AIMZ03S-规格书.pdf.pdf - 第6页
3. 3. 3. 3.结 结 结 结 构 构 构 构 - 4 - AIM AIM AIM AIM - - - -0 0 0 0 30411 30411 30411 30411 Z Z Z ZS S S S 3.1 3.1 3.1 3.1 机器结构 机器结构 机器结构 机器结构 配备有 2 个模组 4 个供 料平台,以及 2 组 XY 机械手。 B1 B2 A1 A2 4 个供料平台 料站部 NG 元件箱 共 4 套 共 4 套 吸嘴更换…
2.
2.2.
2.规
规规
规
格
格格
格
- 3 -
AIM
AIMAIM
AIM-
--
-0
00
030411
3041130411
30411Z
ZZ
ZS
SS
S
2.2
2.22.2
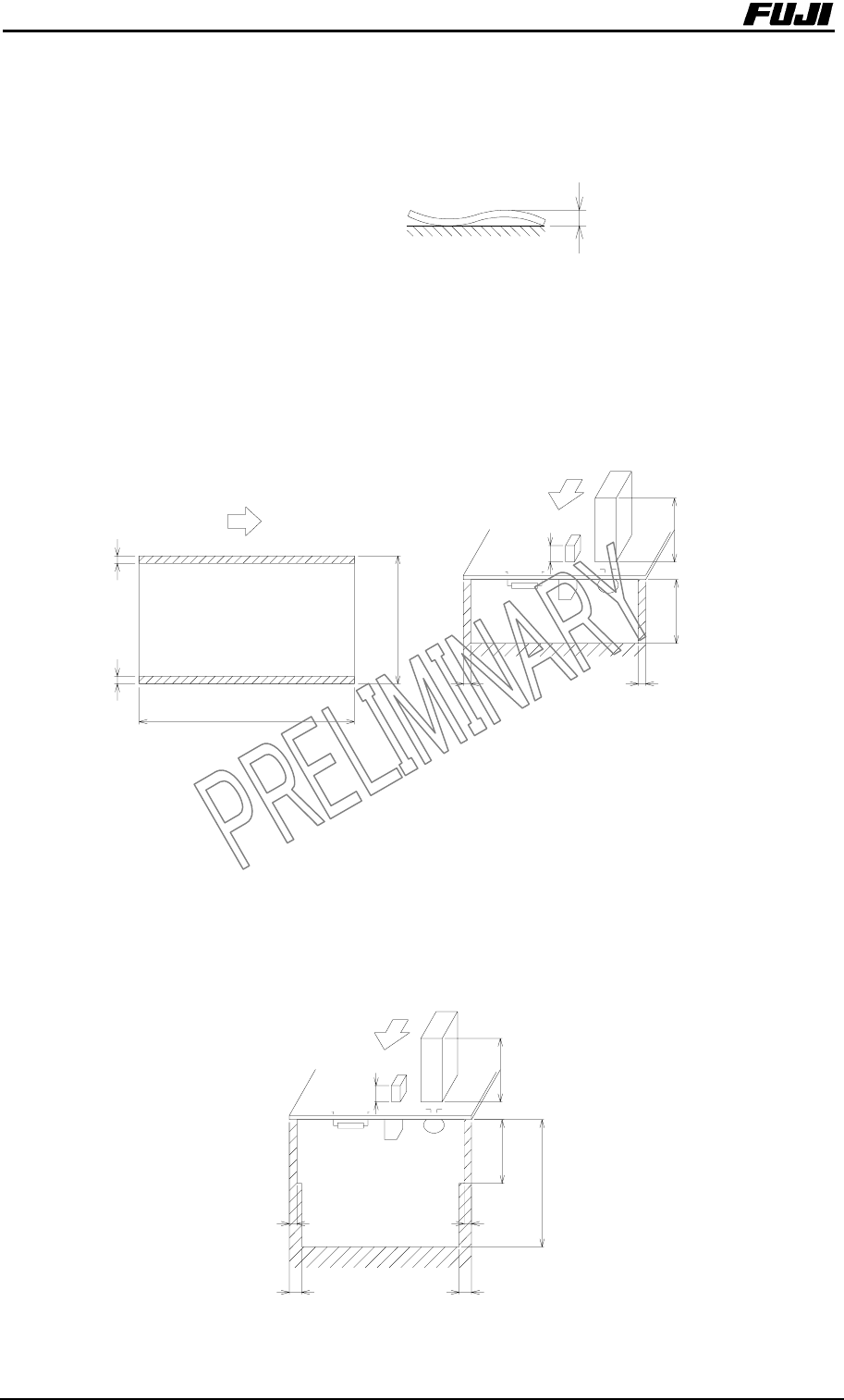
2.2 对象电路板的限制
对象电路板的限制对象电路板的限制
对象电路板的限制
1) 翘曲
MAX 2.0mm以内
2
2) 先贴装元件
<使用支撑销时>
先贴装元件的高度 MAX 6.5mm (H08工作头时)
MAX 25.4mm(H01工作头时)
反面先贴装元件的高度 MAX 25.4mm
MAX 6 .5
3
3
25 .4
MAX 25 .4
L
W
3 3
电路板端面 电路板下
※夹紧侧的无效区域需要从电路板的端面开始3mm的平面。
<未使用支撑销时>
先贴装元件的高度 MAX 6.5mm (H08工作头时)
MAX 25.4mm(H01工作头时)
反面先贴装元件的高度 MAX 50.8mm
MAX 6 .5
5
5
50 .8
33
25 .4
MAX 25 .4
电路板下
3.
