00197013-04_UM_X-Serie-S_ET.pdf - 第132页
3 Tehnilised andmed ja sõlmed Kasutusjuhend SIPLACE X-Seeria 3.5 Ladumispea Alates tarkvaraversioonist 706.1 SP1 Versioon 10/2014 132 3 Jn 3.5 - 2 SIPLACE SpeedSt ar - funktsioonigrupid osa 2 (1) C&P- komponendikaame…
Kasutusjuhend SIPLACE X-Seeria 3 Tehnilised andmed ja sõlmed
Alates tarkvaraversioonist 706.1 SP1 Versioon 10/2014 3.5 Ladumispea
131
3.5 Ladumispea
3.5.1 SIPLACE SpeedStar C&P20 kiireks ladumiseks
3
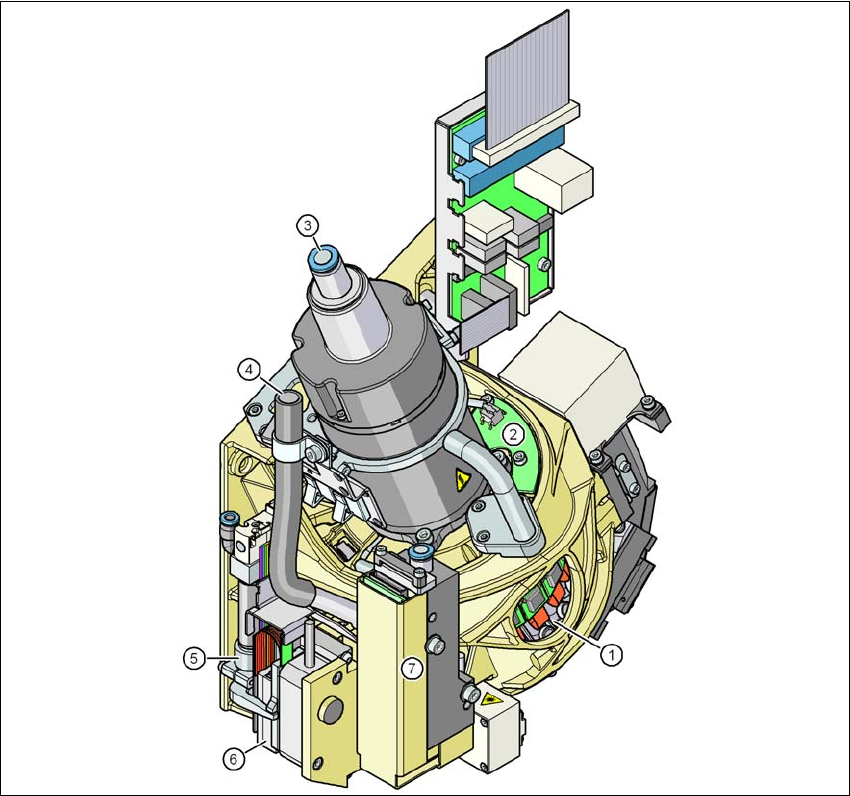
Jn 3.5 - 1 SIPLACE SpeedStar - funktsioonigrupid osa 1
(1) DP-ajam, 20 ajamit
(2) „Vaakumanduri hoideahela" plaat
(3) Suruõhuühendus 20 venturidüüsidele haaramis-/ladumis- ja hoideahelas
(4) Rõhureguleerimisventiili (7) heitõhutoru
(5) Tagastussilinder
(6) Z-mootor (lineaarmootor)
(7) Rõhureguleerimisventiil
3 Tehnilised andmed ja sõlmed Kasutusjuhend SIPLACE X-Seeria
3.5 Ladumispea Alates tarkvaraversioonist 706.1 SP1 Versioon 10/2014
132
3
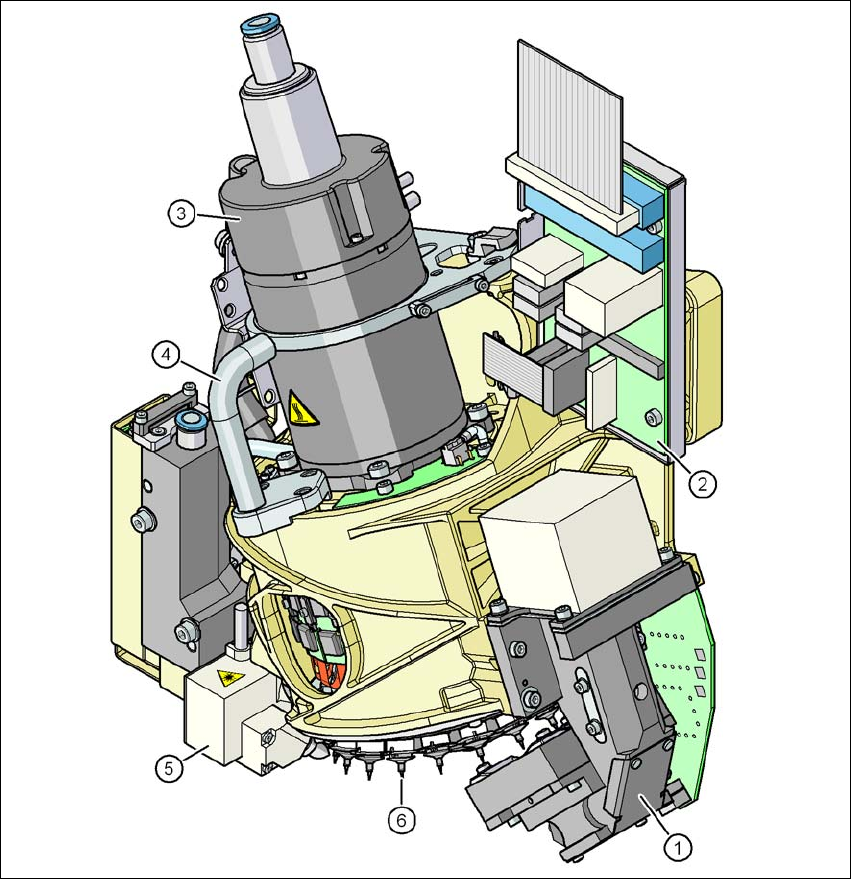
Jn 3.5 - 2 SIPLACE SpeedStar - funktsioonigrupid osa 2
(1) C&P- komponendikaamera, tüüp 23, 6 x 6, digitaalne
(2) Vahejaoturi trükkplaat
(3) Tähemootor
(4) Käepide
(5) Komponendiandur
(6) Täht 20 imiotsakuga
Kasutusjuhend SIPLACE X-Seeria 3 Tehnilised andmed ja sõlmed
Alates tarkvaraversioonist 706.1 SP1 Versioon 10/2014 3.5 Ladumispea
133
3.5.1.1 Kirjeldus
SIPLACE SpeedStar (C&P20) töötab Collect&Place-põhimõttel, st ühe tsükli vältel haarab ladu-
