20201214104315.pdf - 第8页
7 S o lution 1 M OT O MA N - G P S e rie s G P 7 G P 8 G P 1 2 M O T O M A N - G P S e r i es Spe c i f ic a ti o n s G P 2 5 ■ 外形尺寸及动作范围 单位: mm : P 点动作范囲 视角 A 188 93 . 5 186 . 5 185 . 5 5 4 Φ 100 Φ 50 Φ 100 R 410 R 1440…
6
S o lution
1
MOTOMAN
-
GP Series
GP7 GP8
GP12
M O T O M A N
-
G P S e r i es Spec if ica tio n s
GP25
■
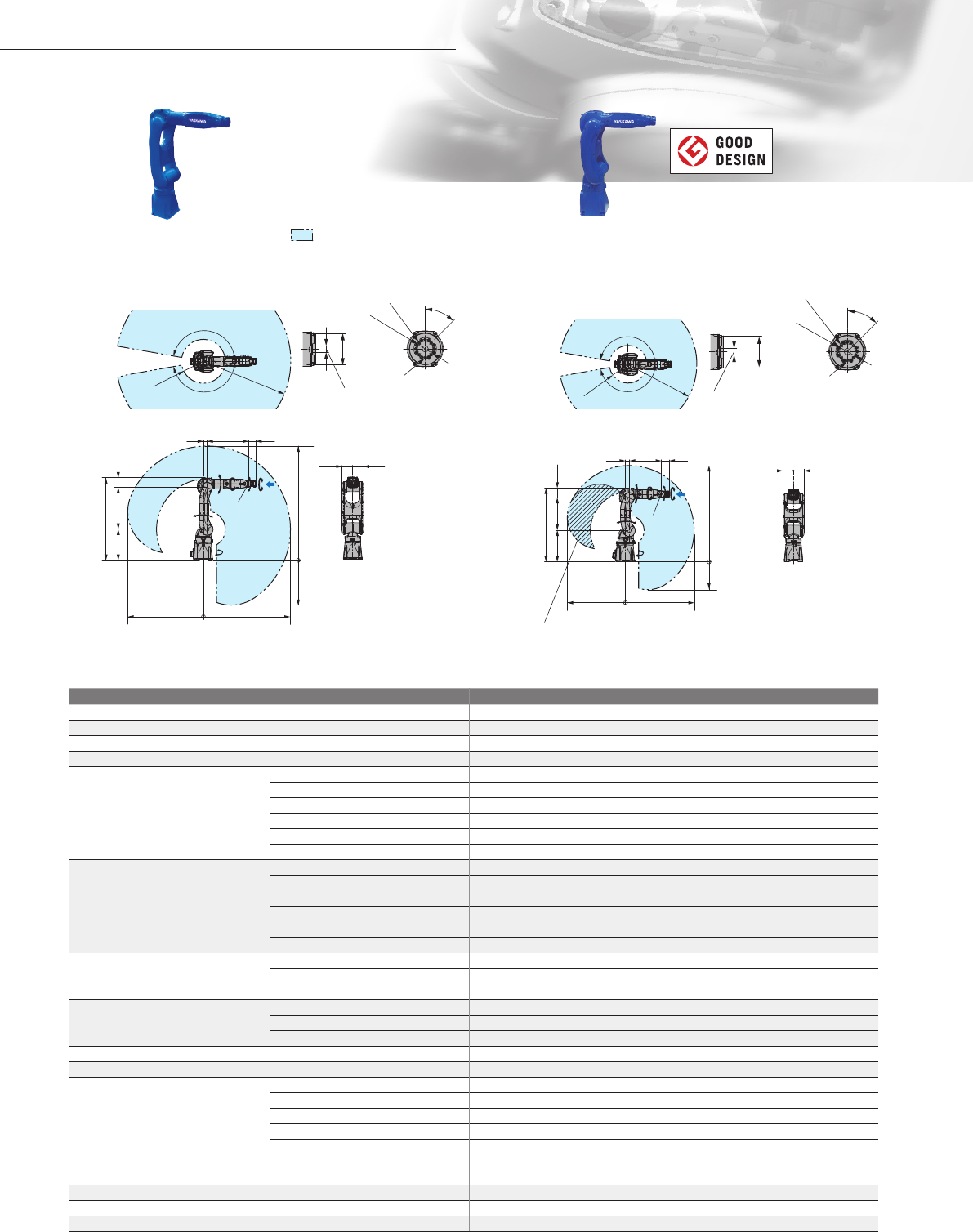
外形尺寸及动作范围 单位:mm
:
P点动作范囲
170
°
170
°
R
927
R
233
视角 A
330 445 102
877
P点
A
44040
1217
0
805
80
927
476
0
R
B
T
S
U
L
115115
45
°
Φ
31.5
Φ60
(嵌合深度3)
Φ12
(嵌合深度5)
Φ5
(深6)
8×M5×P0.8
(深8)
170
°
170
°
视角 A
115 115
R
199
R
727
34040
80
0
1017
P点
0
727
615
330
345 102
777
295
R
B
T
S
U
L
A
动作限制范围
*
6
45
°
Φ
31.5
Φ5
(深6)
Φ12
(嵌合深度5)
Φ60
(嵌合深度3)
8×M5×P0.8
(深8)
规格
