1OM-1750-003w_G5S.pdf - 第86页
1OM-1750 1-36 1302-001 4.1 基板の搬入 前工程装置から流れてきた基板は基板位置決め部まで送られます。 基 板 基板位置決め L 部 基板位置決め R 部 基板供給部 基板排出部 F1A31 4.2 基板の位置決め 基板は、基板位置決め部の搬送基板検出センサで検知され、位置決めされ ます。 基 板 基 板 基板位置決め L 部 基板位置決め R 部 基板供給部 基板排出部 基板検出センサファイバー 基板検出ミラー…
1OM-1750
1-35
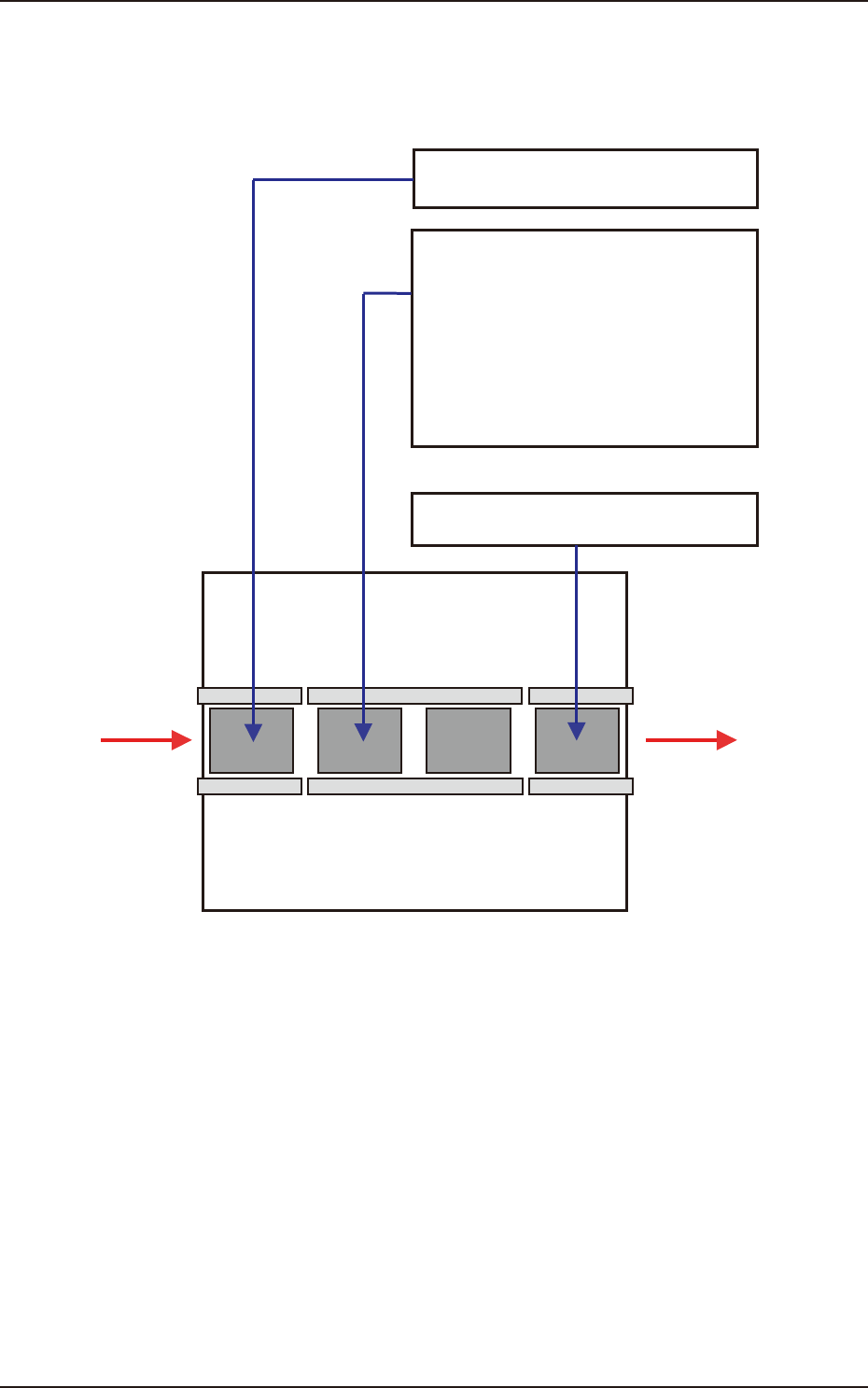
4. 表面実装のしくみ
部品を基板上に表面実装するしくみを簡単に説明します。
前工程 後工程
基板供給部
基板位置決めL部 基板位置決めR部 基板排出部
