、PLC、传感器或
HMI等外部设备连接
Sol ution
2
*
: 日本、亚洲、北美规格
客户需求
客户需求
客户需求 客户需求
提高作业效率 提高作业效率
实现了内置外部3轴且无需变压器的尺寸!
海外各规格共通
欧洲规格(CE规格)、北美规格(UL规格)
中国规格为3相380V规格,无需变压器
编程示教器轻量化·提高操作性
适用新动作控制(高精度·高速化)
内置外部3轴,无需变压器,
实现容积125L的紧凑尺寸
重量仅730g
可用3D机器人模型确认机器人的示教位置
可通过触摸屏画面直接操作
通过新加减速控制,循环时间比现有机型改善最大约10%
(根据条件)
大幅改善动作速度变动时的轨迹精度误差
(比现有机型提高80%)
机器人控制柜YRC1000micro
编程示教器
客户需求
客户需求
客户需求客户需求
使设备紧凑化
使设备标准化
提高作业效率
使设备紧凑化
适用新动作控制(高精度·高速化)
·
·
通过新加减速控制,循环时间比现有机型改善最大约10%
(根据条件)
大幅改善动作速度变动时的轨迹精度误差
(比现有机型提高80%)
项目 规格
外形尺寸
152 (W)×49.5 (D)×300 (H) mm
概略质量
0.730 kg
材质 强化塑料
操作设备
选择键,轴操作键,数值
/
应用建,带钥匙切换模式键(示教模式、再现模式、远程模式)
急停键,使 能 键,
SD
卡
I/F
装 置(
SD
卡为选配 ),
USB
端 口(
USB2.0 1
接口)
显示屏
5.7
英寸
TFT
彩色液晶触摸屏
VGA
(
640×480
像素)
(汉字、平假名、片假名、英文、数字、其他)
保护等级
IP54
电缆长度 标准
: 8 m,
最 大( 选配):
36m
(追加延长电缆)
■
机器人控制柜
YRC1000micro
规格
项目 规格
构造 开放构造
IP20
外形尺寸
425 (
宽
)×280 (
深
)×125 (
高
) mm, 15 L
概略质量
10.5 kg
冷却方式 直接冷却
周围温度 通常时 :
0
℃
~+45
℃
保管时 :
-10
℃
~+60
℃
相对湿度
90%
以下(无结露)
标高
2000 m (
但会存在温度延迟)
(注)标高
1000m
以上的条件 :按周围最高温度每上升
100m
减少
1%
电源规格
单相
AC200/230 V (+10% ~ –15%), 50/60 Hz (±2%)*
三相
AC200/220 V (+10% ~ –15%), 50/60 Hz (±2%)
控制柜型号不同,可连接的电源规格也不相同。
接地 工作接地(接地电阻
100Ω
以下)专用接地
输入输出信号
专用信号 :输入
7
,输出
1
通用信号 :输入
8
,输出
8
(晶体管输出
8
)
位置控制方式 串行通信方式(绝对值编码器)
储存容量
JOB
:
200,000
程序点,
10,000
机器人命令
CIO
梯形图
:
最大
1,500
程序点
.
扩张插槽
PCI express: 2
插槽
LAN
(上位连接)
1
个
(10BASE-T/100BASE-TX)
串口
I/F
无
控制方式 软件伺服
驱动单元
AC
伺服用伺服包
■
编程示教器规格
(
选项
)*
*: MOTOMAN-GP12
仅对应三相
*:
使用
YRC1000micro
时,下单时请一并购买选项的编程示教器或虚拟连接头。
虚拟连接头 :不连接编程示教器时,或使用软件示教器时,必须连接至虚拟连接头。
DX100
、
FS100
、
DX200
用示教器由于规格不同无法进行连接。
适用机型
MOTOMAN-GP7, -GP8, -GP12

10
S o lution
3
MOTOMAN
-
GP Series
提高生产性
Sol ution
3
镜面加工
无需示教实现熟练工的技巧!
