20201214104315.pdf - 第5页
4 S o lution 1 M OT O MA N - G P S e rie s 紧凑、更高速的 GP 系列: GP7 , GP8 更高速的 GP 系列: GP12, GP25 以更高的可搬质量、速度、手腕轴容许力矩实现高搬运能力 · 通过更高的可搬质量( 7kg/8kg )和提高 38% 的手腕轴容许负载力矩可搭载各种搬运工件及抓手 · 实现全轴高速化(提高最大 39% ) · 通过改善加减速控制,无论姿势缩短加减速时间至极限 以…

3
减少
设置时间
客户需求
GP
抓取、整列 打磨
S o lutio n
MOTOMAN
-
GP Series
装置内、装置间搬运 组装
机器人系统解决方案
MOTOMAN
-
GP
系列
YRC1000
YRC1000micro
Solution 2
提高生产性
Solution 3
Solution 1
MOTOMAN
-
GP 系列
GP25 YRC1000 YRC1000microGP7 GP8 GP12
由技术先进的机器人系统
智能地解决生产现场的困扰
提高生产性
设备标准化
提高安装、
运行、维护的效率
提高作业效率
使设备更紧凑
减少设备
设置和维护的
作业步骤
追寻的答案就在安川
以丰富的功能和构成回应客户的需求
适用例
大型长工件、汽车悬架、建设机械 、农业机械、
造船、铁骨等(应用事例P4、5)
整体解决方案
GP 系列机器人
机器人控制柜
精密嵌合
圆弧
4
S o lution
1
MOTOMAN
-
GP Series
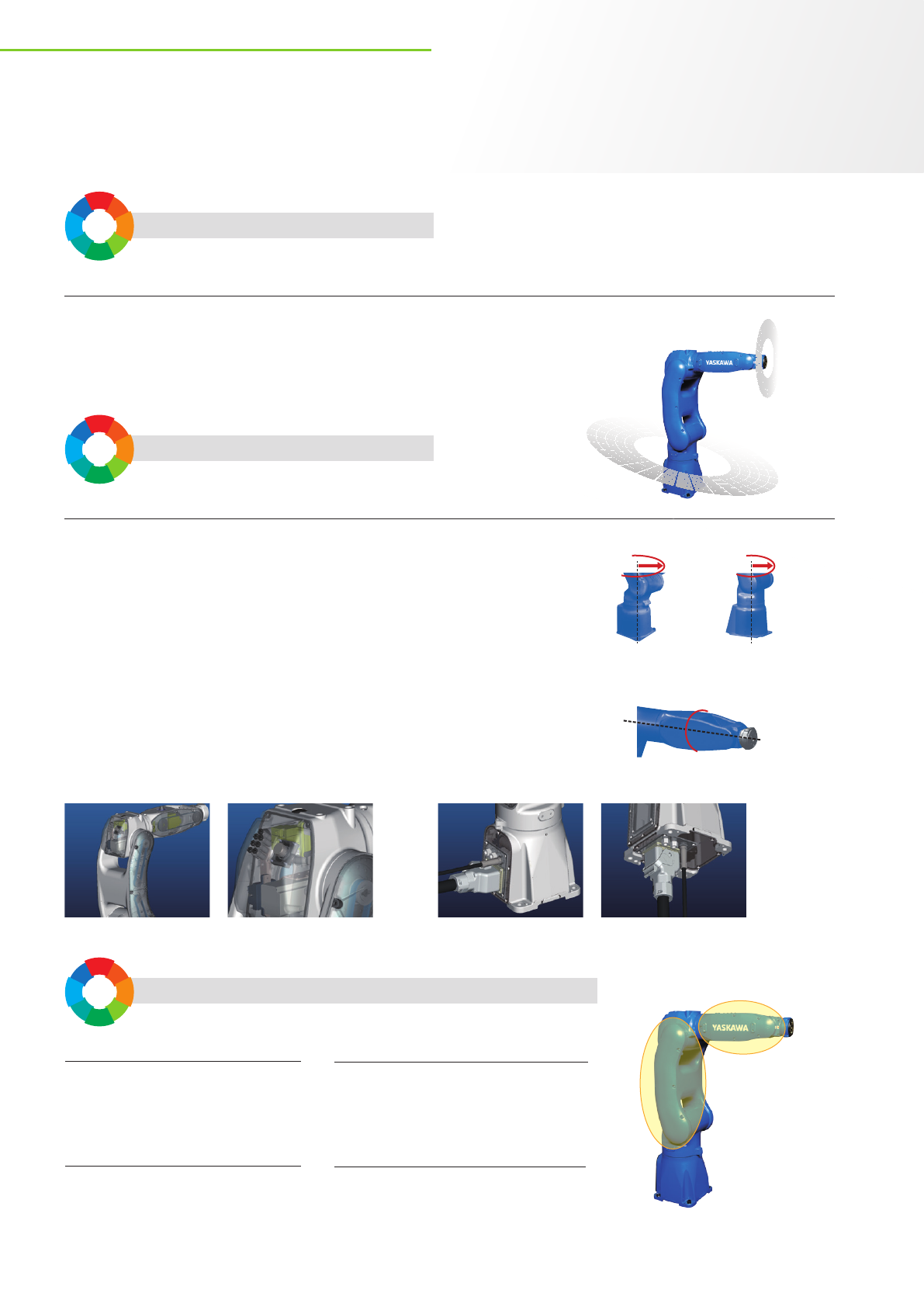
紧凑、更高速的GP系列:
GP7, GP8
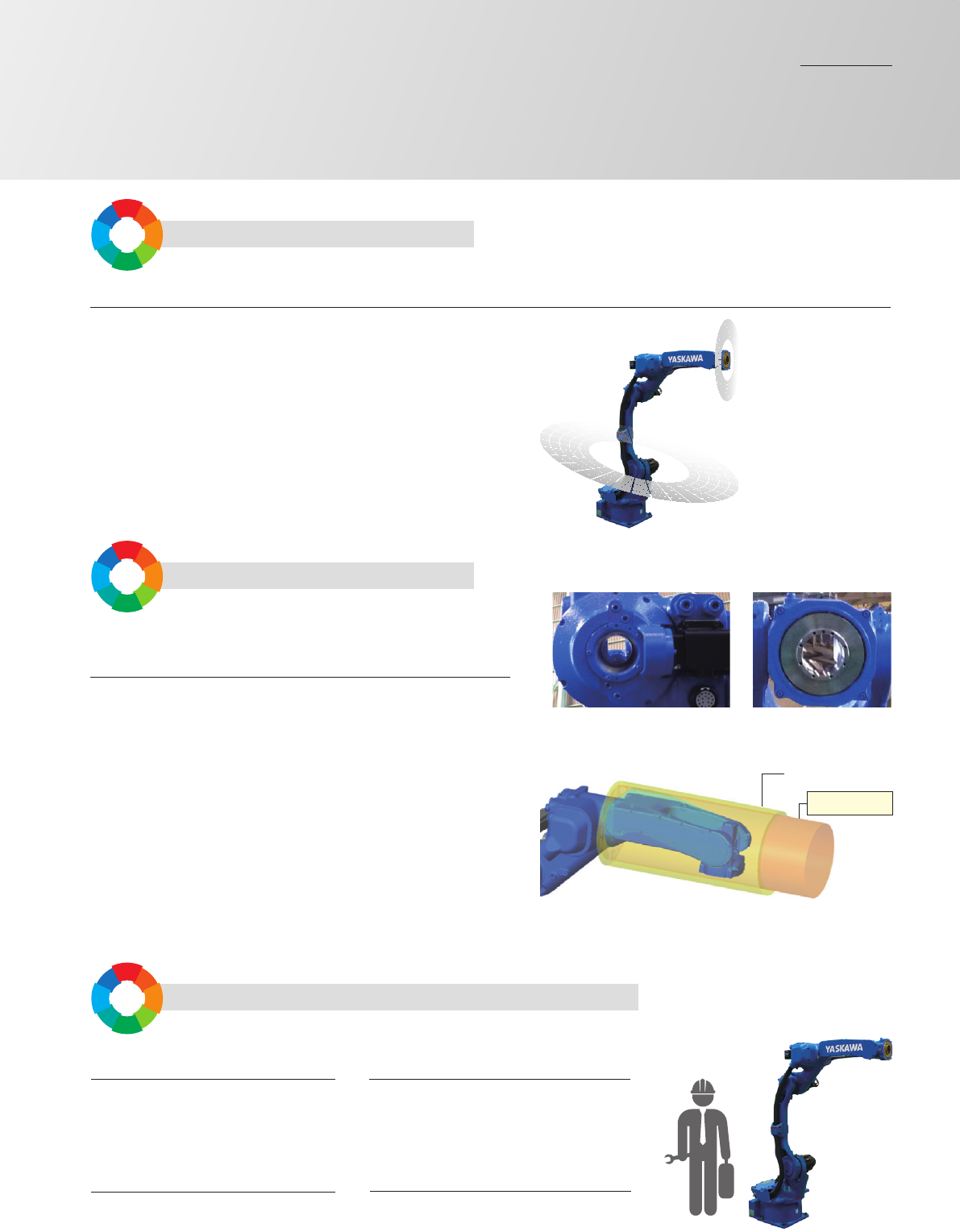
更高速的GP系列:
GP12, GP25
以更高的可搬质量、速度、手腕轴容许力矩实现高搬运能力
