20201214133718.pdf - 第4页
电缆内置 T 轴中空 丰富的产品阵容 构筑更适合的码垛系统 借助适用高速的低惯性 AC 伺服马达和最新的控制技术 ,实现更高速度,实现节拍时间的缩短。 另外,通过 L 臂和 U 臂长度的更佳搭配,实现了同级别 中更大的码垛范围。 自动生成码垛程序 轻松确认码垛状态 轻松选择及更换作业内容 机器人本体 码垛专用软件 MOTOPAL MOTOP AL 是在示教器上操作,支援码垛作业的软件, 有利于缩短设置时间,提高作业效率。 更高速、更大动…

电缆内置
T轴中空
丰富的产品阵容
构筑更适合的码垛系统
借助适用高速的低惯性AC伺服马达和最新的控制技术
,实现更高速度,实现节拍时间的缩短。
另外,通过L臂和U臂长度的更佳搭配,实现了同级别
中更大的码垛范围。
自动生成码垛程序
轻松确认码垛状态
轻松选择及更换作业内容
机器人本体
码垛专用软件 MOTOPAL
MOTOPAL是在示教器上操作,支援码垛作业的软件,
有利于缩短设置时间,提高作业效率。
更高速、更大动作范围,为提高生产性
做出贡献。
-
中空构造的T轴(手腕轴)可内置抓手电缆。
实现了无缠绕的电缆配线,并避免抓手和周边设备产
生干涉。
通过采用中空构造
*1
,避免抓手电缆故障
MPL80
80 kg
2363 mm
(1600 mm
×
1600 mm时)
MOTOMAN
-
MPL100
100 kg
MPL160
160 kg
MPL300
300 kg
MPL500
500 kg
MPL800
800 kg
800 循环/小时
2061 mm 2150 mm 3159 mm
节省空间
高性能控制柜及选项功能,设备省空间化
高生产性
借助更优化码垛用途的性能、构造、专用工具,提高生产力。
码垛用途机器人产品线
上下动作
400 mm
旋转角度
60°
水平动作
2000 mm
*
1
:
不包括 MOTOMAN
-
MPL80 , MPL100 .
*
2
:
根据工件、抓手、布局等各条件结果不同。
选项
负载
最大臂展
处理能力
*2
(搬运、动作条件)
最大堆积高度
(工作台条件)
搬运与各机种负载相同的重量
动作模式 搬运重量
1740 mm
(1100
mm
×
1100
mm时)
2440 mm
(1219
mm
×
1219
mm时)
DX200是集成了现有的应用技术的矮型机器人控制柜。
原来安装外部3轴用AC伺服包等需要附加柜,现在可以作为选项功能内置。
实现了控制柜体积减小最大可达50%。同时通过速度限制功能及工具切换
监控功能等,提高了功能安全性能,强化了安全功能。
通过2重CPU构成的“功能安全模组”监控机器人和工具位置,将工具动作限制在合适的范围内。由此,可以
设置比机器人动作范围更狭小的安全围栏,实现生产设备的省空间化。
机器人控制柜 DX200
安全围栏最小化
选项
A
B
B
C
平面监控:
机器人不超过平面、斜面天顶
C
A
B
异常内容
发生原因
发生报警时,示教器上将显示异常内容、原因、对策,
在发生问题时提供解决方案。
故障排除 缩短部件更换时间
轻松维护
通过显示屏、故障排除、构造上的改善缩短了维护时间及故障时的复原时间。
减小最大50%
容积比
假想限制区域
+
安全围栏
安全围栏
现有安全围栏位置
机器人动作区域
【现有】机器人动作区域外
需要安全围栏
【功能安全】可省空间化
同时监控
三个区域,
缩短设定时间
A
B C
区域外监控:
机器人不进入该区域
区域内监控:
机器人不超出
该区域
对策
*
3
:
对应的机器人机型请向营业窗口咨询。
2 3
1570 循环/小时 1650 循环/小时 1200 循环/小时
750 循环/小时
710 循环/小时
缩短了控制柜的部件更换时间、故障发生后的复原时间。
(更换时间10分钟→8分钟:减少20%)
同时,由于编码器以单元模式进行更换,可使用一般
工具作业,缩短了作业时间。
另外,通过活用校零功能(选项),电机、编码器更换
时丢失的原点位置可在短时间内正确复原。

电缆内置
T轴中空
丰富的产品阵容
构筑更适合的码垛系统
借助适用高速的低惯性AC伺服马达和最新的控制技术
,实现更高速度,实现节拍时间的缩短。
另外,通过L臂和U臂长度的更佳搭配,实现了同级别
中更大的码垛范围。
自动生成码垛程序
轻松确认码垛状态
轻松选择及更换作业内容
机器人本体
码垛专用软件 MOTOPAL
MOTOPAL是在示教器上操作,支援码垛作业的软件,
有利于缩短设置时间,提高作业效率。
更高速、更大动作范围,为提高生产性
做出贡献。
-
中空构造的T轴(手腕轴)可内置抓手电缆。
实现了无缠绕的电缆配线,并避免抓手和周边设备产
生干涉。
通过采用中空构造
*1
,避免抓手电缆故障
MPL80
80 kg
2363 mm
(1600 mm
×
1600 mm时)
MOTOMAN
-
MPL100
100 kg
MPL160
160 kg
MPL300
300 kg
MPL500
500 kg
MPL800
800 kg
800 循环/小时
2061 mm 2150 mm 3159 mm
节省空间
高性能控制柜及选项功能,设备省空间化
高生产性
借助更优化码垛用途的性能、构造、专用工具,提高生产力。
码垛用途机器人产品线
上下动作
400 mm
旋转角度
60°
水平动作
2000 mm
*
1
:
不包括 MOTOMAN
-
MPL80 , MPL100 .