本公司机器人MOTOMAN和机器人控制柜YRC1000标准搭载了打磨作业的程序。通过改善动作轨迹,实现了熟练工般顺滑的
高品质打磨技术。
“
机器人技术和应用技术的融合
融合
自动生成程序,对应丰富的打磨形式
往返动作 圆弧
高速化
加工时间缩短
可搬质量提高
提高产品的附加价值
无需示教
任何人都可使用
丰富的打磨动作
标准搭载职业的技术
更广作业空间
确保更合适的姿势
可对应恶劣环境
拥有粉尘、切削油飞散对策
产品打磨(镜面加工)
机器人的动作或安全功能的动作限制区域可在示教编程器上的3D图表画面
机器人的动作轨迹/ 姿势
执行IO
输出命令
执行IO
输出命令
作业命令区间
即使是机械锁定,也可确认机器人的
动作轨迹。
即使机器人不动作,也可确认程
序的示教位置。
示教位置/ 姿势
功能安全的动作限制区域可简单
的确认
显示步骤编号
新型示教器
功能安全的动作限制区域
减少示教后的确认
动作工时
进行确认
3D图表显示功能
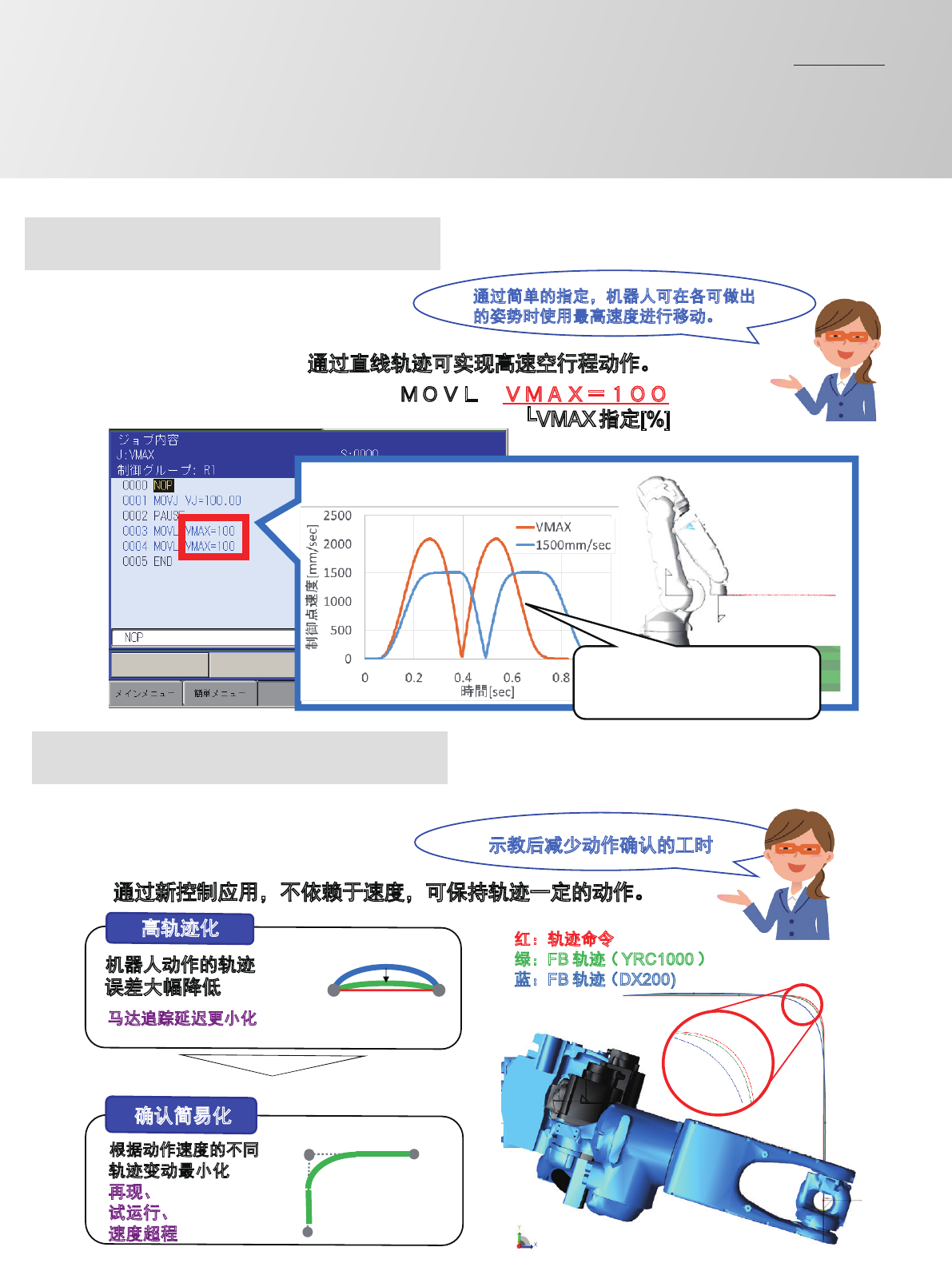
VMAX功能(高速动作)
提升轨迹精度
通过直线轨迹可实现高速空行程动作。
MOVL VMAX=100
└VMAX 指定[%]
通过简单的指定,机器人可在各可做出
的姿势时使用最高速度进行移动。
直线插补可实现速度为
1500mm/sec以上的动作
通过新控制应用,不依赖于速度,可保持轨迹一定的动作。
红:轨迹命令
绿:FB 轨迹( YRC1000 )
蓝:FB 轨迹(DX200)
高轨迹化
机器人动作的轨迹
误差大幅降低
马达追踪延迟更小化
根据动作速度的不同
轨迹变动最小化
再现、
试运行、
速度超程
确认简易化
示教后减少动作确认的工时
11
S o lution
3
