AIMZ03S-规格书.pdf.pdf - 第7页
4. 4. 4. 4.单 单 单 单 元 元 元 元 - 5 - AIM AIM AIM AIM - - - -0 0 0 0 30411 30411 30411 30411 Z Z Z ZS S S S 4.1 4.1 4.1 4.1 贴装工作头 贴装工作头 贴装工作头 贴装工作头 根据对象元件不同,可 以从 2 种贴装工作头 中进行选择。 在一个机械手上可以搭 载 2 个贴装工作头, 能够简单地进行交 换。 规格 工作头类型 H08…
3.
3.3.
3.结
结结
结
构
构构
构
- 4 -
AIM
AIMAIM
AIM-
--
-0
00
030411
3041130411
30411Z
ZZ
ZS
SS
S
3.1
3.13.1
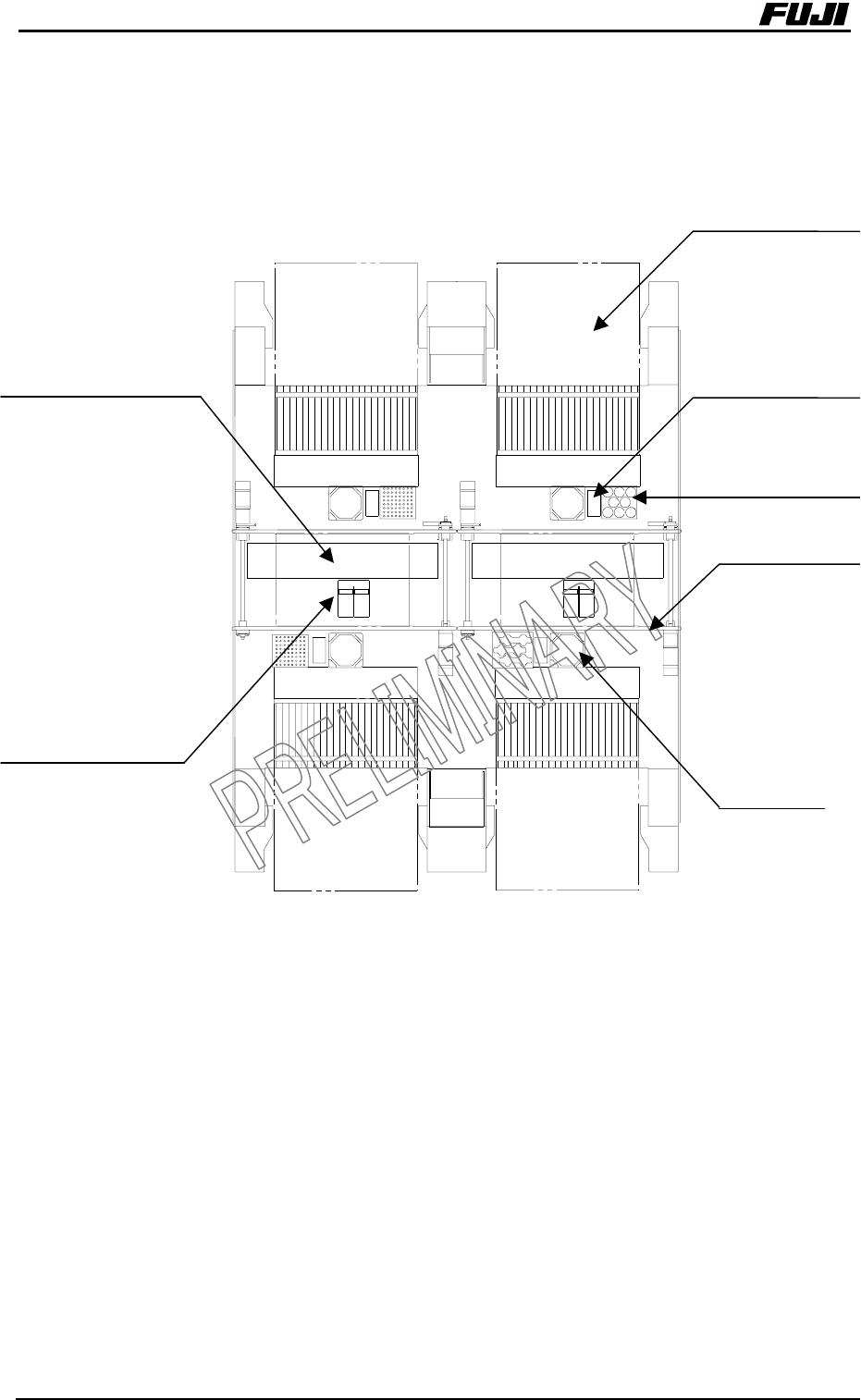
3.1 机器结构
机器结构机器结构
机器结构
配备有2个模组4个供料平台,以及2组XY机械手。
B1
B2
A1
A2
4个供料平台
料站部
NG元件箱
共4套
共4套
吸嘴更换器
主搬运轨道
2模组独立驱动
贴装工作头
X
Y
机械手
2模组独立驱动
1个机械手2个工作头
元件相机
共4套
4.
4.4.
