TK25947.晹昳擣幆僨乕僞帺摦嶌惉.pdf - 第5页
ヤマハ発動機株式会社 IM 事業部 マウンター技術部 ソフト開発グループ MDOC-SOFT50408 5/8 部品の場合は、スマート認識機能を利用してください。 (a) 部品全体が画像に収まっていない場合は、「外形寸法 X」、「 外形寸法 Y」を大きくする。 (b) 画像のピントが合っていない場合は 、「外形寸法 部品厚さ」を変更する 。 (c) 補正タイプを手動選択し、寸法のみを自動作成す…
ヤマハ発動機株式会社 IM 事業部
マウンター技術部 ソフト開発グループ
MDOC-SOFT50408
4/8
(オペレータレベル編集画面の[部品]–[ポチ 適正値検索対象])
どの補正タイプを選べばよいか分からない場合は、下記の手順で補正タイプ及び寸法を自動
作成してください。
[部品] 画面で作成対象の部品データを選択し、以下の情報を入力します。
[基本] タブ ・・・ 「使用ノズル」、「部品供給形態」、「テープ種類」 など
[吸着] タブ ・・・ 「フィーダーセット位置」 など
[形状] タブ ・・・ 「外形寸法 X」、「外形寸法 Y」、「外形寸法 部品厚さ」
* 「外形寸法 X」 及び 「外形寸法 Y」 は、大まかなカメラの撮像範囲を決めるためですので、
正確な値でなくて構いません。
* 最初の撮像は、常にメイン照明及び同軸照明 ON、部品照明レベル 7/8 で実行されますので、
照明関係の設定は不要です。
[部品ポチ] ボタンをクリックして部品ポチ画面を開き、使用するヘッド番号を指定し、[吸着] ボ
タンをクリックし、ヘッドに部品を吸着させます。
[適正値検索対象] で 「タイプ,寸法,照明」 を選択し、[適正値検索] ボタンをクリックします。
部品画像から補正タイプや外形寸法などが自動的に決定され、照明レベルや部品しきい値な
どのパラメータが適正な値にチューニングされます。
結果表示欄に「部品の適正値検索に成功しました」と表示されれば、成功です。
適正値検索などの外形寸法等の値は、上部のグリッドで確認することができます(結果表示欄
には外形寸法等の変化は表示されません)。また、モニタモードが自動的に「定義形状表示」に
変わり、ビジョンウィンドウで部品認識画像と部品定義形状をオーバーレイ表示で確認すること
ができます。
もし失敗した場合は以下の方法を試してみてください。また、既存アルゴリズムで定義できない
ヤマハ発動機株式会社 IM 事業部
マウンター技術部 ソフト開発グループ
MDOC-SOFT50408
5/8
部品の場合は、スマート認識機能を利用してください。
(a) 部品全体が画像に収まっていない場合は、「外形寸法 X」、「外形寸法 Y」を大きくする。
(b) 画像のピントが合っていない場合は、「外形寸法 部品厚さ」を変更する。
(c) 補正タイプを手動選択し、寸法のみを自動作成する。(3.2 参照)
補正タイプは変更せずに、部品外形寸法やリード情報だけを作成したい場合は、下記の手順で
寸法を自動作成してください。
[部品] 画面で作成対象の部品データを選択し、以下の情報を入力します。
[基本] タブ ・・・ 「使用ノズル」、「部品供給形態」、「テープ種類」 など
[吸着] タブ ・・・ 「フィーダーセット位置」 など
[形状] タブ ・・・ 「外形寸法 X」、「外形寸法 Y」、「外形寸法 部品厚さ」
* 「外形寸法 X」 及び 「外形寸法 Y」 は、大まかなカメラの撮像範囲を決めるためですので、
正確な値でなくて構いません。