*
2
:
根据工件、抓手、布局等各条件结果不同。
选项
负载
最大臂展
处理能力
*2
(搬运、动作条件)
最大堆积高度
(工作台条件)
搬运与各机种负载相同的重量
动作模式 搬运重量
1740 mm
(1100
mm
×
1100
mm时)
2440 mm
(1219
mm
×
1219
mm时)
DX200是集成了现有的应用技术的矮型机器人控制柜。
原来安装外部3轴用AC伺服包等需要附加柜,现在可以作为选项功能内置。
实现了控制柜体积减小最大可达50%。同时通过速度限制功能及工具切换
监控功能等,提高了功能安全性能,强化了安全功能。
通过2重CPU构成的“功能安全模组”监控机器人和工具位置,将工具动作限制在合适的范围内。由此,可以
设置比机器人动作范围更狭小的安全围栏,实现生产设备的省空间化。
机器人控制柜 DX200
安全围栏最小化
选项
A
B
B
C
平面监控:
机器人不超过平面、斜面天顶
C
A
B
异常内容
发生原因
发生报警时,示教器上将显示异常内容、原因、对策,
在发生问题时提供解决方案。
故障排除 缩短部件更换时间
轻松维护
通过显示屏、故障排除、构造上的改善缩短了维护时间及故障时的复原时间。
减小最大50%
容积比
假想限制区域
+
安全围栏
安全围栏
现有安全围栏位置
机器人动作区域
【现有】机器人动作区域外
需要安全围栏
【功能安全】可省空间化
同时监控
三个区域,
缩短设定时间
A
B C
区域外监控:
机器人不进入该区域
区域内监控:
机器人不超出
该区域
对策
*
3
:
对应的机器人机型请向营业窗口咨询。
2 3
1570 循环/小时 1650 循环/小时 1200 循环/小时
750 循环/小时
710 循环/小时
缩短了控制柜的部件更换时间、故障发生后的复原时间。
(更换时间10分钟→8分钟:减少20%)
同时,由于编码器以单元模式进行更换,可使用一般
工具作业,缩短了作业时间。
另外,通过活用校零功能(选项),电机、编码器更换
时丢失的原点位置可在短时间内正确复原。
机器人规格
MOTOMAN
-
MPL80
YR
-
MPL0080
-
J00
垂直多关节型(5自由度)
80 kg
0.07 mm
−
180˚
~
+
180˚
−
90˚
~
+
135˚
−
160˚
~
+
35˚
−
15˚
~
+
15˚
*
3
−
360˚
~
+
360˚
2.97 rad/s, 170˚/s
2.97 rad/s, 170˚/s
2.97 rad/s, 170˚/s
2.97 rad/s, 170˚/s
6.11 rad/s, 350˚/s
容许力矩
容许惯性力矩
(GD²/4)
设置环境
