20201214133718.pdf - 第8页
M O T O M A N -MPL 160 M O T O M A N -MPL 300 MOTOMAN - MPL 300 YR - MPL 0300 - J 00 300 kg 0 . 5 mm − 180 ˚ ~ + 180 ˚ − 45 ˚ ~ + 90 ˚ − 120 ˚ ~ + 15 . 5 ˚ − 360 ˚ ~ + 360 ˚ 1 . 57 rad/s, 90 ˚/s 1 . 75 rad/s, 100 ˚/s 1 .…
MOTOMAN-MPL160
MOTOMAN-MPL300
MOTOMAN
-
MPL300
YR
-
MPL0300
-
J00
300
kg
0.5 mm
−
180˚
~
+
180˚
−
45˚
~
+
90˚
−
120˚
~
+
15.5˚
−
360˚
~
+
360˚
1.57 rad/s, 90˚/s
1.75 rad/s, 100˚/s
1.92 rad/s, 110˚/s
3.40 rad/s, 195˚/s
140 kg
m
2
1820 kg
0˚C ~
+
45˚C
20% ~ 80%RH(无结露)
4.9 m/s
2
以下
8.0 kVA
MOTOMAN
-
MPL160
YR
-
MPL0160
-
J00
160
kg
0.5 mm
−
180˚
~
+
180˚
−
45˚
~
+
90˚
−
120˚
~
+
15.5˚
−
360˚
~
+
360˚
2.44 rad/s, 140˚/s
2.44 rad/s, 140˚/s
2.44 rad/s, 140˚/s
5.32 rad/s, 305˚/s
80 kg
m
2
1700 kg
0˚C ~
+
45˚C
20% ~ 80%RH(无结露)
4.9 m/s
2
8.0 kVA
机器人规格
*
2
*
2
温度
湿度
振动
其他
温度
湿度
振动
视角 A
视角 B
视角 C
U
L
S
R
1037
R
3159
T点
P点
125
2204
300
250
1400
0
820
31591037
R
697
880 1250
270
120
˚
90
˚
45
˚
2624
2363
1600
1600
1300
1300
2162614
2776
R1124
2529
15
.
5
˚
30
˚
18
8
540
220
±
0.1220
±
0.1
300
±
0
.
1320
±
0
.
1
360
±
0.1
320
±
0
.
1
360
±
0
.
1
540
640
640
1241
616
625
C
B
T
A
0
Ø63H7
Ø160h6
Ø12H7
ϕ
视角 A
视角 B
视角 C
1600
1600