基板の搬入 4.1
基板の位置決め 4.2
基板の認識 4.3
部品の供給 4.4
部品の吸着 4.5
部品認識 4.6
部品の装着 4.7
基板の搬出 4.8
1 章
1 章
1 章
1 章
1 章
1 章
1 章
1 章
表面実装の流れ
F1A30
1302-001
4. 表面実装のしくみ
1OM-1750
1-361302-001
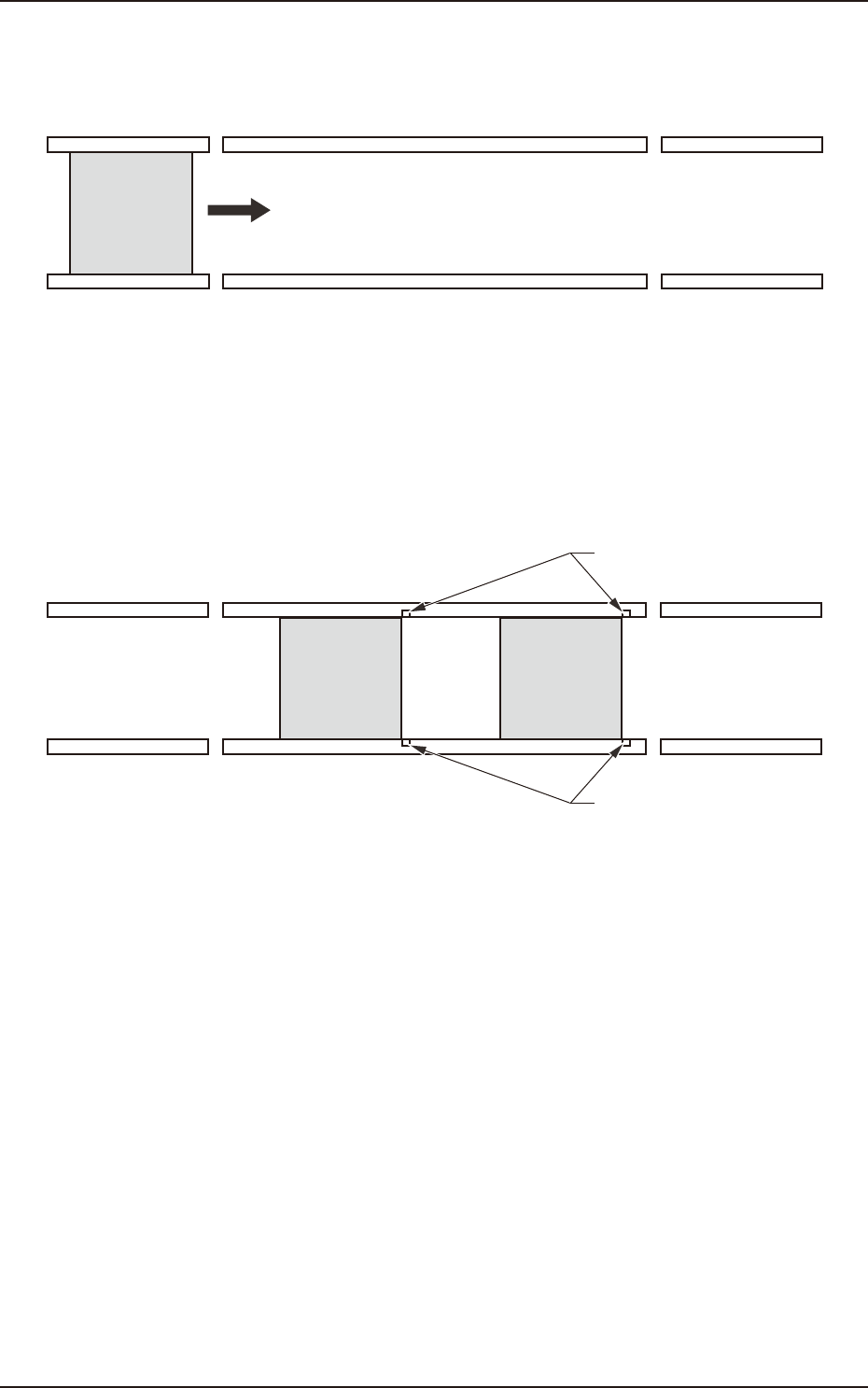
4.1 基板の搬入
前工程装置から流れてきた基板は基板位置決め部まで送られます。
基 板
基板位置決め L 部 基板位置決め R 部基板供給部 基板排出部
F1A31
4.2 基板の位置決め
基板は、基板位置決め部の搬送基板検出センサで検知され、位置決めされ
ます。
基 板 基 板
基板位置決め L 部 基板位置決め R 部
基板供給部 基板排出部