78.4 N
m
20.5 N
m
16 kg
m
2
6.1 kg
m
2
550 kg
0˚C ~
+
45˚C
20% ~ 80%RH
(无结露)
4.9 m/s
2
以下
4.0 kVA
*
*
*
1
2
3
:
:
:
依照 ISO
9283。
因用途、动作而异。
B轴动作范围是对地角度。但由于上臂的相对角,部分姿势会有动作限制。
S轴(旋转)
L轴(下臂)
U轴(上臂)
B轴(手腕摆动)
T轴(手腕旋转)
温度
湿度
振动
其他
动作范围
最大速度
名称
型号
构造
负载
重复定位精度
*
1
电源容量
*
2
本体质量
(注)本表记载的是SI单位系。
MOTOMAN
-
MPL100
YR
-
MPL0100
-
J00
115
kg
(
100 kg
)
*
3
0.2 mm
−
180˚
~
+
180˚
−
60˚
~
+
76˚
−
147˚
~
+
40˚
−
15˚
~
+
15˚
*
4
−
360˚
~
+
360˚
(
−
210˚
~
+
210˚ kg
)
*
3
2.18 rad/s, 125˚/s
1.53 rad/s, 88˚/s
2.18 rad/s, 125˚/s
3.05 rad/s, 175˚/s
4.63 rad/s, 265˚/s
196 N
m
0 N
m
90 kg
m
2
(
88 kg
m
2
)
*
3
55 kg
m
2
950 kg
0˚C ~
+
45˚C
20 % ~ 80%RH(无结露)
4.9 m/s
2
以下
8.0 kVA
动作范围
最大速度
名称
型号
构造
负载
重复定位精度
*
1
电源容量
*
2
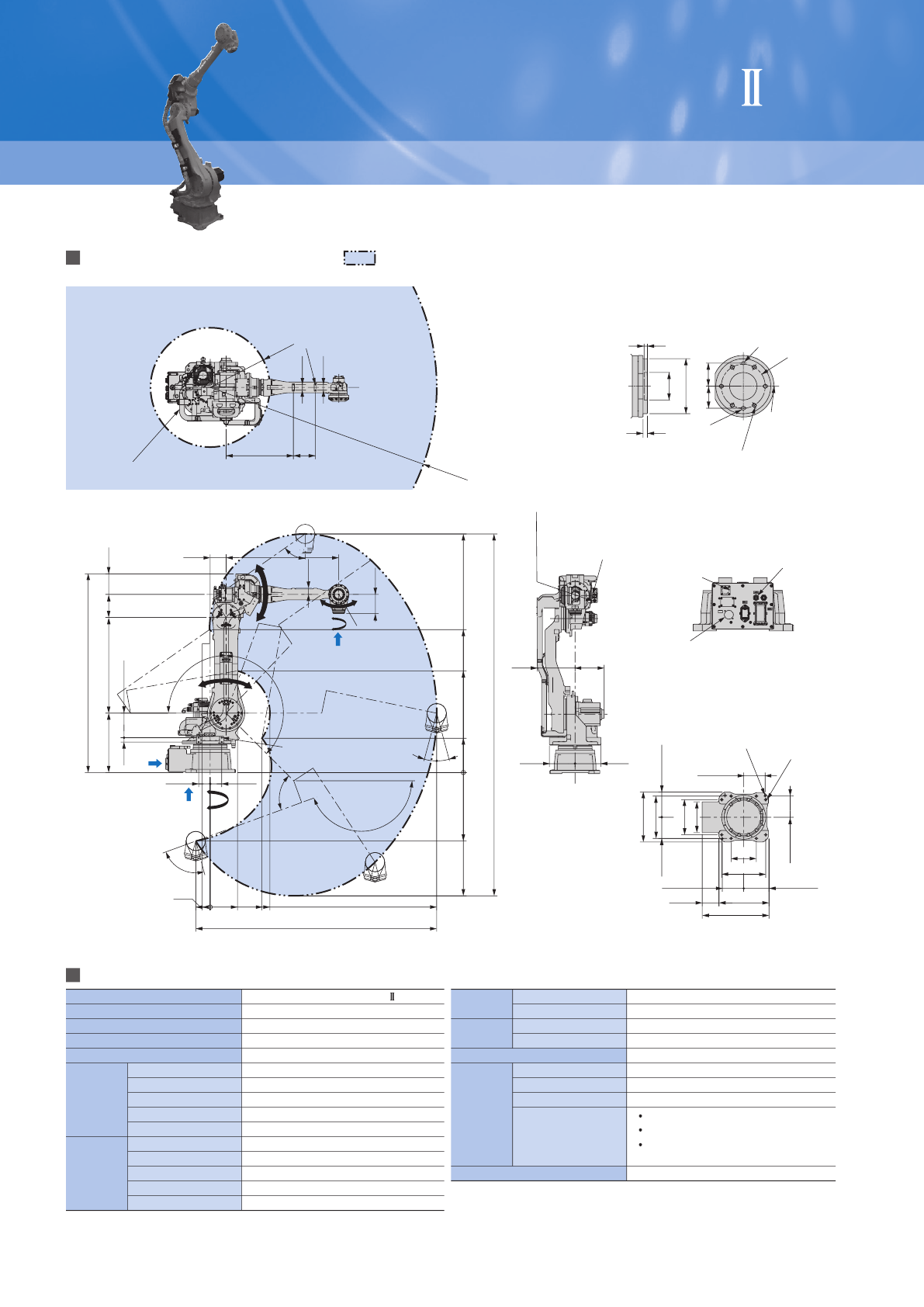
MOTOMAN-MPL80
负载80kg,最大臂展R2061mm
视角 A
视角 B
视角 C
MOTOMAN-MPL100
负载100kg,最大臂展R2150mm
视角 A
视角 B
视角 C
外形尺寸及动作范围 单位:mm
:
P点动作范围
无引火性或腐蚀性气体、液体
无水、油、粉尘等
远离电气性噪音源
容许力矩
容许惯性力矩
(
GD
2
/
4
)
设置环境
温度
湿度
振动
其他
本体质量
15
˚
15
˚
85
°
C
B
55
�
55°
装备电缆接头
JL
05
-
2A24
-
28PC
(带盖)
请准备配套侧接头
JL
05
-
6A24
-
28S
气体供给口 PT3/8孔
带管塞
3291
2170
1300
925
312
1121
623
2192
543
471248
6
131
2061
65
˚
160
˚
135
˚
90
˚
40 223.