1300
1300
R
1037
R
3159
R
697
Ø125
30
˚
8
18
1241
616
625
360
±
0
.
1
220
±
0
.
1
540
220
±
0
.
1
300
±
0.
1320
±
0.
1
360
±
0
.
1
320
±
0.1
540
640
640
C
B
L
L
T点
90
˚
45
˚
2162614
2776
R1124
15
.
5
°
120
°
2624
2363
2529
300
880 1250
2204
820
250
1400
0
31591037
270
S
U
T
A
0
Ø63H7
Ø160h6
P点
JL
05
-
2A24
-
28PC
(带盖)
JL
05
-
6A24
-
28S
JL
05
-
2A24
-
28PC(带盖)
JL
05
-
6A24
-
28S
气体入口
5
×
Rc3/8口 带外壳插头
(
A, B, C, D, E
)
A EDCB
EDCBA
6 7
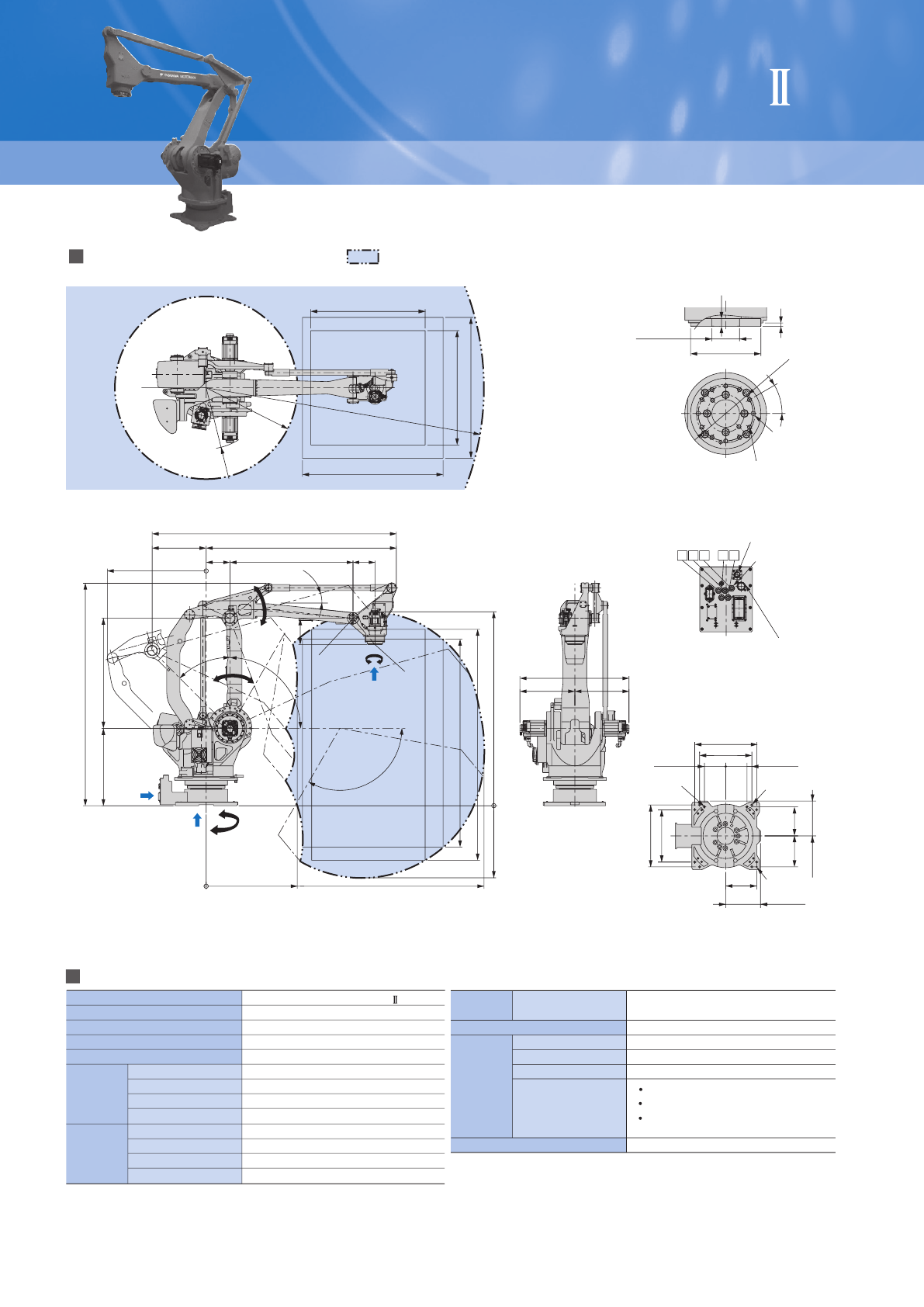
负载160kg,最大臂展R3159mm 负载300kg,最大臂展R3159mm
外形尺寸及动作范围 单位:mm
:
T点动作范围
外形尺寸及动作范围 单位:mm
:
T点动作范围
机器人规格
10×M10
深:16
2×Ø10H7
深:8
无引火性或腐蚀性气体、液体
无水、油、粉尘等
远离电气性噪音源
以下
1
2
:
:
依照 ISO
9283。
因用途、动作而异。
(注)本表记载的是SI单位系。
*
*
1
2
:
:
依照 ISO
9283。
因用途、动作而异。
(注)本表记载的是SI单位系。
*
*
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
动作范围
最大速度
名称
型号
构造
负载
重复定位精度
*
1
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
容许惯性力矩
(GD²/4)
T轴(手腕旋转)
本体质量
设置环境
其他
电源容量
垂直多关节型(4自由度)
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
动作范围
最大速度
名称
型号
构造
负载
重复定位精度
*
1
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
垂直多关节型(4自由度)
电源容量
设置环境
本体质量
容许惯性力矩
(GD²/4)
T轴(手腕旋转)
请准备配套侧接头
装备电缆接头(基座侧)
2×Ø20H7
8×Ø22
总线电缆用管
(内径Ø12)(基座内)
