FX3_MSP_Rev1.0_C.pdf - 第32页
Rev1.00 MS 参数 3-2 3-1 激光偏移量 3-1-1 功能 本项目用于取得基板上面高度、 激光高度、吸嘴旋转中心、 Head 角度偏移量。 ※ 更换吸嘴时,会出现有无送料器的询问,一旦选择 “ 无送料器 ” ,则在发生错误之前不再询 问有无送料器。 ※ 进行校准台上是否放有 模具等的确认时,请点击 “Head 退避 ” 按钮再进 行确认。 3-1-1-1 基板上面高度和激光高度 基板上面高度,是取得从校准台 上面到各 He…
Rev1.00
MS 参数
3-1
3. 偏移量
“Head偏移量”、“激光偏移量”、“ATC偏移量”取得MS参数所花费的时间要比其他偏移量多,为此
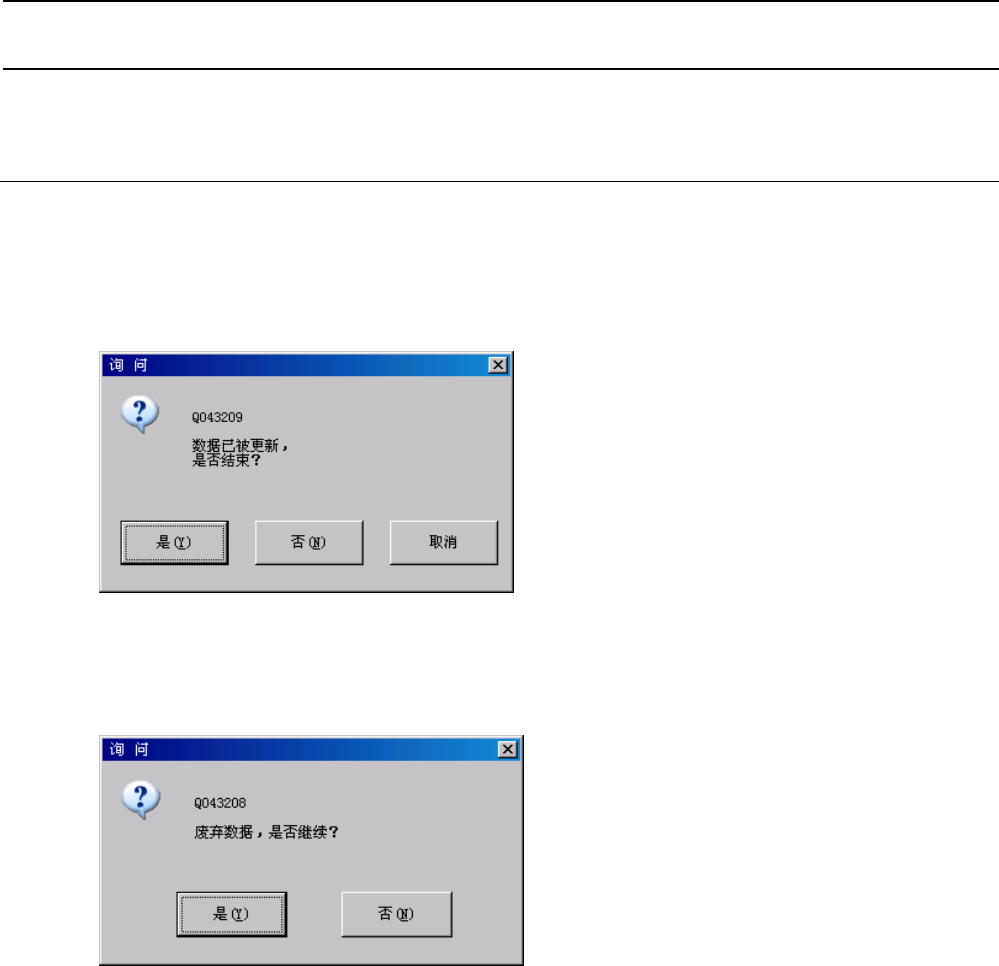
当其值发生过变更时,会显示以下信息用于确认。
① 进行了数据变更,要退出对话框时,如选择“确定”按钮,将显示以下的问询信息。
如要保存数据,请选择“是”,结束对话框。
如不要保存数据,请选择“否”或“取消”。