4.单
单单
单
元
元元
元
- 5 -
AIM
AIMAIM
AIM-
--
-0
00
030411
3041130411
30411Z
ZZ
ZS
SS
S
4.1
4.14.1
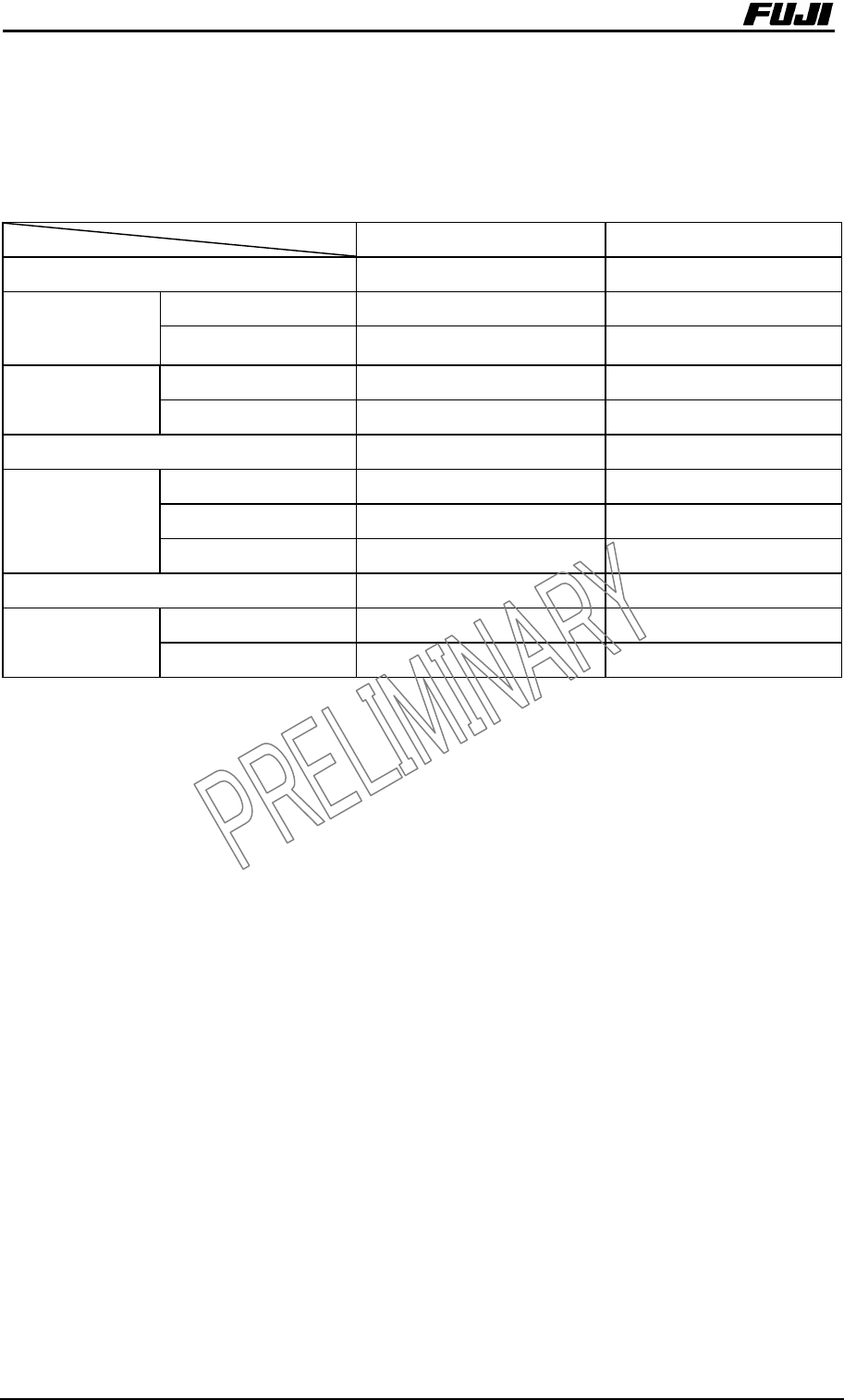
4.1 贴装工作头
贴装工作头贴装工作头
贴装工作头
根据对象元件不同,可以从2种贴装工作头中进行选择。
在一个机械手上可以搭载2个贴装工作头,能够简单地进行交换。
规格 工作头类型
H08 H01
吸嘴数(个)
81
Cpk≧1.00 ±0.050 ±0.030
贴装精度(3
σ)
(mm)
Cpk≧1.33 ±0.066 ±0.040
大小(mm) 0603~□7.5 3216~□74
对象元件
高度(mm)
6.5 25.4
贴装面先贴装元件高度(mm)
6.5 25.4
料带(mm) 8~12(16) 8~88
料管 × ○元件供给形态
料盘 × ○
吸嘴更换 ○ ○
机械夹头 × ○
选项
加压力贴装 × ○
4.
4.4.