无引火性或腐蚀性气体、液体
无水、油、粉尘等
远离电气性噪音源
请准备配套侧接头
装备电缆接头(基座侧)
10×M10
深:16
2×Ø10H7
深:8
总线电缆用管
(内径Ø12)(基座内)
Ø12H7
2×Ø20H7
8×Ø22
气体入口
5
×
Rc3/8口 带管塞
(
A, B, C, D, E
)
MOTOMAN-MPL160
MOTOMAN-MPL300
MOTOMAN
-
MPL300
YR
-
MPL0300
-
J00
300
kg
0.5 mm
−
180˚
~
+
180˚
−
45˚
~
+
90˚
−
120˚
~
+
15.5˚
−
360˚
~
+
360˚
1.57 rad/s, 90˚/s
1.75 rad/s, 100˚/s
1.92 rad/s, 110˚/s
3.40 rad/s, 195˚/s
140 kg
m
2
1820 kg
0˚C ~
+
45˚C
20% ~ 80%RH(无结露)
4.9 m/s
2
以下
8.0 kVA
MOTOMAN
-
MPL160
YR
-
MPL0160
-
J00
160
kg
0.5 mm
−
180˚
~
+
180˚
−
45˚
~
+
90˚
−
120˚
~
+
15.5˚
−
360˚
~
+
360˚
2.44 rad/s, 140˚/s
2.44 rad/s, 140˚/s
2.44 rad/s, 140˚/s
5.32 rad/s, 305˚/s
80 kg
m
2
1700 kg
0˚C ~
+
45˚C
20% ~ 80%RH(无结露)
4.9 m/s
2
8.0 kVA
机器人规格
*
2
*
2
温度
湿度
振动
其他
温度
湿度
振动
视角 A
视角 B
视角 C
U
L
S
R
1037
R
3159
T点
P点
125
2204
300
250
1400
0
820
31591037
R
697
880 1250
270
120
˚
90
˚
45
˚
2624
2363
1600
1600
1300
1300
2162614
2776
R1124
2529
15
.
5
˚
30
˚
18
8
540
220
±
0.1220
±
0.1
300
±
0
.
1320
±
0
.
1
360
±
0.1
320
±
0
.
1
360
±
0
.
1
540
640
640
1241
616
625
C
B
T
A
0
Ø63H7
Ø160h6
Ø12H7
ϕ
视角 A
视角 B
视角 C
1600
1600
1300
1300
R
1037
R
3159
R
697
Ø125
30
˚
8
18
1241
616
625
360
±
0
.
1
220
±
0
.
1
540
220
