00194569-02.pdf - 第94页
3 Tehnilised andmed Kasutusjuhend SIPLACE HS-60 3.9 Ülevaade moodulitest - tehisnägemismoodulid T a rkvara versioon SR.503.xx 07/2003 EE väljaanne 94 3.9.2 T rükiplaatide tehisnägem ismoodul (standardne kaamera) 3.9.2.1 …
Kasutusjuhend SIPLACE HS-60 3 Tehnilised andmed
Tarkvara versioon SR.503.xx 07/2003 EE väljaanne 3.9 Ülevaade moodulitest - tehisnägemismoodulid
93
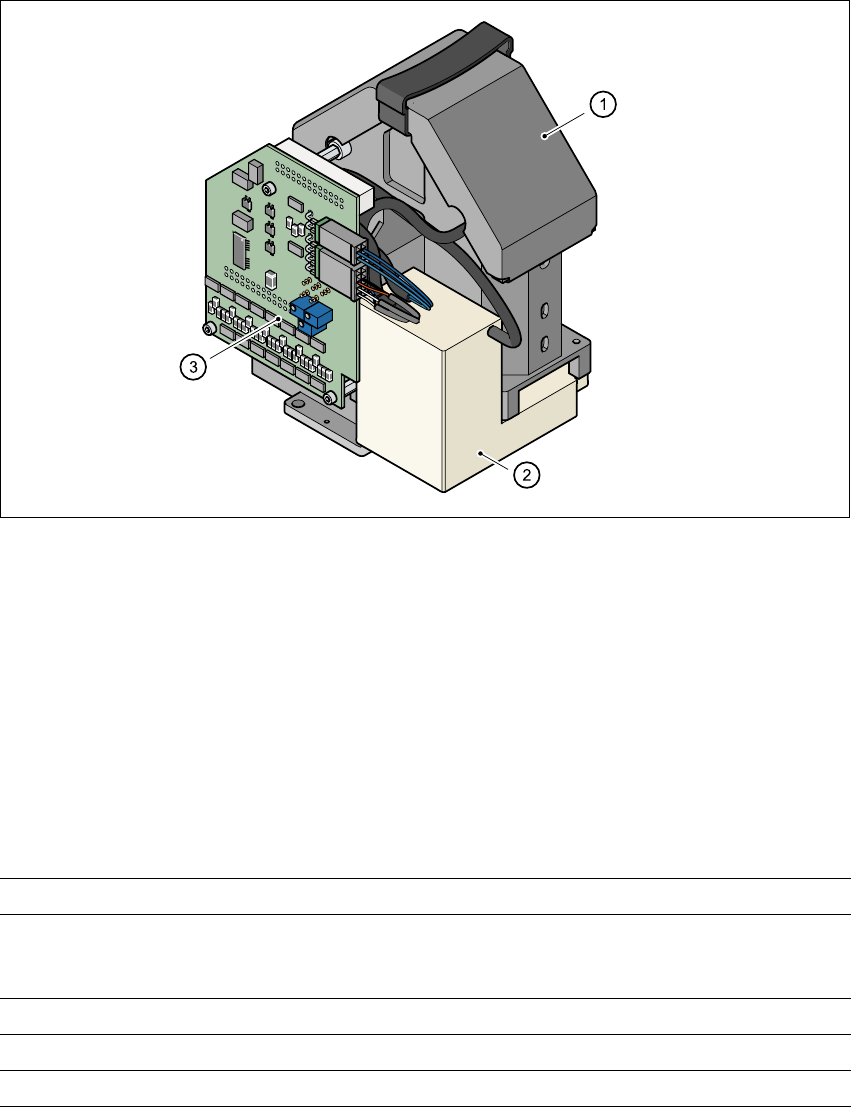
3.9.1 Komponentide tehisnägemismoodul (standardne kaamera)
12-segmendilisel Collect&Place tööpeal
3.9.1.1 Ehitus
3
Joon. 3.9 - 1 Komponentide tehisnägemismoodul (standardne kaamera) 12-segmendilisel
Collect&Place tööpeal
3
(1)Komponentide kaamera, optika ja valgustus
(2)Kaamera võimendi
(3)Valgustuse reguleerimine
3.9.1.2 Tehnilised andmed
3
Komponentide mõõdud 0,5 mm x 1,0 mm kuni 18,7 mm x 18,7 mm
Komponentide tüübid 0402 kuni PLCC44
k.a BGA, µBGA, pöördkiibid, TSOP, QFP
PLCC, SO kuni SO32, DRAM
Väljaviikude min. samm 0,5 mm
Vaateväli 24 mm x 24 mm
Valgustusviis Eestvalgustus (3 programmeeritavat nivood)
3 Tehnilised andmed Kasutusjuhend SIPLACE HS-60
3.9 Ülevaade moodulitest - tehisnägemismoodulid Tarkvara versioon SR.503.xx 07/2003 EE väljaanne
94
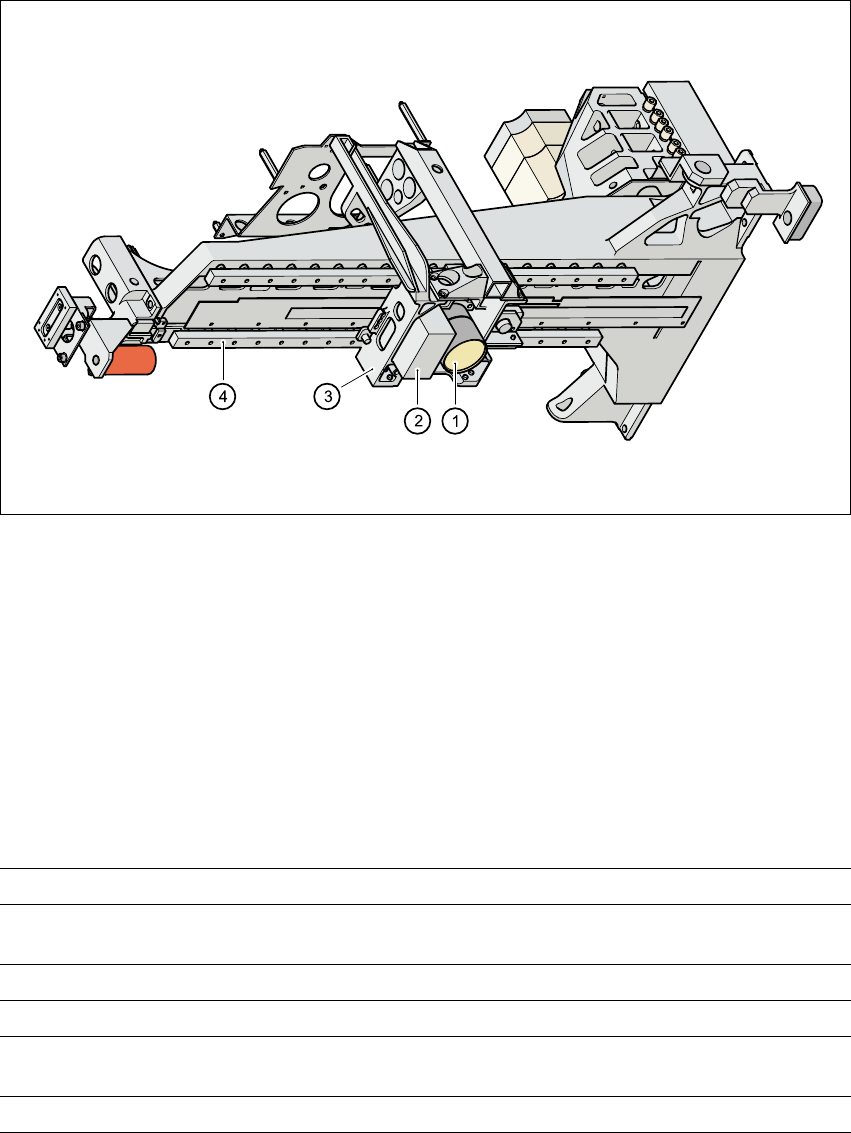
3.9.2 Trükiplaatide tehisnägemismoodul (standardne kaamera)
3.9.2.1 Ehitus
3