基板検出センサファイバー
基板検出ミラー
F1A32
4.1 基板の搬入
1OM-1750
1-371302-001
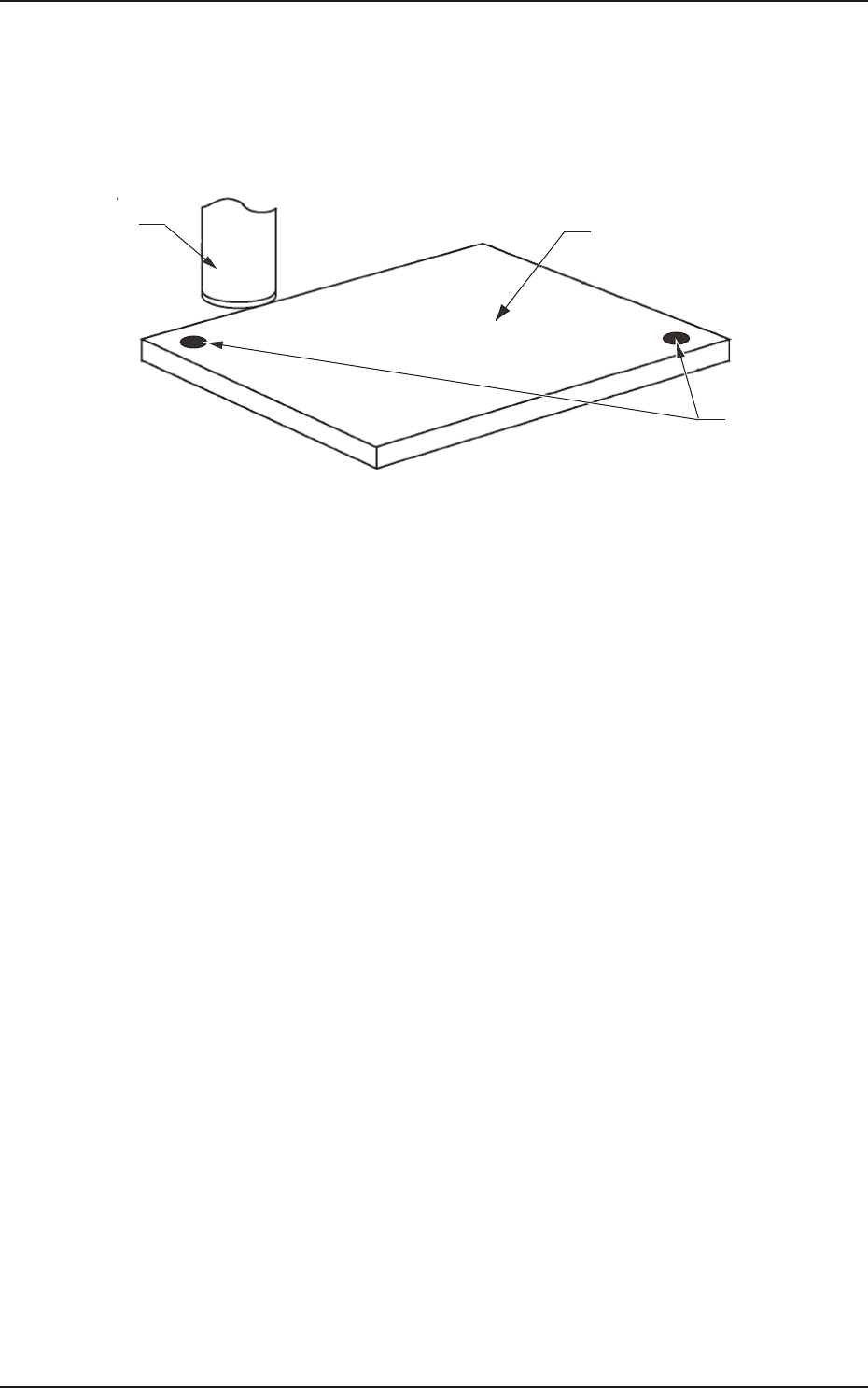
4.3 基板の認識
基板認識カメラによって基板上に設けられた基板認識マークが検出され、
認識マークの座標データとの位置ズレの量が算出されて、部品装着位置が
補正されます。
基 板
基板認識カメラ
基板認識マーク
基板の認識 F1A33
4.4 部品の供給
フィーダベースの上にセットされているテープフィーダが、部品を供給位
置に送り出します。
装着ヘッドは、XY ビームによって X 方向および Y 方向へ移動し、吸着ノ
ズルの着脱、部品の吸着、基板への部品装着などを行います。
4.5 部品の吸着
装着ヘッドに取付けられている吸着ノズルで部品を吸着します。
4.3 基板の認識