±
0
.
1
300
±
0.
1320
±
0.
1
360
±
0
.
1
320
±
0.1
540
640
640
C
B
L
L
T点
90
˚
45
˚
2162614
2776
R1124
15
.
5
°
120
°
2624
2363
2529
300
880 1250
2204
820
250
1400
0
31591037
270
S
U
T
A
0
Ø63H7
Ø160h6
P点
JL
05
-
2A24
-
28PC
(带盖)
JL
05
-
6A24
-
28S
JL
05
-
2A24
-
28PC(带盖)
JL
05
-
6A24
-
28S
气体入口
5
×
Rc3/8口 带外壳插头
(
A, B, C, D, E
)
A EDCB
EDCBA
6 7
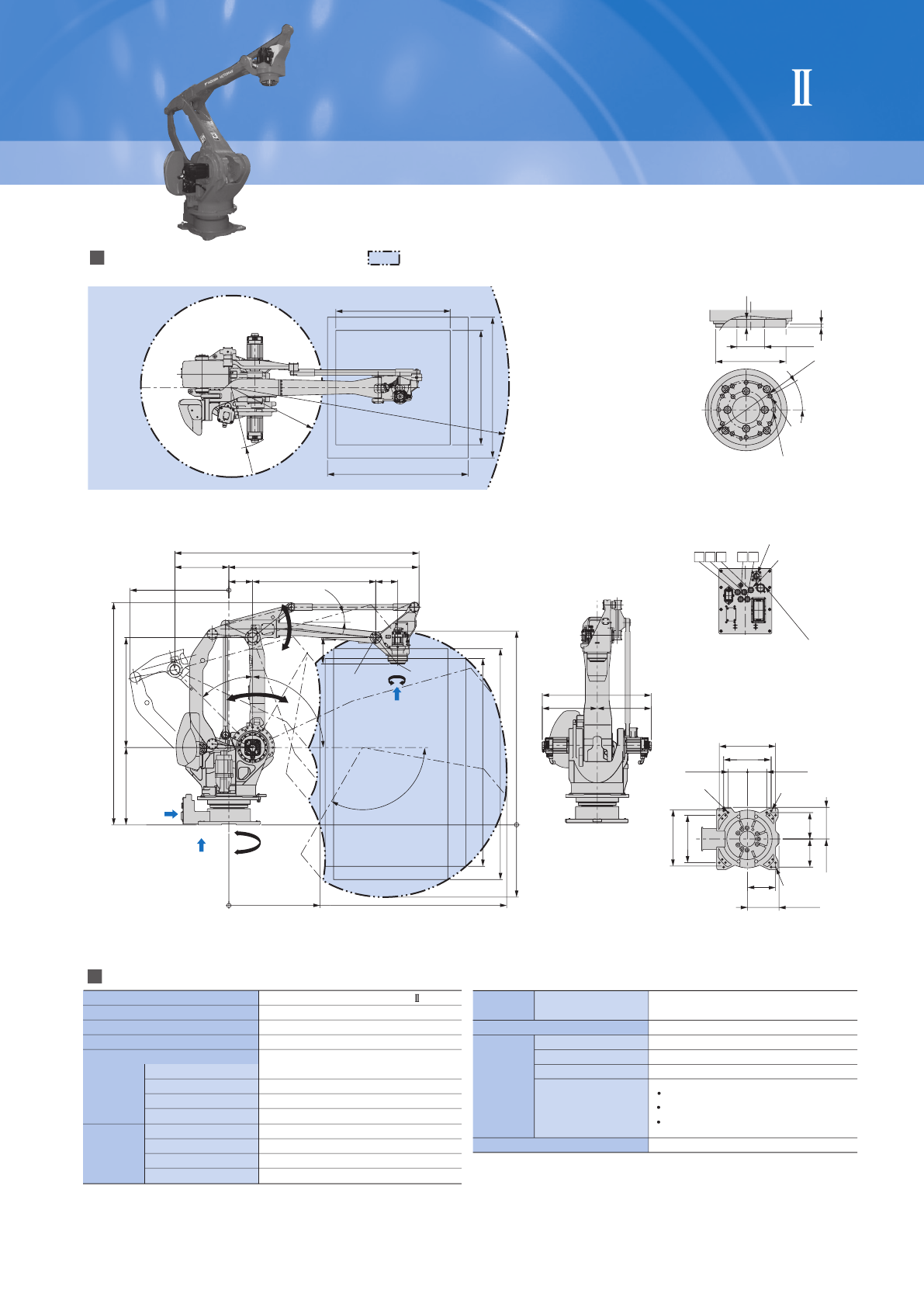
负载160kg,最大臂展R3159mm 负载300kg,最大臂展R3159mm
外形尺寸及动作范围 单位:mm
:
T点动作范围
外形尺寸及动作范围 单位:mm
:
T点动作范围
机器人规格
10×M10
深:16
2×Ø10H7
深:8
无引火性或腐蚀性气体、液体
无水、油、粉尘等
远离电气性噪音源
以下
1
2
:
:
依照 ISO
9283。
因用途、动作而异。
(注)本表记载的是SI单位系。
*
*
1
2
:
:
依照 ISO
9283。
因用途、动作而异。
(注)本表记载的是SI单位系。
*
*
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
动作范围
最大速度
名称
型号
构造
负载
重复定位精度
*
1
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
容许惯性力矩
(GD²/4)
T轴(手腕旋转)
本体质量
设置环境
其他
电源容量
垂直多关节型(4自由度)
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
动作范围
最大速度
名称
型号
构造
负载
重复定位精度
*
1
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
垂直多关节型(4自由度)
电源容量
设置环境
本体质量
容许惯性力矩
(GD²/4)
T轴(手腕旋转)
请准备配套侧接头
装备电缆接头(基座侧)
2×Ø20H7
8×Ø22
总线电缆用管
(内径Ø12)(基座内)
无引火性或腐蚀性气体、液体
无水、油、粉尘等
远离电气性噪音源
请准备配套侧接头
装备电缆接头(基座侧)
10×M10
深:16
2×Ø10H7
深:8
总线电缆用管