GP7 GP8
型号
YR-1-06VX7-A00 YR-1-06VX8-A00
构造 垂直多关节型(
6
自由度) 垂直多关节型(
6
自由度)
可搬质量
*1
7 kg 8 kg
重复定位精度
*2
0.01 mm 0.01 mm
工作范围
S
轴
(旋转)
-
170°
~
+170°
-
170°
~
+170°
L
轴
(下腕) -
65°
~
+145°
-
65°
~
+145°
U
轴
(上臂)
*3
-
70°
~
+190°
-
70°
~
+190°
R
轴
(手腕旋转) -
190°
~
+190°
-
190°
~
+190°
B
轴
(手腕摆动) -
135°
~
+135°
-
135°
~
+135°
T
轴
(手腕回转) -
360°
~
+360°
-
360°
~
+360°
最大速度
S
轴
(旋转)
6.54 rad/s, 375°/s 7.94 rad/s, 455°/s
L
轴
(下腕)
5.50 rad/s, 315°/s 6.72 rad/s, 385°/s
U
轴
(上臂)
7.15 rad/s, 410°/s 9.07 rad/s, 520°/s
R
轴
(手腕旋转)
9.59 rad/s, 550°/s 9.59 rad/s, 550°/s
B
轴
(手腕摆动)
9.59 rad/s, 550°/s 9.59 rad/s, 550°/s
T
轴
(手腕回转)
17.45 rad/s, 1000°/s 17.45 rad/s, 1000°/s
容许力矩
R
轴
(手腕旋转)
17 N·m 17 N·m
B
轴
(手腕摆动)
17 N·m 17 N·m
T
轴
(手腕回转)
10 N·m 10 N·m
容许惯性力矩
(
