00193937-02.pdf - 第109页
사용자 매뉴얼 SIPLACE HF 시리즈 3 기술 자료 소프트웨어 버전 SR.505.xx 2004 년 7 월 미국판 3.7 실장 헤드 109 3.7.3.3 기술 자료 3 기 본 컴포넌트 카메라가 있는 6 세그먼트 Collect&Place 헤 드 DCA 카메라가 있는 6 세그먼트 Collect&Place 헤드 컴포넌트 범위 0603 ~ 32 x 32 mm 2 · 0201 ~ 플 …
3 기술 자료 사용자 매뉴얼 SIPLACE HF 시리즈
3.7 실장 헤드 소프트웨어 버전 SR.505.xx 2004 년 7 월 미국판
108
스타는 세그먼트 6 개가 있는 스타 축을 따라 회전합니다 . 세그먼트에는 슬리브가 있습니다.
모든 슬리브에는 노즐이 하나씩 장착되어 있는데 , 이 노즐이 컴포넌트를 흡입하여 픽업 /실
장 위치 (1) 에서 리젝트 위치 (2) 이나 광학적 센터링 위치 (4) 나 회전 위치 (5) 로 전달합니다
.
Z 축은 수직 운동을 합니다. 아래쪽 스타 위치 (1) 에 있는 슬리브는 모두 이 축에 의해 상하 운
동을 하면서 컨베이어에서 컴포넌트를 픽업하여 PCB 에 장착합니다 . Z 축은 " 지능형 축 " 입
니다. 이 축은 각 컨베이어 트랙의 픽업 높이와 각 컴포넌트의 실장 높이를 " 기억 " 합니다.
따라서 실장 프로세스 속도가 빨라질 수 있습니다. 정해진 실장력은 항상 같은 상태를 유지합
니다.
DP 축은 광학적으로 센터링된 컴포넌트를 올바른 실장 각도로 회전시킵니다 . 회전 및 이동 축
의 운동 순서는 제어 회로가 제어합니다 . 위치 및 속도 센서는 축 운동의 실제 값을 축 제어
장치로 전달합니다. 셋포인트와 실제 값을 비교하여 서보 앰프의 힘 및 속도 파라미터와 수행
될 축 운동을 결정합니다 . 노즐의 진공 값은 픽업 및 실장 프로세스 전체에 걸쳐 계속적으로
