HW-T4-44_50F_PCBU.pdf - 第10页
Path Opt imiz ation Syn ch ron ous Pic k i-n g Shor test Pat h Majo rity Prio rity Auto mat ic Dis tri -B u t i o n o f N o z z l e S eque nce G l o b al O p t i m i z a t i - o n of PCB Pat h Fr i en d ly Co m p a t- i …
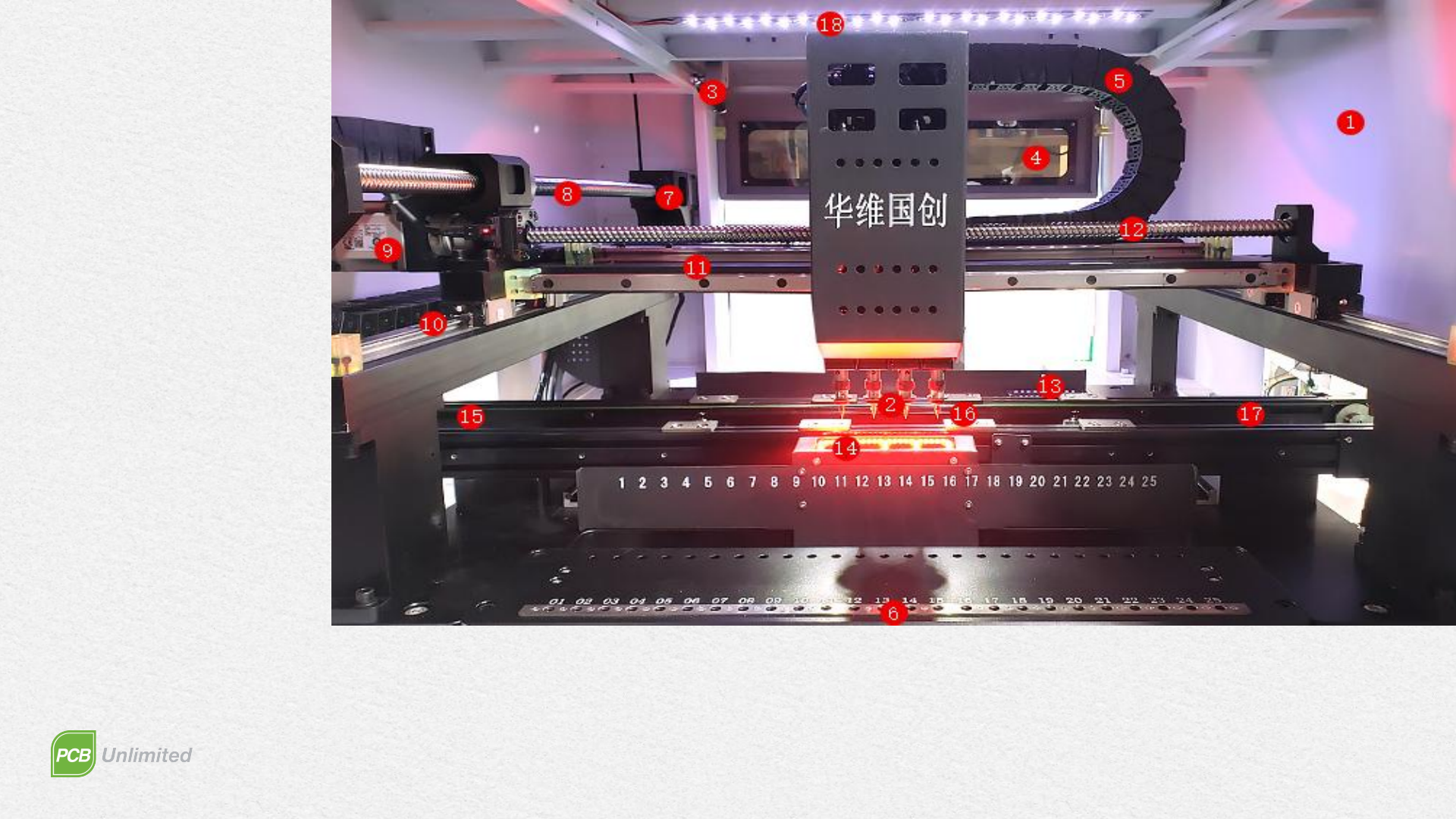
1.Housing 2.Placement Heads 3.Pneumatic Support Bar 4.Safety shield 5.Flexible Silent Cable Carrier
6.Feeder Slots 7.Servo Motor of Y Axis 8.Ground Ball Screw of Y Axis 9.Servo Motor of X Axis 10.Linear