② 进行了数据变更,要退出对话框时,如选择了“取消”按钮,将显示以下的问询信息。
如要废弃数据,请选择“是”,结束对话框。
如不要废弃数据,请选择“否”。
Rev1.00
MS 参数
3-2
3-1 激光偏移量
3-1-1 功能
本项目用于取得基板上面高度、激光高度、吸嘴旋转中心、Head角度偏移量。
※ 更换吸嘴时,会出现有无送料器的询问,一旦选择“无送料器”,则在发生错误之前不再询
问有无送料器。
※ 进行校准台上是否放有模具等的确认时,请点击“Head退避”按钮再进行确认。
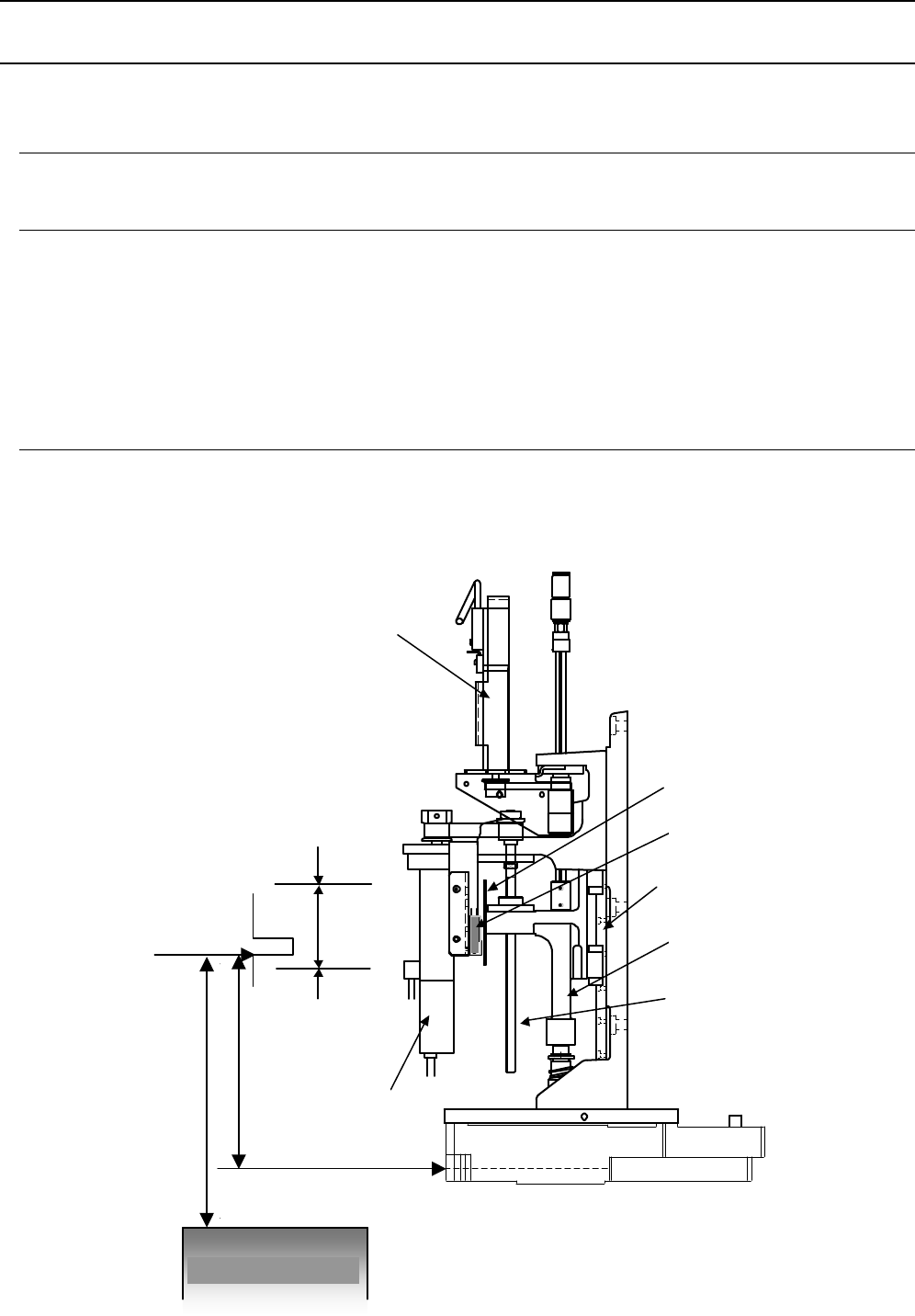
3-1-1-1 基板上面高度和激光高度
基板上面高度,是取得从校准台上面到各Head之Z轴原点位置的尺寸。
激光高度,是取得从各Head之Z轴原点位置到激光传感器之测量高度的尺寸。
图3-1-1-1 基板上面高度
θモータ
Zモータ
リニアガイド
Z軸スライドシャフト
ボールネジ
原点センサ
センサドグ
キャリブレーションブロック
Z軸原点位置
原点センサ
ON領域
原点センサ
OFF領域
原点センサ