Joon. 3.9 - 2 Trükiplaatide tehisnägemiskaamera (standardne), portaal - altvaade
3
(1) Trükiplaatide kaamera, optika ja valgustus
(2) Kaamera võimendi
(3) Tööpea hoidaja
(4) Portaal
3.9.2.2 Tehnilised andmed
Koordinaatmärgid Kuni 3 ühe ladumisprogrammi kohta
Teegi suurus Kuni 255 koordinaatmärgi tüüpi - süsteemi
koordinaatmärke ≥ 249
Kujutise töötlus Geomeetriline trasseerimine
Valgustusviis Eestvalgustus
Tuvastusaeg koordinaatmärgi / halva
koordinaatmärgi kohta
0,4 s
Vaateväli 5,7 mm x 5,7 mm
Kasutusjuhend SIPLACE HS-60 3 Tehnilised andmed
Tarkvara versioon SR.503.xx 07/2003 EE väljaanne 3.10 Ülevaade moodulitest - trükiplaatide konveier
95
3.10 Ülevaade moodulitest - trükiplaatide konveier
3.10.1 Kirjeldus
Ladumissüsteemi standardne versioon on varustatud ühe ühelindilise konveieriga. Võimalik on
tellida ka kaksikkonveieriga süsteem. Konveieri statsionaarse poolena saab vastavalt vajadusele
kasutada nii vasakut kui ka paremat poolt.
Laotavad trükiplaadid kinnitatakse lindi alumisle küljele. Seetõttu jääb trükiplaadi pealmise pinna
ja ladumispea vaheline kaugus konstantseks kõikide trükiplaatide jaoks ning ei sõltu trükiplaatide
kõrgusest. Nii ei sõltu ka ladumise kiirus trükiplaadi kõrgusest. Optimeerida saab ka trükiplaatide
koordinaatmärkide järgi tsentreerimist. Kuna seetõttu jääb trükiplaadi pinna ja trükiplaatide