·
通过更高的可搬质量(7kg/8kg)和提高38%的手腕轴容许负载力矩可搭载各种搬运工件及抓手
·
实现全轴高速化(提高最大39%)
·
通过改善加减速控制,无论姿势缩短加减速时间至极限
以更高的可搬质量、速度、手腕轴容许力矩实现高搬运能力
·
实现高可搬质量(12kg/25kg)和更高速的动作性能,
为客户提高生产性作出贡献
·
通过改善加减速控制,无关姿势缩短加减速时间至极限
·
高可搬质量可搭载重物及双抓手
手腕部的干涉半径最小化
·
实现细长本体的更小限度的设置空间(L、U轴偏置更小)
·
供电电缆可从底侧伸出,与侧面伸出相比和墙壁间的干涉减少
·
通过提高最大臂展和行程,可对应广范围作业空间
·
左右对称的直线手臂设计,狭小空间内也可将与周边设备的干涉限制在更小
·
手臂内可内置三连电磁阀(选项),可开放L臂的V字部,减少动作限制
耐环境性优秀的手腕构造
·
手腕轴保护等级IP67
设置简单
·
仅需一根供电电缆,缩短设置时间
高环境性能
·
本体、手腕轴保护等级IP67,可有效
对应粉尘、冷却液
便于清洁的设计
·
表面不易于附着粉尘
维护简便
·
更换机内电缆时无需连接电池即可保持
原点数据
·
通过减少电缆、接头数量提高作业性
削减配线工数
·
仅需一根供电电缆,减少配线工数
削减配线工数
·
仅需一根供电电缆,减少配线工数
维护简便
弧形外观
光滑表面
手臂内可内置三连电磁阀(选项) 供电电缆侧面伸出和地面伸出(选项)
现有机型:
MH5(L)SⅡ
干涉半径73mm
新机型:GP7, GP8 干涉半径67mm
现有机型:MH5(L)SⅡ
干涉半径182mm
新机型:GP7, GP8
干涉半径140mm
■
减少手腕部旋转时的干涉半径
■
减少S轴旋转时的干涉半径
■
中空手臂构造
■
减少干涉领域
原有机型
R轴 中空 Φ50 mm
T轴 中空 Φ50 mm
现有机型: MH
12 干涉半径138mm