MOTOMAN
-
GP Series
提高生产性
Sol ution
3
镜面加工
无需示教实现熟练工的技巧!
本公司机器人MOTOMAN和机器人控制柜YRC1000标准搭载了打磨作业的程序。通过改善动作轨迹,实现了熟练工般顺滑的
高品质打磨技术。
“
机器人技术和应用技术的融合
融合
自动生成程序,对应丰富的打磨形式
往返动作 圆弧
高速化
加工时间缩短
可搬质量提高
提高产品的附加价值
无需示教
任何人都可使用
丰富的打磨动作
标准搭载职业的技术
更广作业空间
确保更合适的姿势
可对应恶劣环境
拥有粉尘、切削油飞散对策
产品打磨(镜面加工)
机器人的动作或安全功能的动作限制区域可在示教编程器上的3D图表画面
机器人的动作轨迹/ 姿势
执行IO
输出命令
执行IO
输出命令
作业命令区间
即使是机械锁定,也可确认机器人的
动作轨迹。
即使机器人不动作,也可确认程
序的示教位置。
示教位置/ 姿势
功能安全的动作限制区域可简单
的确认
显示步骤编号
新型示教器
功能安全的动作限制区域
减少示教后的确认
动作工时
进行确认
3D图表显示功能
VMAX功能(高速动作)
提升轨迹精度
通过直线轨迹可实现高速空行程动作。
MOVL VMAX=100
└VMAX 指定[%]
通过简单的指定,机器人可在各可做出
的姿势时使用最高速度进行移动。
直线插补可实现速度为
1500mm/sec以上的动作
通过新控制应用,不依赖于速度,可保持轨迹一定的动作。
红:轨迹命令
绿:FB 轨迹( YRC1000 )
蓝:FB 轨迹(DX200)
高轨迹化
机器人动作的轨迹
误差大幅降低
马达追踪延迟更小化
根据动作速度的不同
轨迹变动最小化
再现、
试运行、
速度超程
确认简易化
示教后减少动作确认的工时