00194569-02.pdf - 第90页
3 Tehnilised andmed Kasutusjuhend SIPLACE HS-60 3.8 Ülevaade moodulitest - ladumispead Tarkvara versioon SR.503.xx 07/2003 EE väljaanne 90 3.8 Ülevaade moodulitest - ladumispead 3.8.1 12-segmendiline Co ll ect&Place …
Kasutusjuhend SIPLACE HS-60 3 Tehnilised andmed
Tarkvara versioon SR.503.xx 07/2003 EE väljaanne 3.7 Ülevaade moodulitest - portaalid
89
Y-telg koosneb järgmistest põhiosadest:
– Y-telje lineaarajam koos püsimagnetiga (1) ja adapterplaadiga (2);
– Y-telje juhikusüsteem;
– Y-telje mõõtesüsteem.
Y-telge käitatakse lineaarmootori abil. Lineaarajami sekundaarosa koosneb püsimagnetitest ning
see on monteeritud masina raami külge. Primaarosa on kinnitatud poltidega portaali külge
(adapterplaadile). Portaalide kokkupõrget välditakse kokkupõrget vältiva vooluringi abil.
3.7.5 Y-telje tehnilised andmed
Ajam Otsene, lineaarmootor
Maksimaalne kiirus 2,5 m/s
Portaalide liikumisulatused arvutatuna masina keskpunktist Portaal 1 - 688,5 mm
Portaal 2 - 768,5 mm
Portaal 3 - 688,5 mm
Portaal 4 - 768,5 mm
Nihete mõõtesüsteem Metalljoonlaud
Skaala ulatus 1530 mm
Lahutus 1 µm
3 Tehnilised andmed Kasutusjuhend SIPLACE HS-60
3.8 Ülevaade moodulitest - ladumispead Tarkvara versioon SR.503.xx 07/2003 EE väljaanne
90
3.8 Ülevaade moodulitest - ladumispead
3.8.1 12-segmendiline Collect&Place tööpea koos standardse komponentide
kaameraga
3.8.1.1 Ehitus
3
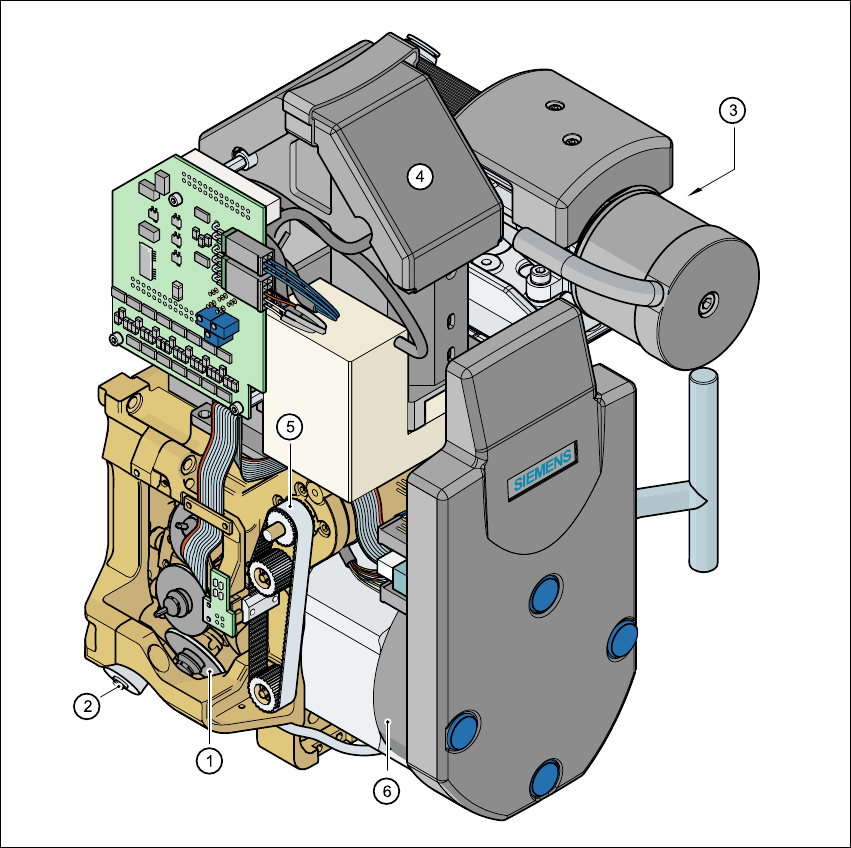
Joon. 3.8 - 1 12-segmendilise Collect&Place tööpea ehitus
(1) 12 pinooliga täht (4) Kopmonentide tuvastusmoodul
(2) "Praak" ventiili reguleerimisajami mootor (5) Z-telje ajam
(3) Pöördmoodul (6) Tähe mootor
Kasutusjuhend SIPLACE HS-60 3 Tehnilised andmed
Tarkvara versioon SR.503.xx 07/2003 EE väljaanne 3.8 Ülevaade moodulitest - ladumispead
91
3.8.2 Kirjeldus
– 12-segmendiline Collect&Place tööpea töötab põhimõttel "haara ja aseta" , st komponendid
haaratakse imiotsaku abil (imiotsakus tekitatakse vaakum) ning asetatakse järgmises tsüklis
suruõhku kasutades ettevaatlikult ja täpselt trükiplaadile. Imiotsaku vaakumit (rõhku)
kontrollitakse nimetatud protsessi käigus mitu korda, et teha kindlaks komponendi korrektne
haaramine ja trükiplaadile asetamine.
– Z-telje adaptiivne seiskamisrežiim kompenseerib trükiplaadi pinna võimalikud ebatasasused
komponentide asetamisel trükiplaadile.
– Komponendi paigaldamine toimub samas tsüklis. Enne komponendi paigaldamist mõõdetakse
seda optoelektroonilise tehisnägemismooduli abil.
– Komponentide tehisnägemismoodul tekitab jooksvalt paigaldatavast komponendist kujutise.
– Määratakse komponendi täpne asukoht.
– Komponendi identifitseerimiseks võrreldakse paigaldatava komponendi korpuse kuju vastava
programmeeritud korpuse kujuga. Komponendid, mida ei õnnestu identifitseerida, lükatakse
seadme poolt tagasi ("praak").
– Pöördmoodul pöörab komponendi nõutavasse paigaldusasendisse.
– Defektsed komponendid lükatakse tagasi ja haaratakse uuesti korrigeerimistsükli käigus.
3.8.3 Tehnilised andmed
3
Komponentide tüübid 0201 kuni PLCC44 k.a BGA, µBGA, pöördkiibid,
TSOP, QFP PLCC, SO kuni SO32, DRAM
Komponentide tehnilised andmed
Max. kõrgus
Väljaviikude min. samm
Väljaviikkontaktide min. samm
Väljaviikkontakti min. läbimõõt
Min. mõõdud
Max. mõõdud
Max. kaal
6 mm
0,5 mm
0,35 mm
0,2 mm
0,6 mm x 0,3 mm
18,7 mm x 18,7 mm
2 g
Programmeritav paigaldusjõud 2,4 kuni 5,0 N
Imiotsakute tüübid 9 xx
Max. ladumiskiirus 15 000 komp./h
Nurktäpsus ± 0,7° / 4 sigma
Tehisnägemismooduli ladumistäpsus ± 80 µm / 4 sigma