MH
24 干涉半径147mm
新机型: GP12 干涉半径120mm
GP25 干涉半径138mm
新机型
*GP25最大速度与
现有机型相比提高
最大30%
提高生产性
提高生产性
使设备更紧凑
使设备更紧凑
提高安装、运行、维护效率
提高安装、运行、维护效率
通过细长的中空手臂构造减少干涉
通过可内置电缆的中空手臂构造,减少干涉造成的动作限制,
排除断线,使示教简易化
细长的手腕部及使用了曲线的手臂形状,减少与周边设备的干涉
·
·
*
:
GP12的最大速度臂现有机型提高最大15%
Sol ution
1
客户需求
客户需求
客户需求
客户需求
实现缩小设置空间的细长并易使用的本体、手臂构造
客户需求
客户需求
·
更换机内电缆时无需连接电池即可保持
原点数据
·
通过减少电缆、接头数量提高作业性
5
S o lution
1
MOTOMAN
-
GP Series
紧凑、更高速的GP系列:
GP7, GP8
更高速的GP系列:
GP12, GP25
以更高的可搬质量、速度、手腕轴容许力矩实现高搬运能力
·
通过更高的可搬质量(7kg/8kg)和提高38%的手腕轴容许负载力矩可搭载各种搬运工件及抓手
·
实现全轴高速化(提高最大39%)
·
通过改善加减速控制,无论姿势缩短加减速时间至极限
以更高的可搬质量、速度、手腕轴容许力矩实现高搬运能力
·
实现高可搬质量(12kg/25kg)和更高速的动作性能,
为客户提高生产性作出贡献
·
通过改善加减速控制,无关姿势缩短加减速时间至极限
·
高可搬质量可搭载重物及双抓手
手腕部的干涉半径最小化
·
实现细长本体的更小限度的设置空间(L、U轴偏置更小)
·
供电电缆可从底侧伸出,与侧面伸出相比和墙壁间的干涉减少
·
通过提高最大臂展和行程,可对应广范围作业空间
·
左右对称的直线手臂设计,狭小空间内也可将与周边设备的干涉限制在更小
·