* 最初の撮像は、常にメイン照明及び同軸照明 ON (補正タイプが簡易 BGA または BGA の場
合はサイド照明 ON)、部品照明レベル 7/8 で実行されますので、照明関係の設定は不要で
す。
[部品ポチ] ボタンをクリックして部品ポチ画面を開き、使用するヘッド番号を指定し、[吸着] ボ
タンをクリックし、ヘッドに部品を吸着させます。
[適正値検索対象] で 「寸法,照明」 を選択し、[適正値検索] ボタンをクリックします。
部品画像から外形寸法等が自動的に決定され、照明レベルや部品しきい値等のパラメータが
適正な値にチューニングされます。
結果表示欄に 「部品の適正値検索に成功しました」 と表示されれば、成功です。
適正値検索後の外形寸法等の値は、上部のグリッドで確認することができます(結果表示欄に
は外形寸法等の変化は表示されません)。また、モニタモードが自動的に 「定義形状表示」 に
変わり、ビジョンウィンドウで部品認識画像と部品定義形状をオーバーレイ表示で確認すること
ができます。
ヤマハ発動機株式会社 IM 事業部
マウンター技術部 ソフト開発グループ
MDOC-SOFT50408
6/8
もし失敗した場合は以下の方法を試してみてください。また、既存アルゴリズムで定義できない
部品の場合は、スマート認識機能を利用してください。
(a) 部品全体が画像に収まっていない場合は、「外形寸法 X」、「外形寸法 Y」を大きくする。
(b) 画像のピントが合っていない場合は、「外形寸法 部品厚さ」を変更する。
(c) 補正タイプも自動作成の対象とする。(3.1 参照)
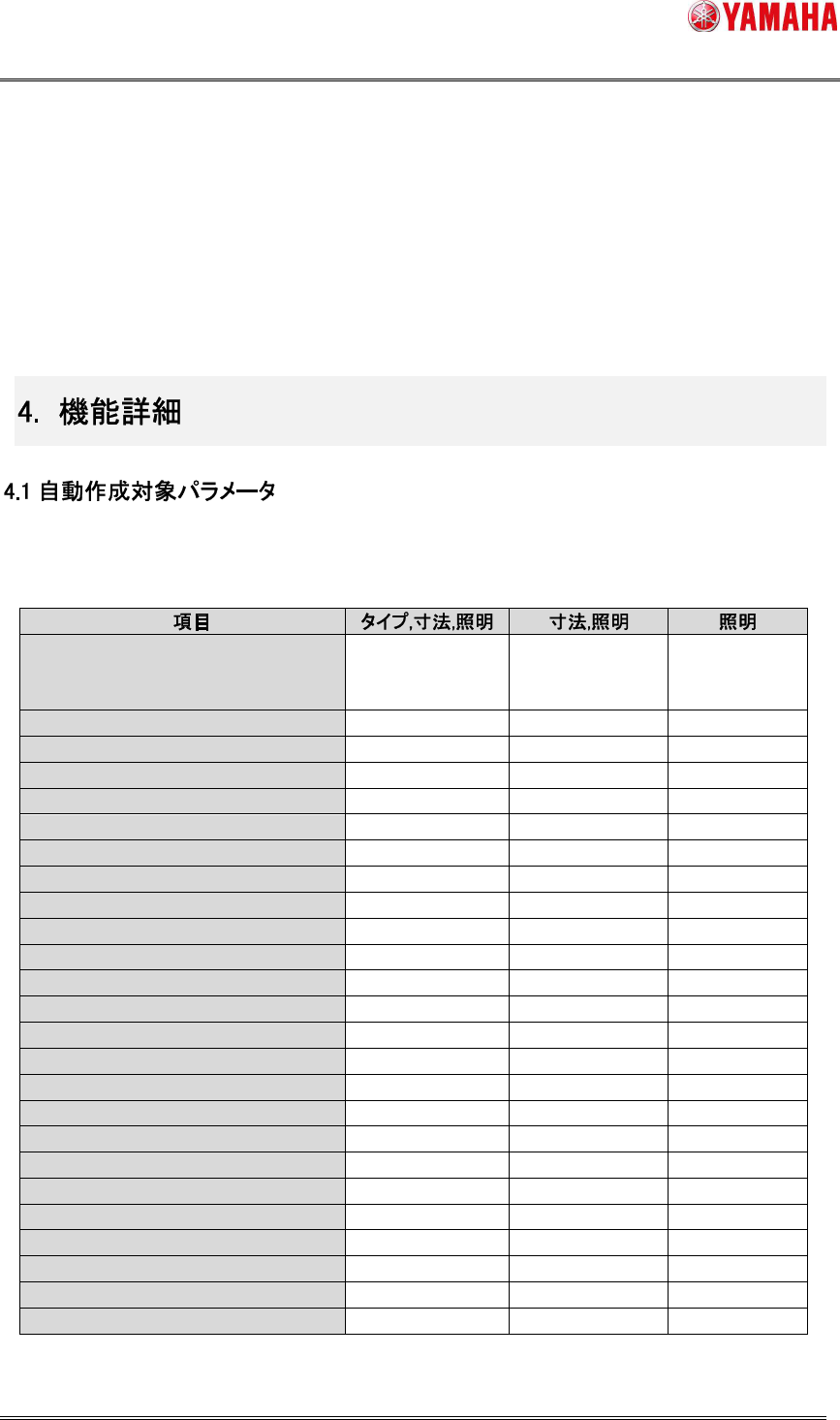
[適正値検索対象] 設定と自動作成対象パラメータは、下表のとおりです。
表 3 「適正値検索対象」 設定と自動作成対象パラメータ
[認識]–[特殊照明設定 メイン]
[認識]–[特殊照明設定 同軸]
[認識]–[特殊照明設定 サイド]
O(*1) O(*1) X
[認識]–[部品照明レベル] O O O
[認識]–[部品しきい値] O O O
[認識]–[公差] O O X
[認識]–[リード検出範囲] O O O
[認識]–[3D しきい値] O(*2) O(*2) O(*2)
[認識]–[3D メイン照明レベル] O(*2) O(*2) O(*2)
[認識]–[3D 同軸照明レベル] O(*2) O(*2) O(*2)
[認識]–[3D サイド照明レベル] O(*2) O(*2) O(*2)
[認識]–[3D 輝点部面積] O(*2) O(*2) O(*2)
[形状]–[補正タイプ] O X X
[形状]–[ベース補正タイプ] O X X
[形状]–[アルゴリズム] O X X
[形状]–[外形寸法 X] O O X
[形状]–[外形寸法 Y] O O X
[形状]–[検出ライン位置(NSEW)] O O O
[形状]–[検出ライン幅] O O X
[形状]–[リードグループ数(NSEW)] O O X
[形状]–[リード本数(NSEW)] O O X
[形状]–[リードピッチ(NSEW)] O O X
[形状]–[リード幅(NSEW)] O O O(*3)
[形状]–[反射リード長(NSEW)] O O X
[形状]–[検出位置 X(NSEW)] O O X
[形状]–[検出位置 Y(NSEW)] O O X
[形状]–[認識オプション(1~4)] O O X
(*1) BGA 部品の場合、サイド照明の方が適していれば、サイド照明 ON となります。