CM402_Manual.pdf - 第65页
P a ge 6 -13 22. 按住 UNLOCK + 點選 [ R eco g n i t i o n ] • 在辨識畫面顯示辨識結果 ∗ 如果辨識結果(ANS=)還不到辨識率(在機器 參數所設定的缺陷標準),再次執行步驟 6 到23,變更辨識位置點等等。 23. 點選 [ C o m p l e t e]. • 教示完成 24. 按住 UNLOCK + 點選 [ C o n t i n u ous r eco g ] ( 檢查 )…
Page 6-12
15.
設定在BL1要辨識的區域
•
點選
按鈕調整大小
設定包含要辨識的位置(在步驟11所設定的)
的區域
16.
點選 [Complete]
•
資料自動儲存
17.
重複步驟11到16,直到 BL4完成
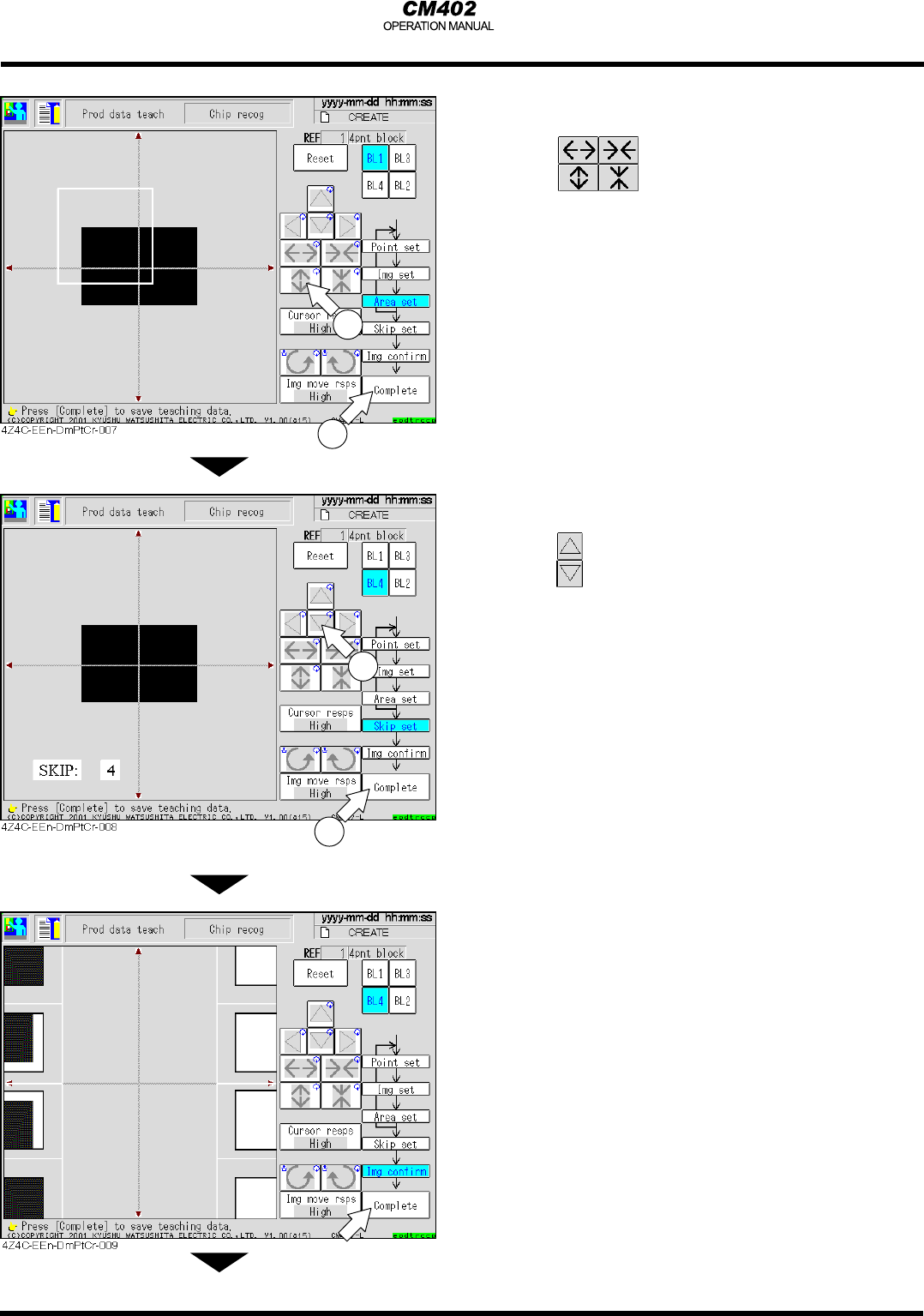
18.
設定要跳過的值
•
點選
設定其值
要辨識的圖像會在值 1時為詳細的搜尋而在
值為 10時粗略的搜尋(正常值為: 4)。
最後,偵測完成辨識的圖像,其 SKIP值應
為 1。
在辨識過程中,影像從設定的值開始搜尋,
最後在SKIP值為1時偵測到位置。
19.