手臂内可内置三连电磁阀(选项),可开放L臂的V字部,减少动作限制
耐环境性优秀的手腕构造
·
手腕轴保护等级IP67
设置简单
·
仅需一根供电电缆,缩短设置时间
高环境性能
·
本体、手腕轴保护等级IP67,可有效
对应粉尘、冷却液
便于清洁的设计
·
表面不易于附着粉尘
维护简便
·
更换机内电缆时无需连接电池即可保持
原点数据
·
通过减少电缆、接头数量提高作业性
削减配线工数
·
仅需一根供电电缆,减少配线工数
削减配线工数
·
仅需一根供电电缆,减少配线工数
维护简便
弧形外观
光滑表面
手臂内可内置三连电磁阀(选项) 供电电缆侧面伸出和地面伸出(选项)
现有机型:
MH5(L)SⅡ
干涉半径73mm
新机型:GP7, GP8 干涉半径67mm
现有机型:MH5(L)SⅡ
干涉半径182mm
新机型:GP7, GP8
干涉半径140mm
■
减少手腕部旋转时的干涉半径
■
减少S轴旋转时的干涉半径
■
中空手臂构造
■
减少干涉领域
原有机型
R轴 中空 Φ50 mm
T轴 中空 Φ50 mm
现有机型: MH
12 干涉半径138mm
MH
24 干涉半径147mm
新机型: GP12 干涉半径120mm
GP25 干涉半径138mm
新机型
*GP25最大速度与
现有机型相比提高
最大30%
提高生产性
提高生产性
使设备更紧凑
使设备更紧凑
提高安装、运行、维护效率
提高安装、运行、维护效率
通过细长的中空手臂构造减少干涉
通过可内置电缆的中空手臂构造,减少干涉造成的动作限制,
排除断线,使示教简易化
细长的手腕部及使用了曲线的手臂形状,减少与周边设备的干涉
·
·
*
:
GP12的最大速度臂现有机型提高最大15%
Sol ution
1
客户需求
客户需求
客户需求
客户需求
实现缩小设置空间的细长并易使用的本体、手臂构造
客户需求
客户需求
·
更换机内电缆时无需连接电池即可保持
原点数据
·
通过减少电缆、接头数量提高作业性