mispea kakskümmend komponenti. Haaramis- ja ladumisasendis kontrollib komponendisensor
imiotsakul komponendi olemasolu. Ladumisasendisse liikumisel tsentreeritakse komponent opti-
liselt ning pööratakse ladumisasendile vastava nurga alla. Lõpuks asetatakse komponent õhujoa
abil õrnalt ja täpselt trükkplaadile.
C&P20-tööpea abil õnnestus ladumispea ja koos sellega ladumisautomaadi jõudlust ulatuslikult
tõsta. C&P20-tööpea kompaktne koosteviis võimaldab ka väga lühikesi tsükliaegu. Seejuures
paikneb tähetelg trükkplaadi tasandi suhtes kaldu. Selline geomeetria võimaldab paigutada seg-
mente kitsaimasse ruumi.
Komponendikaamera on ka edaspidi C&P20-tööpeasse integreeritud. Võrreldes väliste tsent-
reerimiskaameratega on antud juhul liikumisteekond oluliselt lühem. Iga segment omab imiotsaku
pööramiseks ka isiklikku DP-ajamit. Seetõttu pole vaja imiotsakuid õigesse asendisse pöörata ük-
siku tööpeajaama pööramisega. Need pööratakse õigesse ladumisasendisse suvalisel ajal üks-
teisest sõltumatult.
Igal segmendil on eraldi vaakumgeneraator. See vähendab oluliselt vaakumi ja õhuvoolu ümber-
lülitamiseks kuluvat aega. Nii saab kontrollida ka igas imiotsakus hoideahela poolt tekitatavat vaa-
kumit.
Segmentide Z-mootorina kasutatakse lineaarmootorit koos lineaarse nihkemõõtmissüsteemiga,
mis tagab äärmiselt suure täpsuse. Haaramis- ja ladumisasendis nihutab Z-ajam segmente verti-
kaalsuunas üles või alla.