Motion Guide of Y Axis 11.Linear Motion Guide of X Axis 12.Ground ball screw of X axis 13. 5MP HD Camera
14.1MP Fast HD Camera 15.Waiting Area 16. Mounting Area 17. Exiting Area
13
20
1
19
4
16
17 18
2
6
7
11
10
9
8
14
3
12
15
Structure
of the Machine
Internal
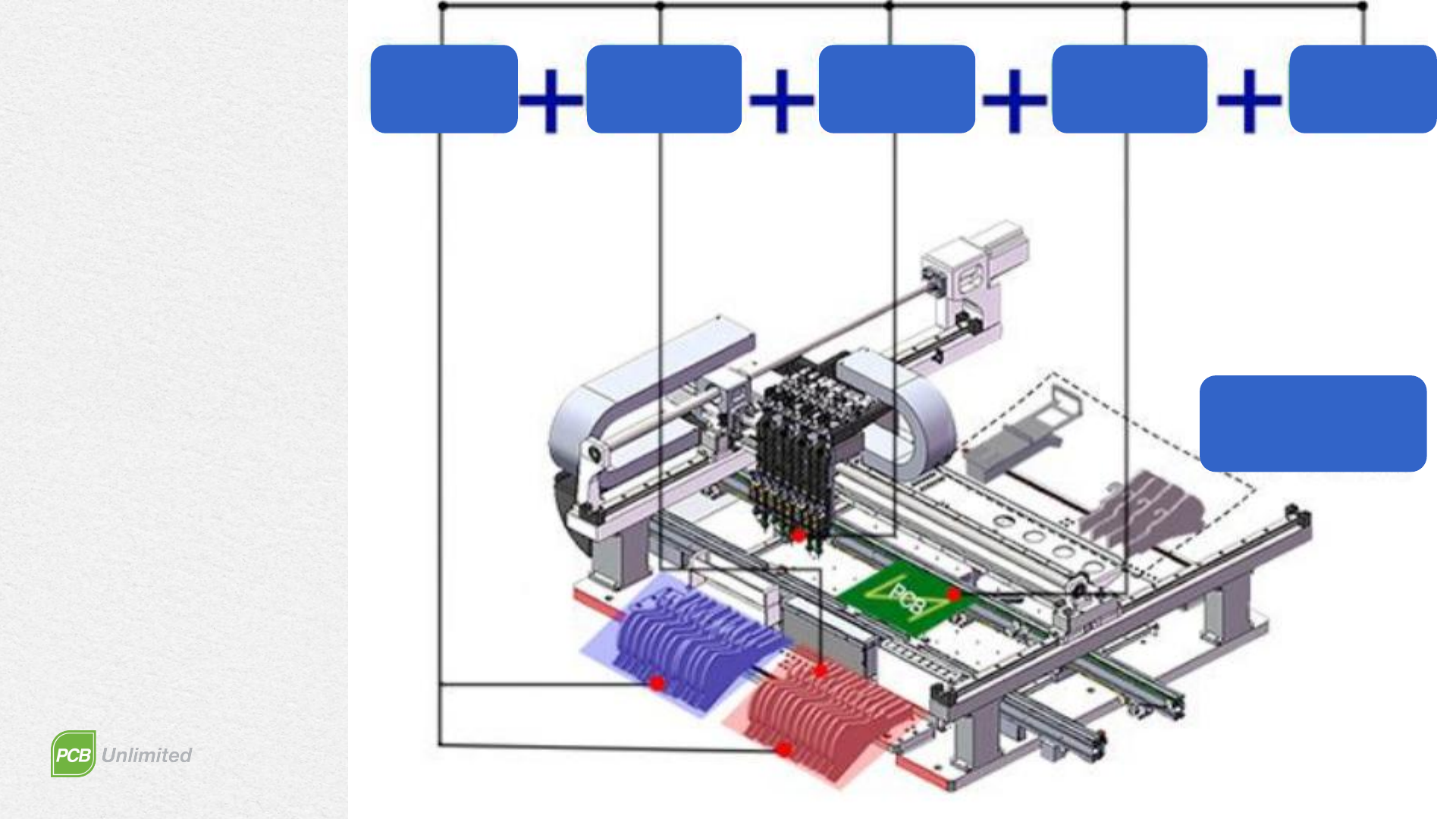
Path Optimization
Synchronous Picki-n
g
Shortest Path
Majority Priority
Automatic Distri-B
ution of Nozzle S
equence
Global Optimizati-o
n of PCB Path
Friendly Compat-i
bility of Core Al-g
orithms