GD
2
/4
)
R
轴
(手腕旋转)
0.5 kg·m
2
0.5 kg·m
2
B
轴
(手腕摆动)
0.5 kg·m
2
0.5 kg·m
2
T
轴
(手腕回转)
0.2 kg·m
2
0.2 kg·m
2
本体质量
34 kg 32 kg
保护等级
IP67
设置环境
温度
0˚C
~
+45˚C
湿度
20%
~
80%RH
( 无结露 )
振动加速度
4.9 m/s2 (0.5 G)
以下
标高
1000 m
以下
其他
无引燃性或腐蚀性气体、液体
远离电气噪音源
无强磁场
电源容量
*4
1.0 kVA
设置方式
*5
置地式、倒装式、壁挂式、倾斜式
适用控制柜
YRC1000, YRC1000micro
*1: U
臂上负载根据手腕部负载质量变化。
*2: ISO 9283
为基准。
*3: U
轴
记载的是自轴的动作范围而不是对地基准。
*4:
因用途、动作模式而异。
*5:
壁挂式、倾斜式设置时,
S
轴有动作限制。
*6:
使用气体且电磁阀内置时(选项),相对侧接头适用时,斜线部分的动作范围有限制。
注
:
本表记载的是
SI
单位。
7
S o lution
1
MOTOMAN
-
GP Series
GP7 GP8
GP12
M O T O M A N
-
G P S e r i es Spec if ica tio n s
GP25
■
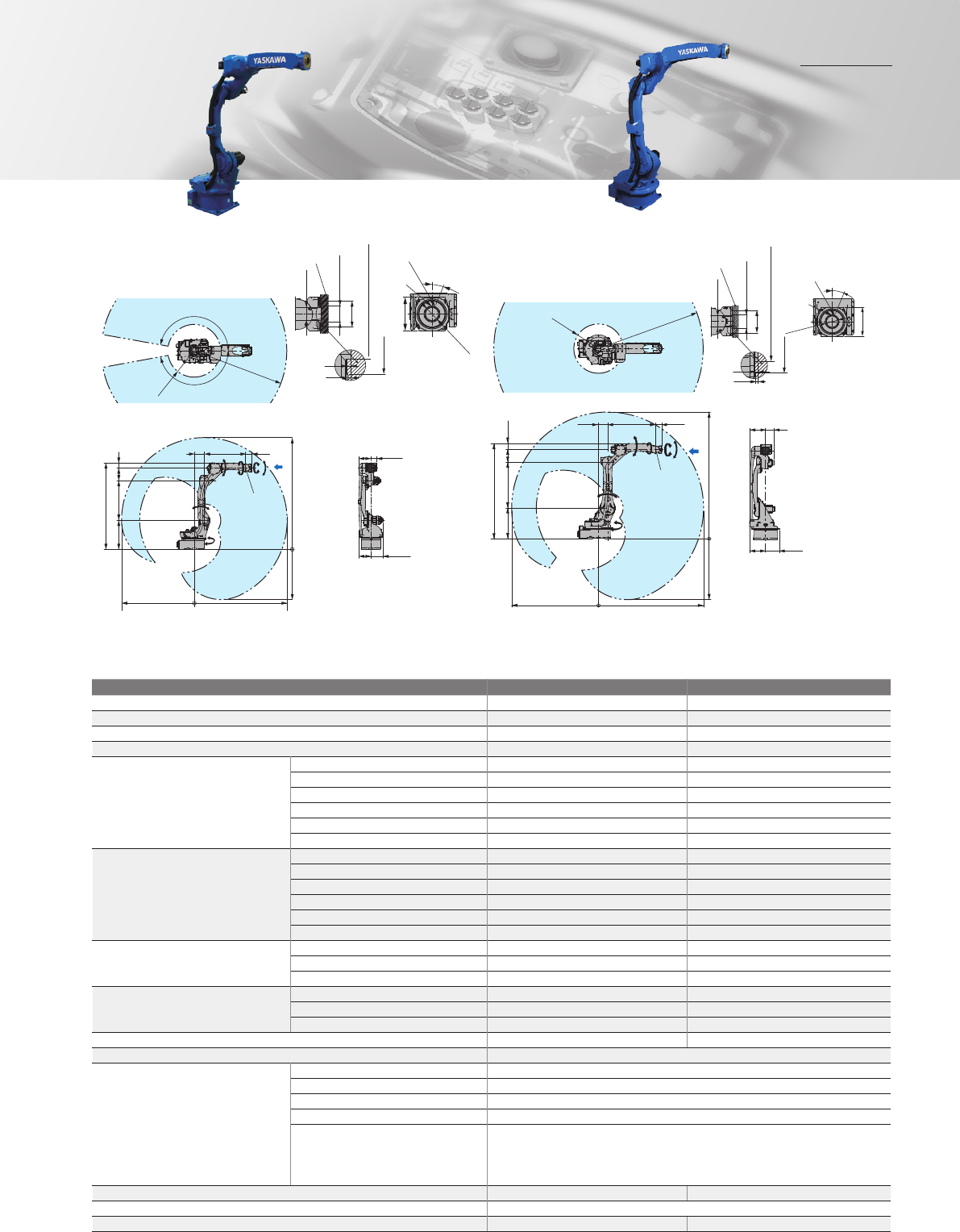
外形尺寸及动作范围 单位:mm
:
P点动作范囲
视角 A
188
93.5
186.5185.5
5
4
Φ
100
Φ50
Φ100
R
410
R
1440
170
°
170
°
Φ56
附件安装在此范围内
22
.