OFF領域
基板上面高さ
エンコーダ
Z相信号
θ马达
原点传感器
OFF区域
编码器
Z相信号
Z轴原点位置
原点传感器
ON区域
原点传感器
OFF区域
Z马达
校准块
传感器碰块
原点传感器
直线导轨
Z轴滑动轴
滚珠丝杠
基板上面高度
激光高度
Rev1.00
MS 参数
3-3
3-1-1-2 吸嘴旋转中心
吸嘴旋转中心,是取得各Head之轴的旋转中心位置位于激光传感器的哪个位置。
图3-1-1-2 吸嘴旋转中心
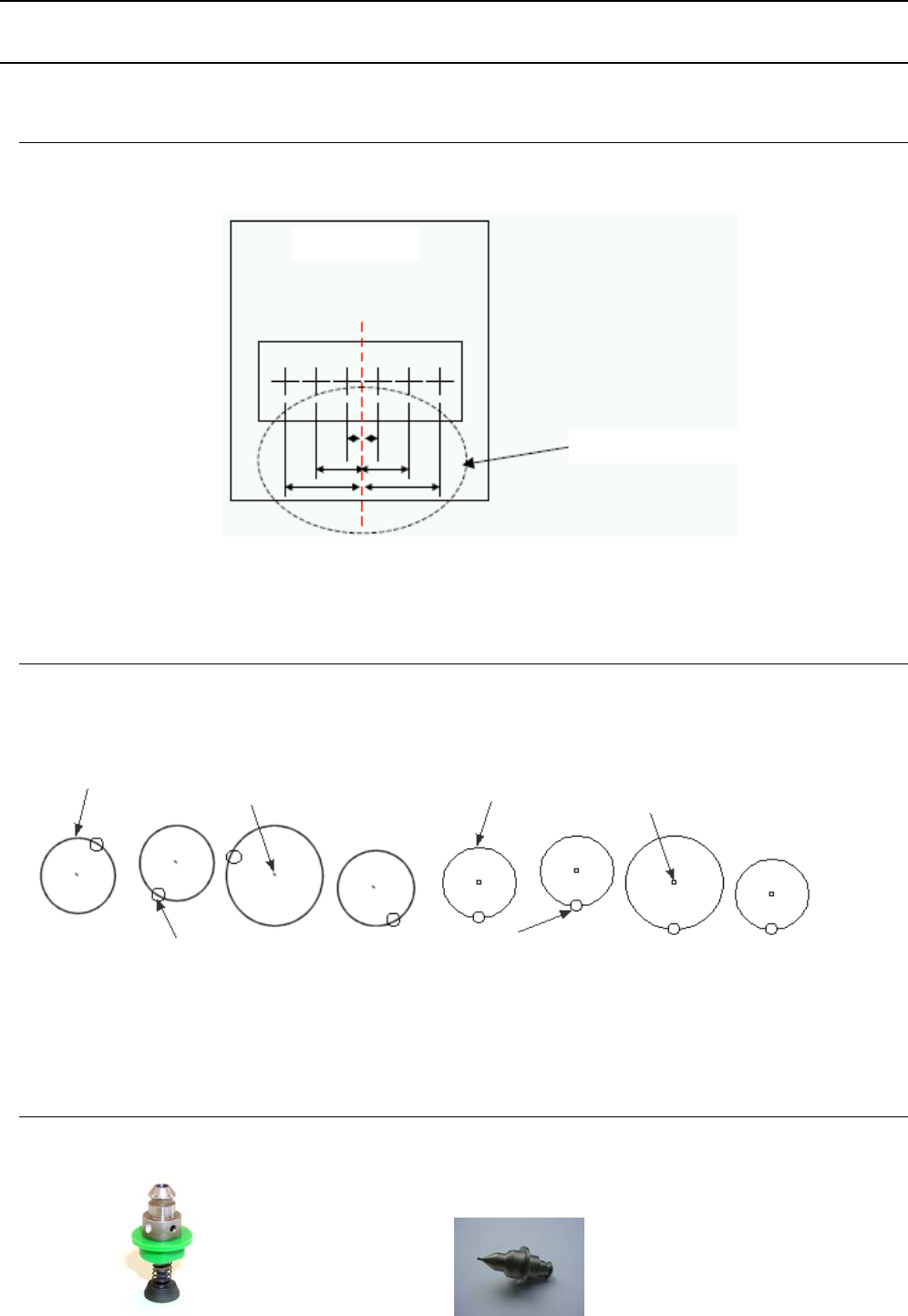
3-1-1-3 角度偏移量
角度偏移量,是为了使轴的旋转偏摆方向与所有的吸嘴相一致而从轴的虚拟原点取得角度。
轴的转动轨迹
轴的转动中心
临时原点时的轴位置
轴位置
轴的转动中心
轴的转动轨迹
<取得角度偏移量前的原点复位后情况> <取得角度偏移量后的原点复位情况>
图3-1-1-3 角度偏移量
3-1-2 使用模具
• 508吸嘴(40001346) • 模具吸嘴LNC Head用(40046647)
LNC60 Head
吸嘴旋转中心(L1~L6)