Slow Down to Large Compo-n
ents
Lower Priority to Componen-ts
Less Used
Mounting Project
Optimization
System
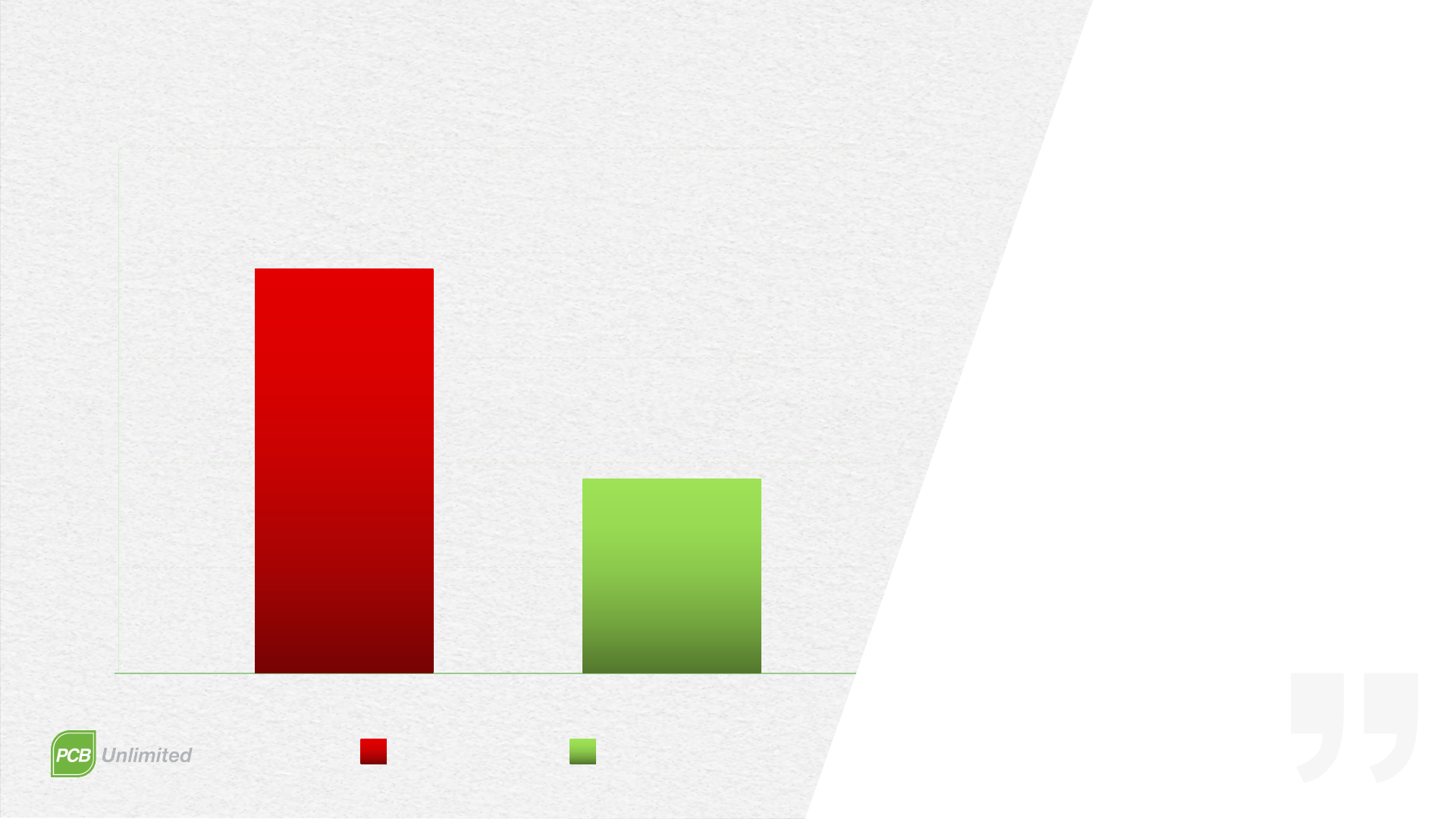
Competitive
Comparison
of Mounting Efficiency
*The speed is the actual mount-
ing speed calculated by manual
hand-held stopwatch within one
hour, so as to eliminate the pos-
sibility of exaggerating the data
with false mark in the software.
6000
9000
12000
15000
18000
3000
Comparison of Actual Mounting Speed Within One Hour
HuaweiGuochuang
Others