5
°
128
Φ62
Φ4
(
深
6
)
Φ62(嵌合深度5)
450 614
1345
200 81
155 640 100
777
1440
1129
1734
P点
A
B
T
R
U
S
L
0
0
8×M4×P0.7
(深8)
505 760
200
1004
1730
0
2085
0
1430
261
229
261 139
102
1567
150 100
P点
A
5
4
Φ
100
Φ50
Φ100
视角 A
B
T
R
U
S
L
795
22
.
5
°
Φ
56
128
Φ62
Φ62(嵌合深度5)
R
406
R
1730
附件安装在此范围内
Φ4
(
深
6
)
8×M4×P0.7
(深8)
规格
GP12 GP25
型号
YR-1-06VXH12-A00 YR-1-06VXH25-A00
构造 垂直多关节型(
6
自由度) 垂直多关节型(
6
自由度)
可搬质量
*1
12 kg 25 kg
重复定位精度
*2
0.02 mm 0.02 mm
工作范围
S
轴
(旋转)
-
170°
~
+170°
-
180°
~
+180°
L
轴
(下腕) -
90°
~
+155°
-
105°
~
+155°
U
轴
(上臂)
*3
-
85°
~
+150°
-
86°
~
+160°
R
轴
(手腕旋转) -
200°
~
+200°
-
200°
~
+200°
B
轴
(手腕摆动) -
150°
~
+150°
-
150°
~
+150°
T
轴
(手腕回转) -
455°
~
+455°
-
455°
~
+455°
最大速度
S
轴
(旋转)
4.53 rad/s, 260°/s 3.67 rad/s, 210°/s
L
轴
(下腕)
4.01 rad/s, 230°/s 3.67 rad/s, 210°/s
U
轴
(上臂)
4.53 rad/s, 260°/s 4.63 rad/s, 265°/s
R
轴
(手腕旋转)
8.20 rad/s, 470°/s 7.33 rad/s, 420°/s
B
轴
(手腕摆动)
8.20 rad/s, 470°/s 7.33 rad/s, 420°/s
T
轴
(手腕回转)
12.2 rad/s, 700°/s 15.44 rad/s, 885°/s
容许力矩
R
轴
(手腕旋转)
22 N·m 52 N·m