3.3.
3.结
结结
结
构
构构
构
- 4 -
AIM
AIMAIM
AIM-
--
-0
00
030411
3041130411
30411Z
ZZ
ZS
SS
S
3.1
3.13.1
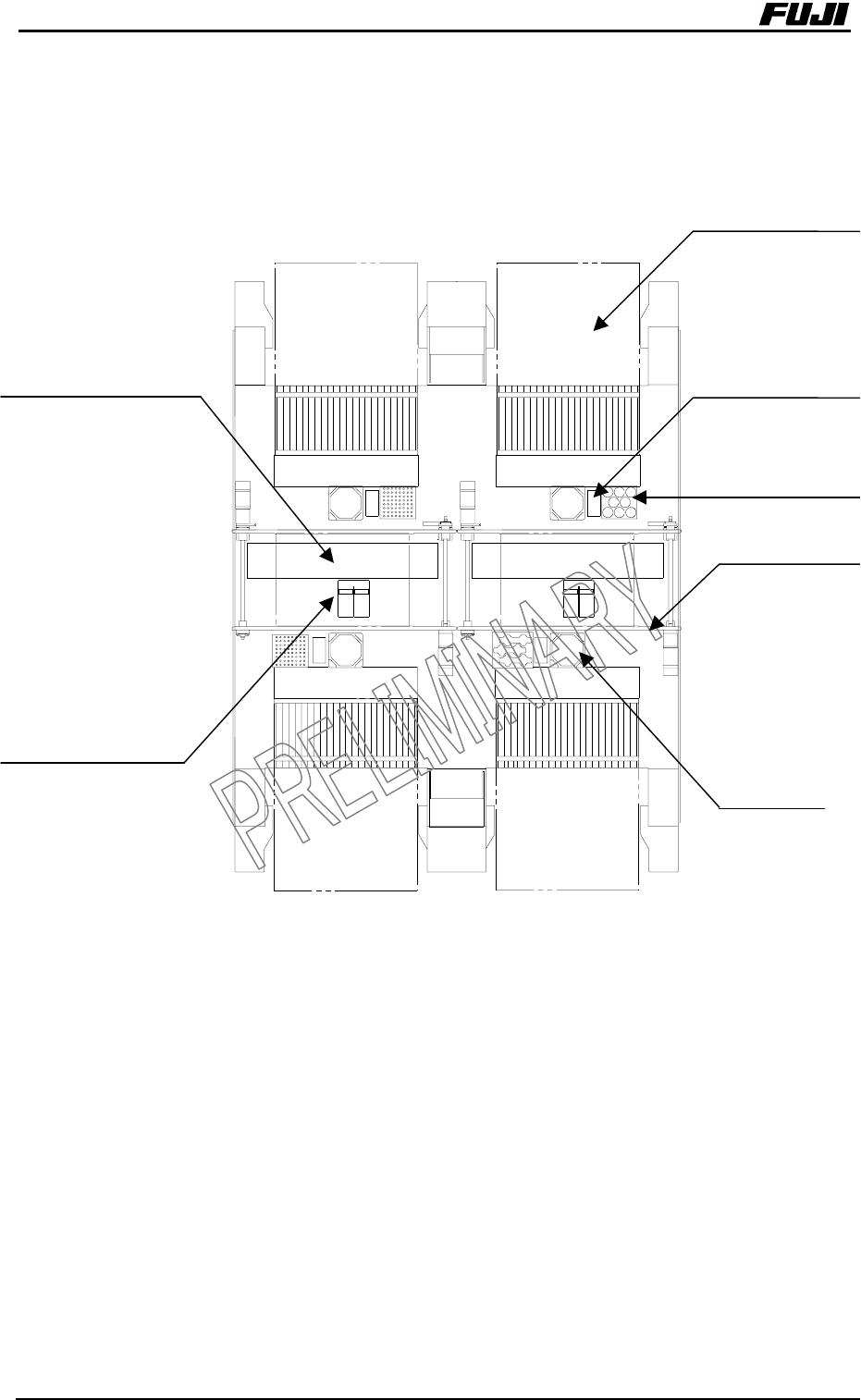
3.1 机器结构
机器结构机器结构
机器结构
配备有2个模组4个供料平台,以及2组XY机械手。
B1
B2
A1
A2
4个供料平台
料站部
NG元件箱
共4套
共4套
吸嘴更换器
主搬运轨道
2模组独立驱动
贴装工作头
X
Y
机械手
2模组独立驱动
1个机械手2个工作头
元件相机
共4套
4.