點選 [Complete]
•
顯示每個區塊教示過的圖像
20.
檢查教示圖像
•
畫面左側:辨識的位置(位置點的設定)
畫面右側:辨識的圖像區域(圖像設定)
21.
點選 [Complete]
•
每個區塊的教示完成
到下一頁
1
2
1
2
Page 6-13
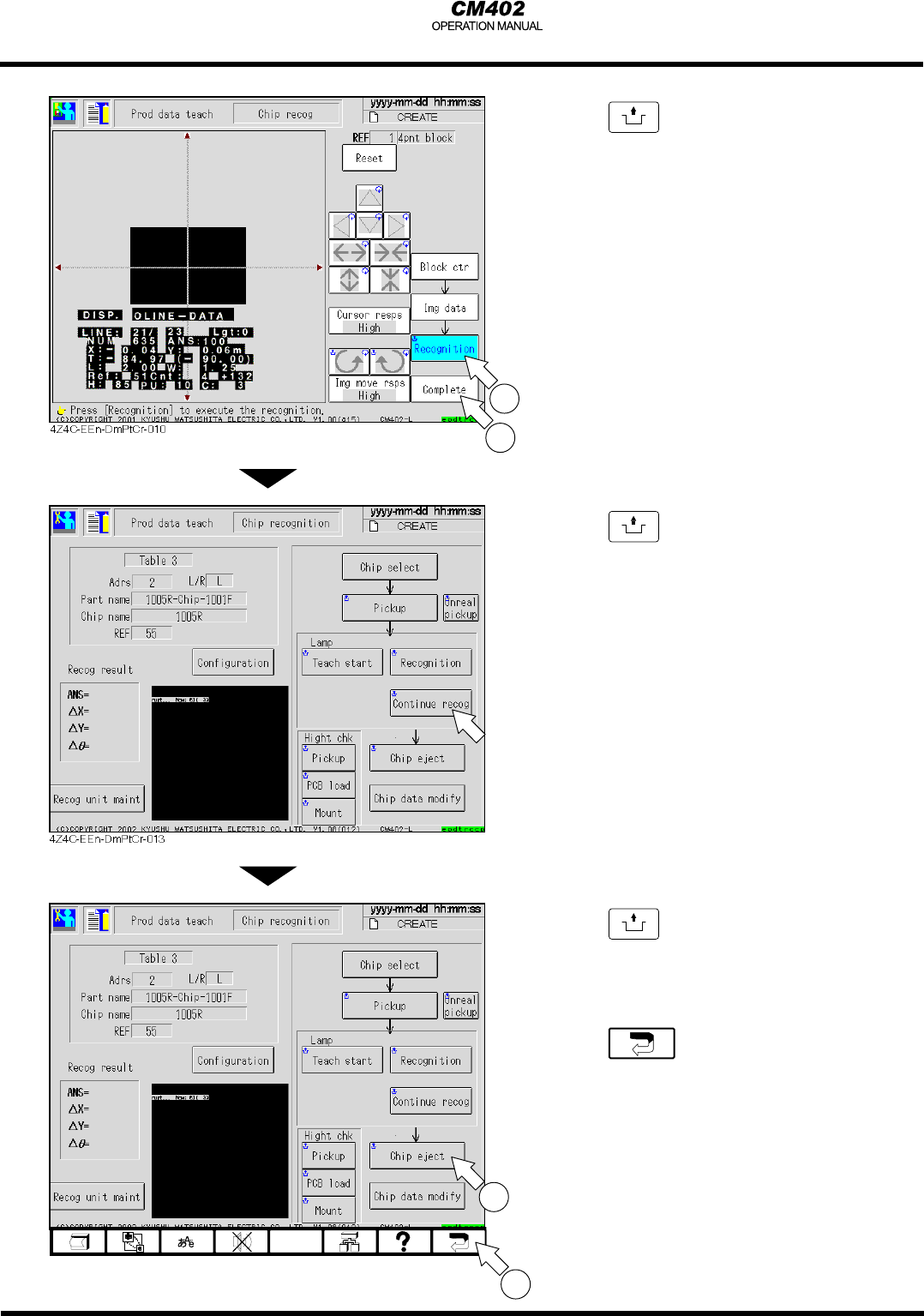
22.
按住
UNLOCK
+
點選 [Recognition]
•
在辨識畫面顯示辨識結果
∗
如果辨識結果(ANS=)還不到辨識率(在機器
參數所設定的缺陷標準),再次執行步驟 6
到23,變更辨識位置點等等。
23.
點選 [Complete].
•
教示完成
24.
按住
UNLOCK
+
點選 [Continuous recog]
(
檢查)
•
一次執行十次的辨識動作並顯示結果,
然後檢查結果,點選[ESC]關閉顯示結
果。(因為此項操作只是用來檢查,通
常不須執行)
∗
如果辨識結果(ANS=)還不到辨識率(在機器
參數所設定的缺陷標準),再次執行步驟 6
到23,變更辨識位置點等等。
25.