확인되어 실장 오류율이 최대한 낮도록 합니다.
사용자 매뉴얼 SIPLACE HF 시리즈 3 기술 자료
소프트웨어 버전 SR.505.xx 2004 년 7 월 미국판 3.7 실장 헤드
109
3.7.3.3 기술 자료
3
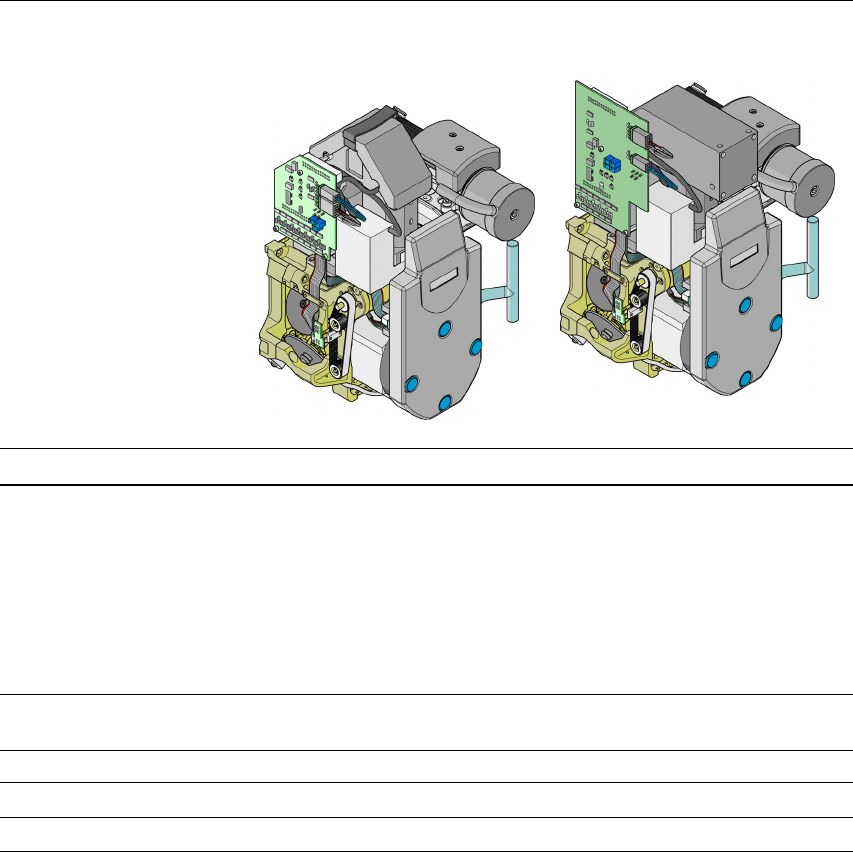
기본 컴포넌트 카메라가 있는
6 세그먼트 Collect&Place 헤
드
DCA 카메라가 있는 6 세그먼트
Collect&Place 헤드
컴포넌트 범위
0603 ~ 32 x 32mm
2
·
0201 ~ 플립 칩 , 베어 다이
컴포넌트 사양
최고 높이
최소 리드 피치
최소 범프 피치
최소 볼 범프 ∅
최소 치수
최대 치수
최대 무게
8.5mm
0.5mm
0.56mm
0.32mm
1.6 x 0.8mm
2
32 x 32mm
2
5g
8.5mm
0.4mm
0.2mm
0.11mm
0.6 x 0.3mm
2
13 x 13mm
2
5g
프로그램이 가능한 장착
력
2.4N - 5.0N 2.4N - 5.0N
노즐 종류 8 xx, 9 xx 8 xx, 9 xx
X/Y 정확도 ± 60 µm/4 σ ± 55 µm/4 σ
각도 정확도 ± 0.3°/4 σ ± 0.3°/4 σ
3 기술 자료 사용자 매뉴얼 SIPLACE HF 시리즈
3.7 실장 헤드 소프트웨어 버전 SR.505.xx 2004 년 7 월 미국판
110
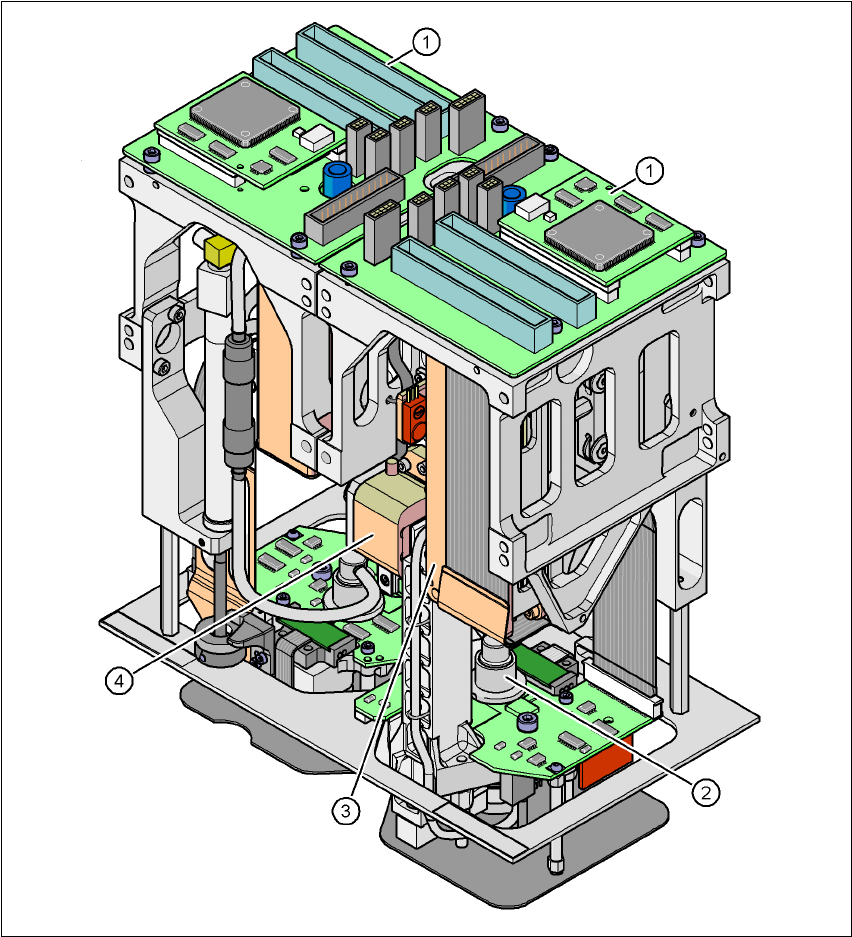
3.7.4 고정밀도 IC 실장용 SIPLACE TWIN 헤드
3
그림 3.7 - 9 고정밀도 IC 실장용 TWIN 헤드
3
(1)Pick&Place 모듈 - TWIN 헤드는 Pick&Place 모듈 2 개로 구성되어 있습니다.
(2)DP 축
(3)Z 축 드라이브
(4)Z 축의 증분 거리 측정 시스템