4.4.
4.单
单单
单
元
元元
元
- 5 -
AIM
AIMAIM
AIM-
--
-0
00
030411
3041130411
30411Z
ZZ
ZS
SS
S
4.1
4.14.1
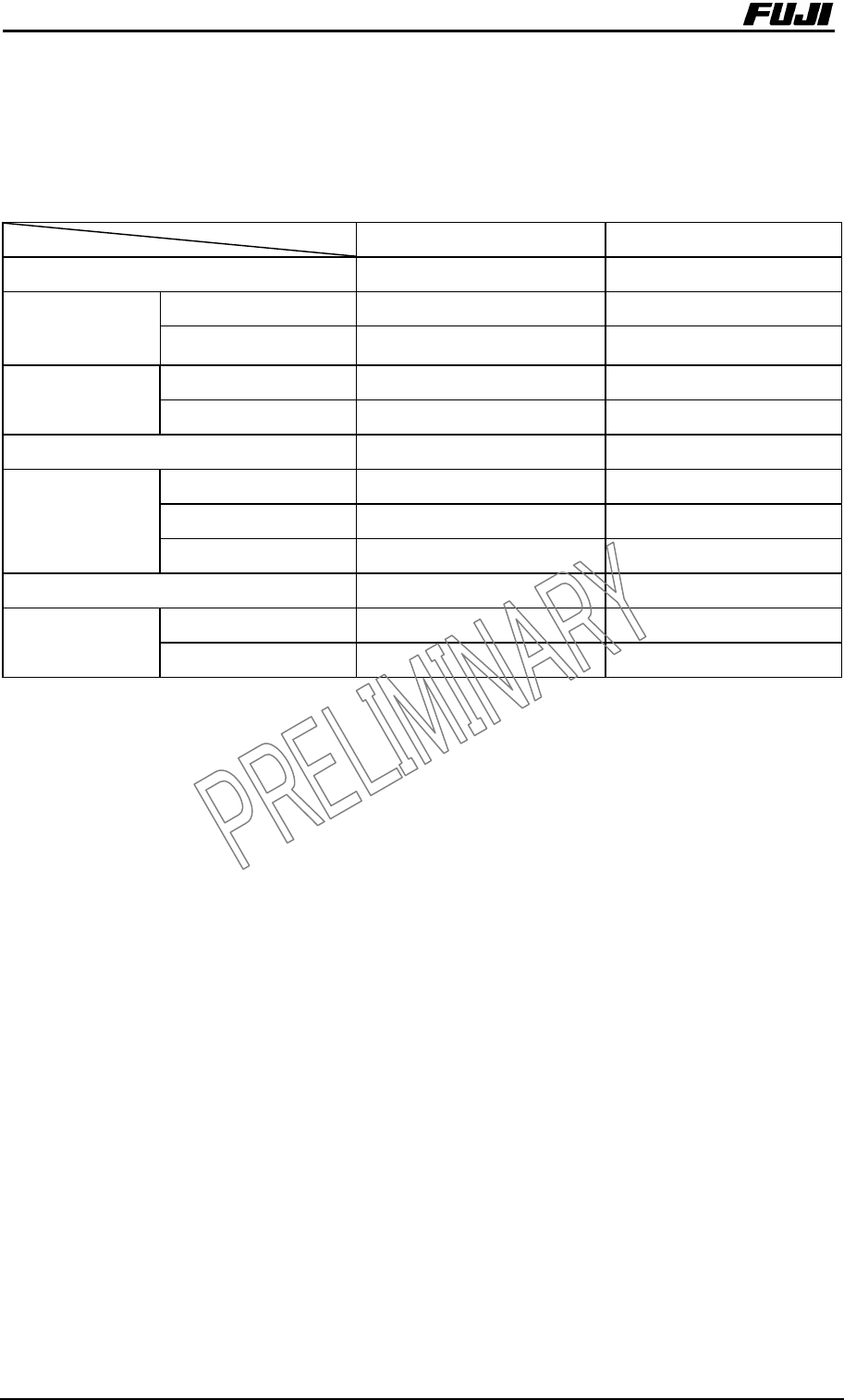
4.1 贴装工作头
贴装工作头贴装工作头
贴装工作头
根据对象元件不同,可以从2种贴装工作头中进行选择。
在一个机械手上可以搭载2个贴装工作头,能够简单地进行交换。
规格 工作头类型
H08 H01
吸嘴数(个)
81
Cpk≧1.00 ±0.050 ±0.030
贴装精度(3
σ)
(mm)
Cpk≧1.33 ±0.066 ±0.040
大小(mm) 0603~□7.5 3216~□74
对象元件
高度(mm)
6.5 25.4
贴装面先贴装元件高度(mm)
6.5 25.4
料带(mm) 8~12(16) 8~88
料管 × ○元件供给形态
料盘 × ○
吸嘴更换 ○ ○
机械夹头 × ○
选项
加压力贴装 × ○