B
轴
(手腕摆动)
22 N·m 52 N·m
T
轴
(手腕回转)
9.8 N·m 32 N·m
容许惯性力矩
(
GD
2
/4
)
R
轴
(手腕旋转)
0.65 kg·m
2
2.3 kg·m
2
B
轴
(手腕摆动)
0.65 kg·m
2
2.3 kg·m
2
T
轴
(手腕回转)
0.17 kg·m
2
1.2 kg·m
2
本体质量
150 kg 250 kg
保护等级 本体
: IP54,
手腕
: IP67
设置环境
温度
0˚C
~
+45˚C
湿度
20%
~
80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
标高
1000 m
以下
其他
无引燃性或腐蚀性气体、液体
无水、油、粉尘
远离电气噪音源
无强磁场
电源容量
*4
1.5 kVA 2.0 kVA
设置方式
*5
置地式、倒装式、壁挂式、倾斜式
适用控制柜
YRC1000, YRC1000micro YRC1000
*1: U
臂上负载根据手腕部负载质量变化。
*2: ISO 9283
为基准。
*3: U
轴
记载的是自轴的动作范围而不是对地基准。
*4:
因用途、动作模式而异。
*5:
壁挂式、倾斜式设置时,
S
轴有动作限制。
注
:
本表记载的是
SI
单位。
8
S o lution
2
MOTOMAN
-
GP Series
使设备紧凑化 使设备标准化
机器人控制柜YRC1000
机器人控制柜YRC1000
编程示教器
小尺寸减少设置空间
全球标准化
·
·
·
YRC1000
现有机型
·
·
·
·
·
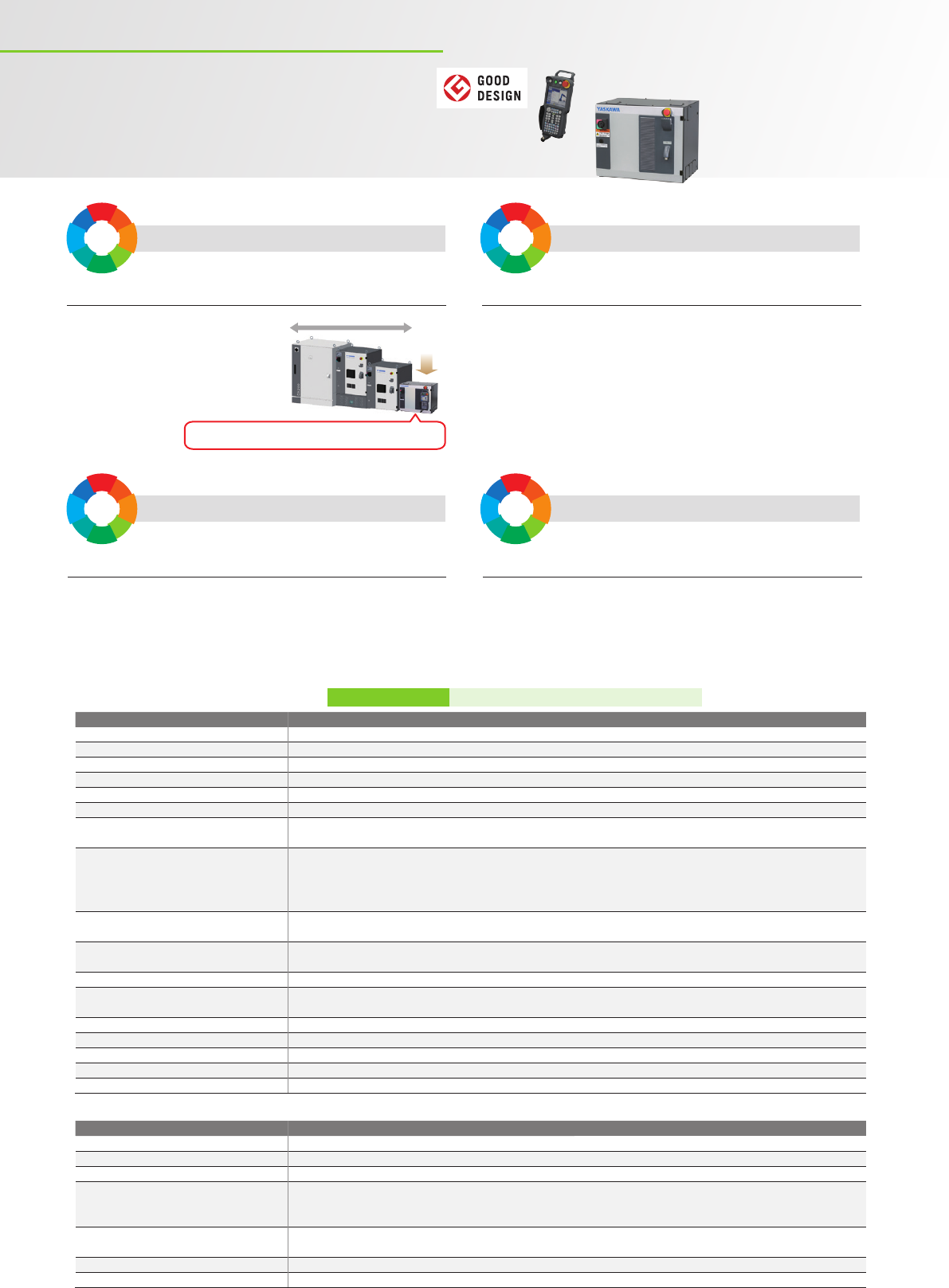
机器人控制柜YRC1000micro
(选项)
强化安全功能(选项)
·
对应监控机器人动作领域、速度限制的安全功能
更紧凑、更轻量的控制柜
·
实现容积15L的紧凑尺寸*
·
重量仅10.5kg(与现有机型相比减少9.5kg)*
·
可置于19英寸的架子、设备或传送带内
和周边设备连接简便
·
可简便地与本公司的控制器(MP系列)、PLC、传感器或
HMI等外部设备连接
Sol ution
2
*
: 日本、亚洲、北美规格
客户需求
客户需求
客户需求 客户需求
提高作业效率 提高作业效率
实现了内置外部3轴且无需变压器的尺寸!