5
57
105
105
175
1025
145
1807
187540 870 210
B
T
P点
U
L
S
4×M12×P1.75
深:20
234 234
343 253
装备电缆接头
JL
05
-
2
A
24
-
28
SC
(带盖)
请准备配套侧接头
JL
05
-
6
A
24
-
28
P
280
153 455
608
455
195
±
0
.
1
230
±
0
.
1
385
320
195
±
0
.
1
195
±
0.1
230
±
0.1195
±
0.1
230
400
0
0
8×Ø22
R
2702
*
装备电缆接头(基座侧)
JL
05
-
2A24
-
28PC
(
带帽)
请准备配套侧接头
JL
05
-
6A24
-
28S
Ø125
Ø92
8
8
30
˚
Ø160h6
Ø63
H7
320
420
500
290
450
295
±
0.1
230
±
0
.
1 230
±
0
.
1
250
±
0.1
185
±
0.1
185
±
0.1
420
500
R
713
27.5
12
.5 45
120
255
40
344
92
16
60
240
R
577
325 1225
650 300
P点
B
60
°
76
°
19
°
4
°
1150
2817
332
598
957
577
1441
562
762
713
709
2253
407
9
153
77
.
5
°
2150
2223
*
114
75
70
°
2702
2242
15
°
15
°
C
B
A
T
U
L
S
*
:
斜线部动作范围在负载70kg以下时有效。
(含电缆处理用法兰盘)
(
276
)
344
276 430
220
电缆处理用
法兰盘
R
2150
R
543
50
50
200
R
2061
611.5
Ø6H7
深:10
Ø8H7
深:14
Ø50 H7
Ø100h6
Ø80
6
8
T轴校准标记
40 42
A
气体入口 PT3/8孔
带管塞
4 5
外形尺寸及动作范围 单位:mm
:
T点动作范围
机器人规格
S轴(旋转)
L轴(下臂)
U轴(上臂)
B轴(手腕摆动)
T轴(手腕旋转)
T轴(手腕旋转)
T轴(手腕旋转)
B轴(手腕摆动)
B轴(手腕摆动)
S轴(旋转)
L轴(下臂)
U轴(上臂)
B轴(手腕摆动)
T轴(手腕旋转)
S轴(旋转)
L轴(下臂)
U轴(上臂)
B轴(手腕摆动)
T轴(手腕旋转)
T轴(手腕旋转)
B轴(手腕摆动)
B轴(手腕摆动)
T轴(手腕旋转)
无引火性或腐蚀性气体、液体
无水、油、粉尘等
远离电气性噪音源
*
*
*
1
2
3
:
:
:
依照 ISO
9283。
因用途、动作而异。
B轴动作范围是对地角度。但由于上臂的相对角,部分姿势会有动作限制。
(注)本表记载的是SI单位系。
垂直多关节型(5自由度)
4×M8孔×P1.25
深:16
6×M8×P1.25
深:14
2×Ø12H7
总线电缆管用
(内径Ø12)(配线结束管内)
2×Ø10H7(深:8)
2×Ø9H7(深:8)
6×M10(深:14)
6×M10(深:14)
4×M6孔(深:11)
4×M8孔(深:14)
2×M6孔(深:11)
4×M8孔(深:14)
2×M5孔(深:9)
总线电缆管用
(内径Ø12)(配线结束管内)
8×Ø22
2×Ø20H7
气体入口 Rc3/8孔
带管塞
总线电缆管
(内径Ø12)(基座内)
总线电缆用管
(内径Ø12)(基座内)
总线电缆用管
(内径Ø12)
(配线结束管内)
T点