kaamera vaheline kaugus konstantseks, siis on trükiplaatide kaamera alati teravustatud
trükiplaadi pinnale ühesuguse teravusega. Trükiplaadi koordinaatmärgid paigutatakse
optimaalselt trükiplaatide kaamera CCD suhtes.
Trükiplaatide konveieri laiust seatakse ja jälgitakse integraalse juhtahela abil. Seda saab
aktiveerida programmi väljakutsumise abil. Juhtahel käitab samm-mootoreid kuni soovitud laiuse
saavutamiseni. Seetõttu ei sõltu laiuse reguleerimine masina teistest komponentidest. 3
Muuta saab ka trükiplaatide transpordikõrgust, mis võimaldab masinad ühendada liiniks
transpordikõrgusega 830, 900, 930 või 950 mm. Individuaalsete süsteemide trükiplaatide
konveierite vaheline andmeside toimub vastavalt valikule SIEMENSi või SMEMA liideste abil. Nii
kaksikkonveieri kui ka ühelindilise konveieri statsionaarne pool võib asuda vasakul või paremal
poolel. Sellise konveierite korral saab statsionaarseid pooli hõlpsasti ümber lülitada
(parempoolset vasakuks ja vastupidi).
Trükiplaatide konveieri tööd jälgitakse ja juhitakse optiliste andurite abil. Trükiplaadi jõudmisel
ladumistsooni ja möödumisel valgustõkkest toimub selle pidurdamine. Trükiplaadi asend
määratakse laserkiirest moodustatud valgustõkke abil. Niipea kui trükiplaat jõuab sihtkohta,
konveierilint seiskub ja plaat fikseeritakse altpoolt. 3