海外各规格共通
欧洲规格(CE规格)、北美规格(UL规格)
中国规格为3相380V规格,无需变压器
编程示教器轻量化·提高操作性
适用新动作控制(高精度·高速化)
内置外部3轴,无需变压器,
实现容积125L的紧凑尺寸
重量仅730g
可用3D机器人模型确认机器人的示教位置
可通过触摸屏画面直接操作
通过新加减速控制,循环时间比现有机型改善最大约10%
(根据条件)
大幅改善动作速度变动时的轨迹精度误差
(比现有机型提高80%)
机器人控制柜YRC1000micro
编程示教器
客户需求
客户需求
客户需求客户需求
使设备紧凑化
使设备标准化
提高作业效率
使设备紧凑化
适用新动作控制(高精度·高速化)
·
·
通过新加减速控制,循环时间比现有机型改善最大约10%
(根据条件)
大幅改善动作速度变动时的轨迹精度误差
(比现有机型提高80%)
项目 规格
构造 防尘构造
IP54
(背面
FAN
部:
IP2X
)
外形尺寸
598
(宽)
×427
(深)
×490
(高)
mm, 125L
概略质量
75 kg
以下(可内置外部
3
轴)
*
冷却方式 间接冷却
周围温度 通常时 :
0
℃
~+45
℃
保管时 :
-10
℃
~+60
℃
相对湿度
90%
以下(无结露)
标高
2000 m (
但会存在温度延迟)
(注)标高
1000m
以上的条件 :按周围最高温度每上升
100m
减少
1%
电源规格
三相
AC200V~240V
(
+10% ~ -15%
)
50/60Hz
(
±2%
)
三相
AC380V~480V
(
+10% ~ -15%
)
50/60Hz
(
±2%
)
(中性点接地)
控制柜型号不同,可连接的电源规格也不相同。
接地
AC200V~240V
规格 :根据
GB T50065
交流电气装置的接地设计规格,按照低压电气装置的接地进行连接。
AC380V~480V
规格 :根据
GB T50065
交流电气装置的接地设计规格,按照低压电气装置的接地进行连接。
输入输出信号
专用信号 :输入
19
,输出
6
通用信号 :输入
40
,输出
40
(晶体管输出
32
,继电器输出
8
)
位置控制方式 串行通信方式(绝对值编码器)
储存容量
JOB
:
200,000
程序点,
10,000
机器人命令
CIO
梯形图
:
最大
20,000
程序点
扩张插槽
PCI express: 2
插槽
LAN
(上位连接)
2 (10BASE-T/100BASE-TX)
串口
I/F RS-232C: 1ch
控制方式 软件伺服
驱动单元
AC
伺服用伺服包
项目 规格
外形尺寸
152 (W)×49.5 (D)×300 (H) mm
概略质量
0.730 kg
材质 强化塑料
操作设备
选择键,轴操作键,数值
/
应用建,带钥匙切换模式键(示教模式、再现模式、远程模式)
急停键,使 能 键,
SD
卡
I/F
装 置(
SD
卡为选配 ),
USB
端 口(
USB2.0 1
接口)
显示屏
5.7
英寸
TFT
彩色液晶触摸屏
VGA
(
640×480
像素)
(汉字、平假名、片假名、英文、数字、其他)
保护等级
IP54
电缆长度 标准
: 8 m,
最 大( 选配):
36m
(追加延长电缆)
■
机器人控制柜
YRC1000
规格
■
编程示教器规格
适用机型
MOTOMAN-GP7,-GP8, -GP12, GP25