按住
UNLOCK
+
點選 [Chip eject]
•
用來辨識的零件排到廢料盒
26.
點選
此功能鍵
•
區分四個區塊配對辨識教示結束
•
同時,教示過的資料上傳到 PT。
1
2
4Z4C-EEn-DmPtCr-013
1
2
Page 6-14
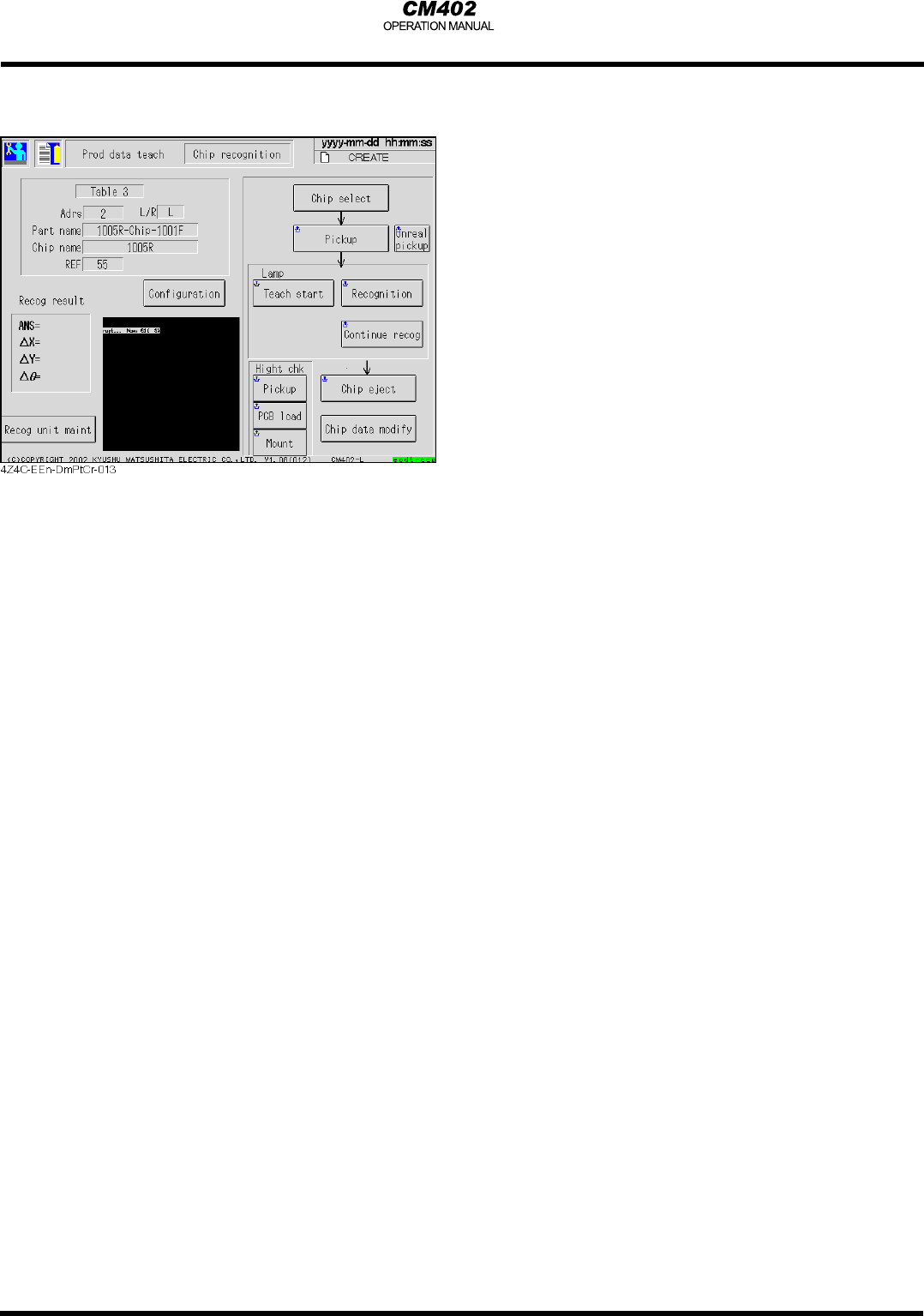
6.2.4 其他操作
[ Unreal pickup ] (不真實的吸著)
當要作零件辨識教視的零件不在料捲上,或是
要教示放在托盤上的零件而托盤無法動作,使
用這個功能。
∗
當點選此按鈕,工作頭移動到零件排出位置,
並且變成真空狀態,然後用手讓零件吸著,並
且開始教示。
‘Height chk’ (高度檢查)
用來檢查裝著或吸著高度。
•
[Pickup] (吸著)
將工作頭下降到選擇零件的吸著高度。
•
[PCB load] (基板導入)
導入符合目前生產資料大小的基板。
•
[Mount]
(裝著)
將吸著的零件降低到裝著高度,假設會裝著
在符合目前生產資料大小的基板的中央。