4.单
单单
单
元
元元
元
- 6 -
AIM
AIMAIM
AIM-
--
-0
00
030411
3041130411
30411Z
ZZ
ZS
SS
S
4.2
4.24.2
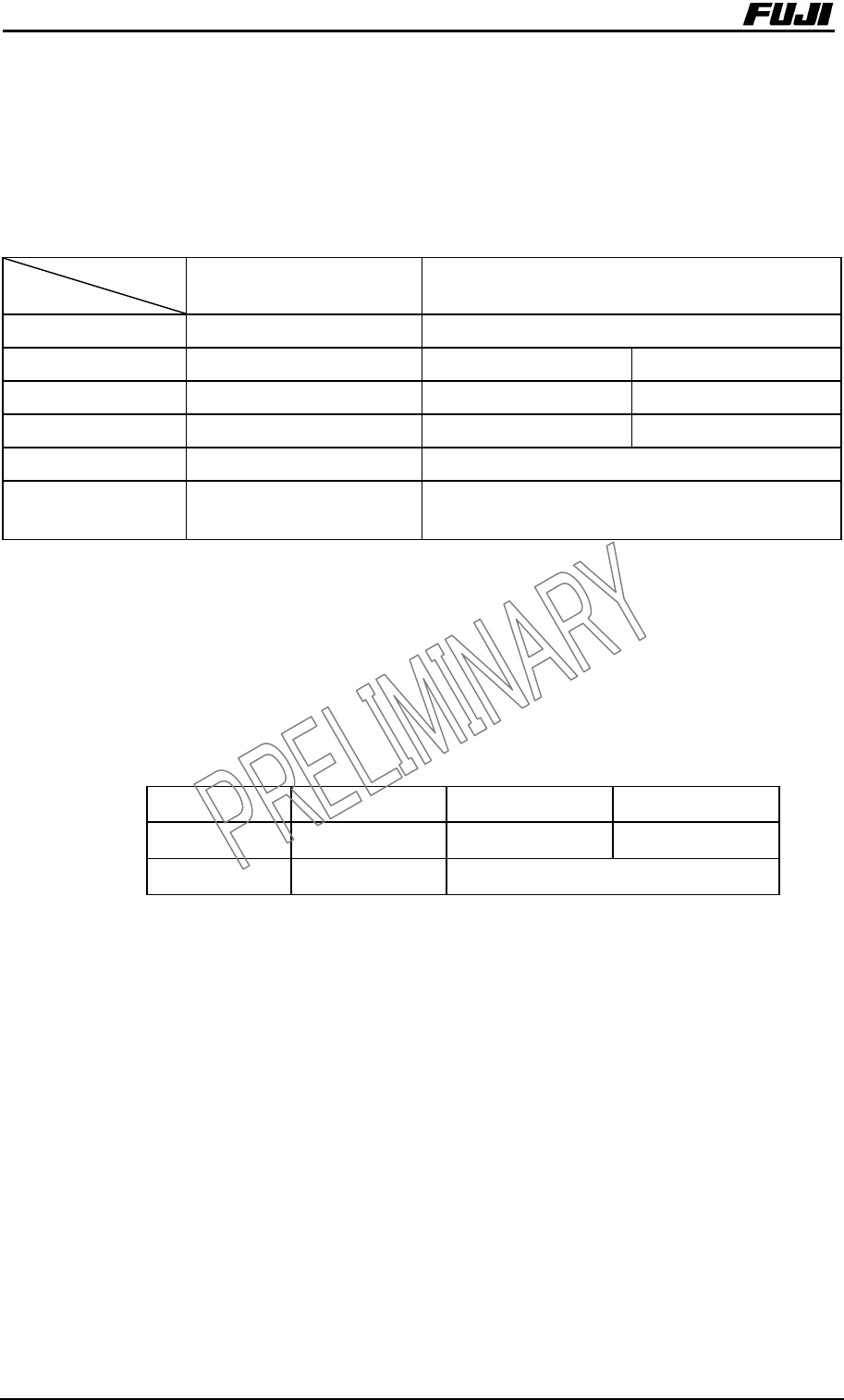
4.2 相机
相机相机
相机
定位相机被用来识别电路板上的基准定位点并加以补正。此外,也能读取贴在电路
板上的2维代码,判断电路板的类别。
元件相机被用来识别元件的形状和进行吸取姿势的影像处理并加以补正。
相机类型
规 格
定位相机 元件相机
对象大小(mm) φ0.5~□3.5 0603~□45(□45以上分割读取)
最小间距(mm) - 引脚:0.24 锡球:0.40
最小宽度/直径(mm) - 引脚:0.12 锡球:0.25
最小间隔(mm) - 引脚:0.12 锡球:0.15
光 源- LED 光源
电路板2维代码对应
MAX □5mm
(QR Code, Data Matrix)
-
4.3
4.34.3
4.3 吸嘴置放台
吸嘴置放台吸嘴置放台
吸嘴置放台
自动更换搭载在贴装工作头上的吸嘴。
根据贴装工作头的种类不同,所搭载的类型也不同。各类型可以一次性简单更换,
更换后机器会自动识别类型。
类型
ND32C NC08B
NC8LB
※
保存数量
32 8 8
对象吸嘴 H08工作头用 H01工作头用
※NC8LB在使用料盘单元-L时使用。