(内径Ø12)(基座内)
Ø12H7
2×Ø20H7
8×Ø22
气体入口
5
×
Rc3/8口 带管塞
(
A, B, C, D, E
)
MOTOMAN-MPL500 MOTOMAN-MPL800
MOTOMAN
-
MPL800
YR
-
MPL0800
-
J00
800
kg
0.5 mm
−
180˚
~
+
180˚
−
45˚
~
+
90˚
−
120˚
~
+
15.5˚
−
360˚
~
+
360˚
1.13 rad/s, 65˚/s
1.13 rad/s, 65˚/s
1.13 rad/s, 65˚/s
2.18 rad/s, 125˚/s
550 kg
m
2
2550 kg
0˚C ~
+
45˚C
20% ~ 80%RH(无结露)
4.9 m/s
2
以下
8.0 kVA
视角 A
视角 B
视角 C
MOTOMAN
-
MPL500
YR
-
MPL0500
-
J00
500
kg
0.5 mm
−
180˚
~
+
180˚
−
45˚
~
+
90˚
−
120˚
~
+
15.5˚
−
360˚
~
+
360˚
1.48 rad/s, 85˚/s
1.48 rad/s, 85˚/s
1.48 rad/s, 85˚/s
3.40 rad/s, 195˚/s
200 kg
m
2
2300 kg
0˚C ~
+
45˚C
20% ~ 80%RH(无结露)
4.9 m/s
2
以下
8.0 kVA
视角 A
视角 B
视角 C
R
1037
R
773
1600
1300
1600
1300
R
3159
120
˚
L
S
C
B
U
0
15
.
5
˚
15
.
5
˚
45
˚
90
˚
820
2204
2624
2363
3159
1037
R1124
2167614
2501400270
2529
1250880
2781
300
1391
710681
80
±
0
.
05
30
˚
Ø200
8
10
640
540
360
±
0
.
1
320
±
0
.
1
220
±
0.1
220
±
0.1
360
±
0
.
1
300
±
0.
1
320
±
0
.
1
640
540
1300
1300
1600
1600
R
3159
R
1037
R
868
270
1250
880
1037 3159
820
0
1400
250
300
2204
15
.
5
˚
2529
R1124
2781
614 2167
2363
2624
45
˚
90
˚
120
˚
40
B
S
C
L
U
T点
779
8
10
80
±
0
.
05
30
˚
640
640
540
540
290
±
0
.
1
290
±
0
.
1
290
±
0
.
1290
±
0
.
1
290
±
0.1 290
±
0.1
365
±
0
.
1
384
±
0.1
1593
814
T
A
T点
T
A
0
0
Ø100H
7
Ø250h6
Ø200
JL
05
-
2A24
-
28PC(带帽)
JL
05
-
6A24
-
28S
JL
05
-
2A24
-
28PC(带帽)
JL
05
-
6A24
-
28S
P点
P点
EDCBA
EDCBA
8 9
机器人规格
机器人规格
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
动作范围
最大速度
名称
型号
构造
负载
重复定位精度
*
1
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
*
2
温度
湿度
振动
容许惯性力矩
(GD²/4)
T轴(手腕旋转)
本体质量
设置环境
其他
电源容量
无引火性或腐蚀性气体、液体
无水、油、粉尘等
远离电气性噪音源
垂直多关节型(4自由度)
1
2
:
:
依照 ISO
9283。
因用途、动作而异。
(注)本表记载的是SI单位系。
*
*
请准备配套侧接头
总线电缆用管
(内径Ø12)(基座内)
请准备配套侧接头
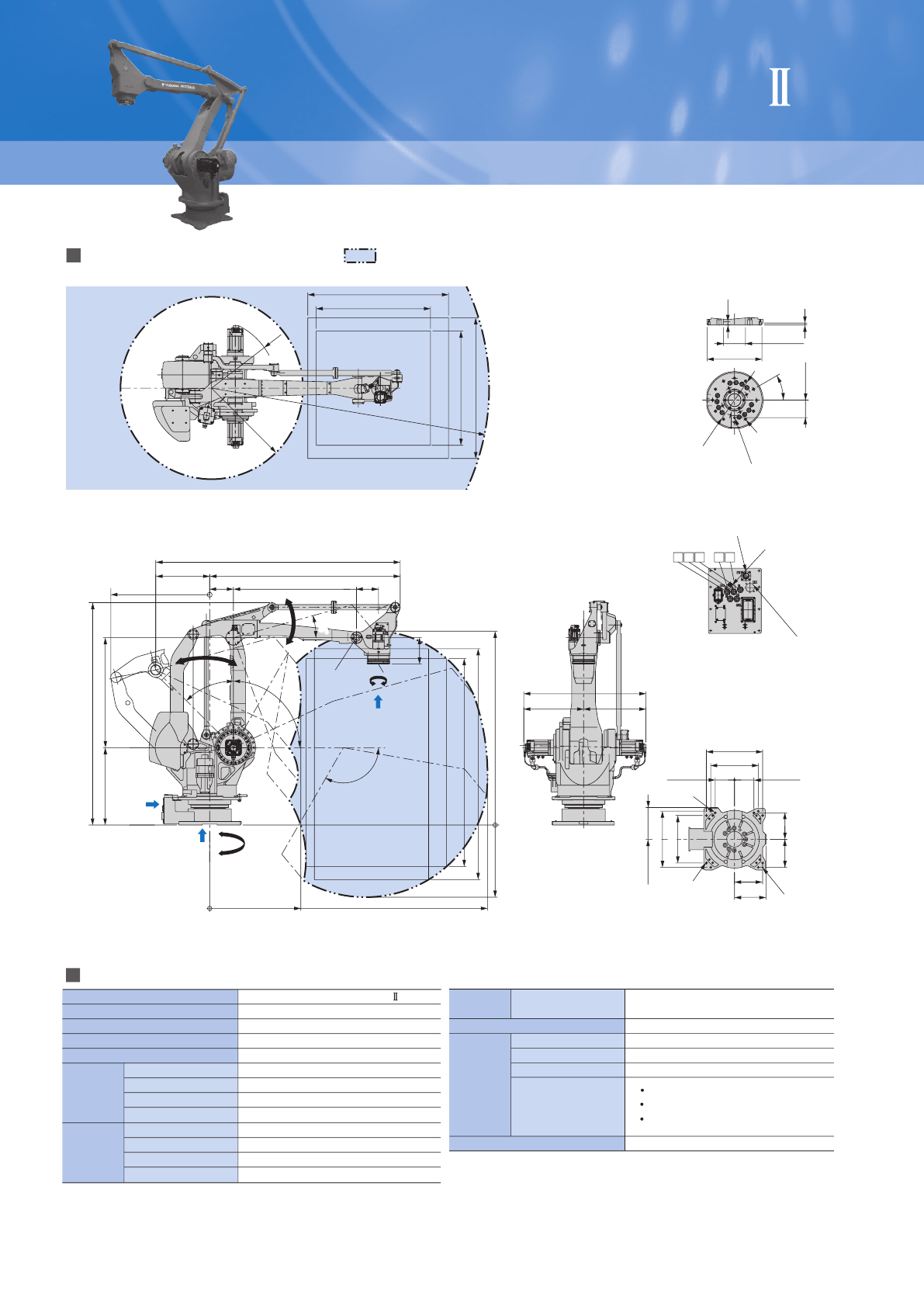
负载500kg,最大臂展R3159mm 负载800kg,最大臂展R3159mm
外形尺寸及动作范围 单位:mm
:
T点动作范围
外形尺寸及动作范围 单位:mm
:
T点动作范围
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
动作范围
最大速度
名称
型号
构造
负载
重复定位精度
*
1
S轴(旋转)
L轴(下臂)
U轴(上臂)
T轴(手腕旋转)
*
2
温度
湿度
振动
容许惯性力矩
(GD²/4)
T轴(手腕旋转)
本体质量
设置环境
其他
电源容量
1
2
:
:
依照 ISO
9283。
因用途、动作而异。
(注)本表记载的是SI单位系。
*
*
无引火性或腐蚀性气体、液体
无水、油、粉尘等
远离电气性噪音源
垂直多关节型(4自由度)
装备电缆接头(基座侧)
Ø12H7
12×M12
深:18
Ø10H7
深:10
总线电缆用管
(内径Ø12)(基座内)
气体入口
5
×
Rc3/8口 带管塞
(
A, B, C, D, E
)
8×Ø22
2×Ø20H7
2×Ø16H7
8×Ø22
气体入口
5
×
Rc3/8口 带管塞
(
A, B, C, D, E
)
装备电缆接头(基座侧)
Ø100H7
Ø250h6
Ø10H7
深:10
12×M12
深:18
2×Ø20H7