FX-3_Maintenance_Rev2_C.pdf - 第20页
Rev 2.00 维修调整要领书 2-5 2-2. 马达的更换 2-2-1 . Z 马达的更换 更换了 Z 马达之后, 需要进行 Z 轴原点的位置调整, 以及 Z 轴高度有关、 激光有关的 MS 参数。(输入 项目请参照 2-8 项。) 1 ) 把 Z 电动机扎线从动力插头 底部, Z 编码器中转基板中 拆下。 (参照 2-1 项 2 )、 4 )、 5 )、 7 )) 2 ) 先拧松 Z 电动机皮带轮的 ① 小螺钉(× 2 )。 3 …
Rev 2.00
维修调整要领书
2-4
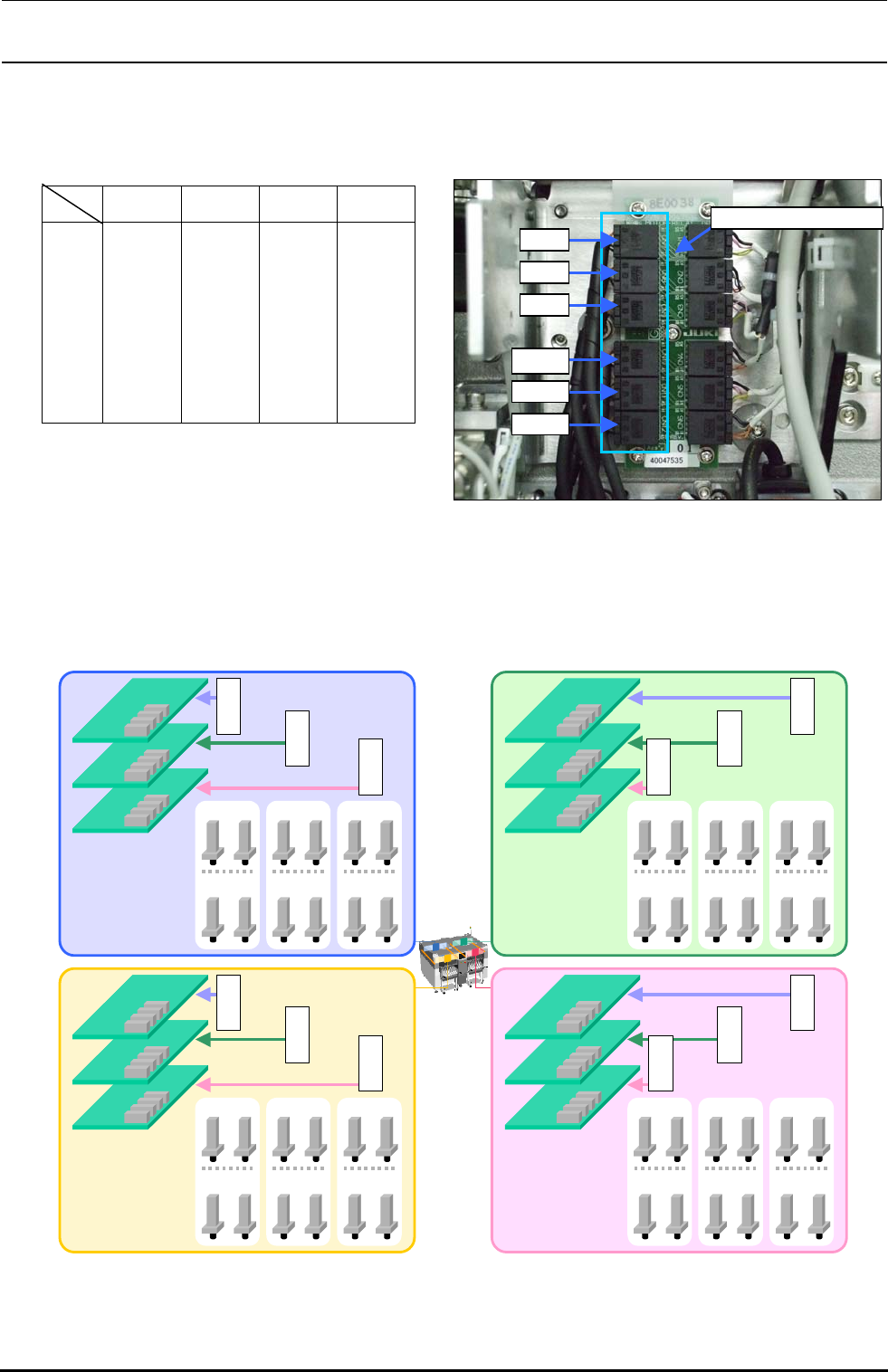
【与电动机继电器电路板连接的 Z 电动机编码器电缆连接器的连接位置】
※ 各连接器以贴装头№记述。
LF 贴装头 RF 贴装头 LR 贴装头 RR 贴装头
CN7
CN8
CN9
CN10
CN11
CN12
L1
L2
L3
L4
L5
L6
L6
L5
L4
L3
L2
L1
L1
L2
L3
L4
L5
L6
L6
L5
L4
L3
L2
L1
※ 与电源插座之中继线连接的 Z 电动机电源电
缆的连接顺序与上述相同。
图 2-1-11 电动机继电器电路板
【与 ZT 驱动器电路板连接的 θ 电动机电缆连接器的连接位置】
※ 各连接器以贴装头№记述。
※ θ电动机电源电缆和θ电动机编码器电缆请参照下图分别连接。
图 2-1-12 从软件上看到的 Z/θ驱动器和电动机配置关系图
CN7
CN8
CN9
CN10
CN11
CN12
电动机继电器电路板
LR
第1軸
第2軸
第3軸
第4軸
θ5 θ6
Z5 Z6
θ3 θ4
Z3 Z4
θ1 θ2
Z1 Z2
θ1
Z1
θ2
Z2
θ3
Z3
θ4
Z4
θ5
Z5
θ6
Z6
LF
第1軸
第2軸
第3軸
第4軸
θ5 θ6
Z5 Z6
θ3 θ4
Z3 Z4
θ1 θ2
Z1 Z2
θ2
Z2
θ1
Z1
θ4
Z4
θ3
Z3
θ6
Z6
θ5
Z5
RR
第1軸
第2軸
第3軸
第4軸
θ5 θ6
Z5 Z6
θ3 θ4
Z3 Z4
θ1 θ2
Z1 Z2
θ5
Z5
θ6
Z6
θ1
Z1
θ2
Z2
θ3
Z3
θ4
Z4
RF
第1軸
第2軸
第3軸
第4軸
θ5 θ6
Z5 Z6
θ3 θ4
Z3 Z4
θ1 θ2
Z1 Z2
θ2
Z2
θ1
Z1
θ4
Z4
θ3
Z3
θ6
Z6
θ5
Z5
Rev 2.00
维修调整要领书
2-5
2-2. 马达的更换
2-2-1. Z马达的更换
更换了Z马达之后,需要进行 Z 轴原点的位置调整,以及 Z 轴高度有关、激光有关的 MS 参数。(输入
项目请参照 2-8 项。)
1) 把 Z 电动机扎线从动力插头
底部,Z 编码器中转基板中
拆下。
(参照 2-1 项 2)、4)、5)、
7))
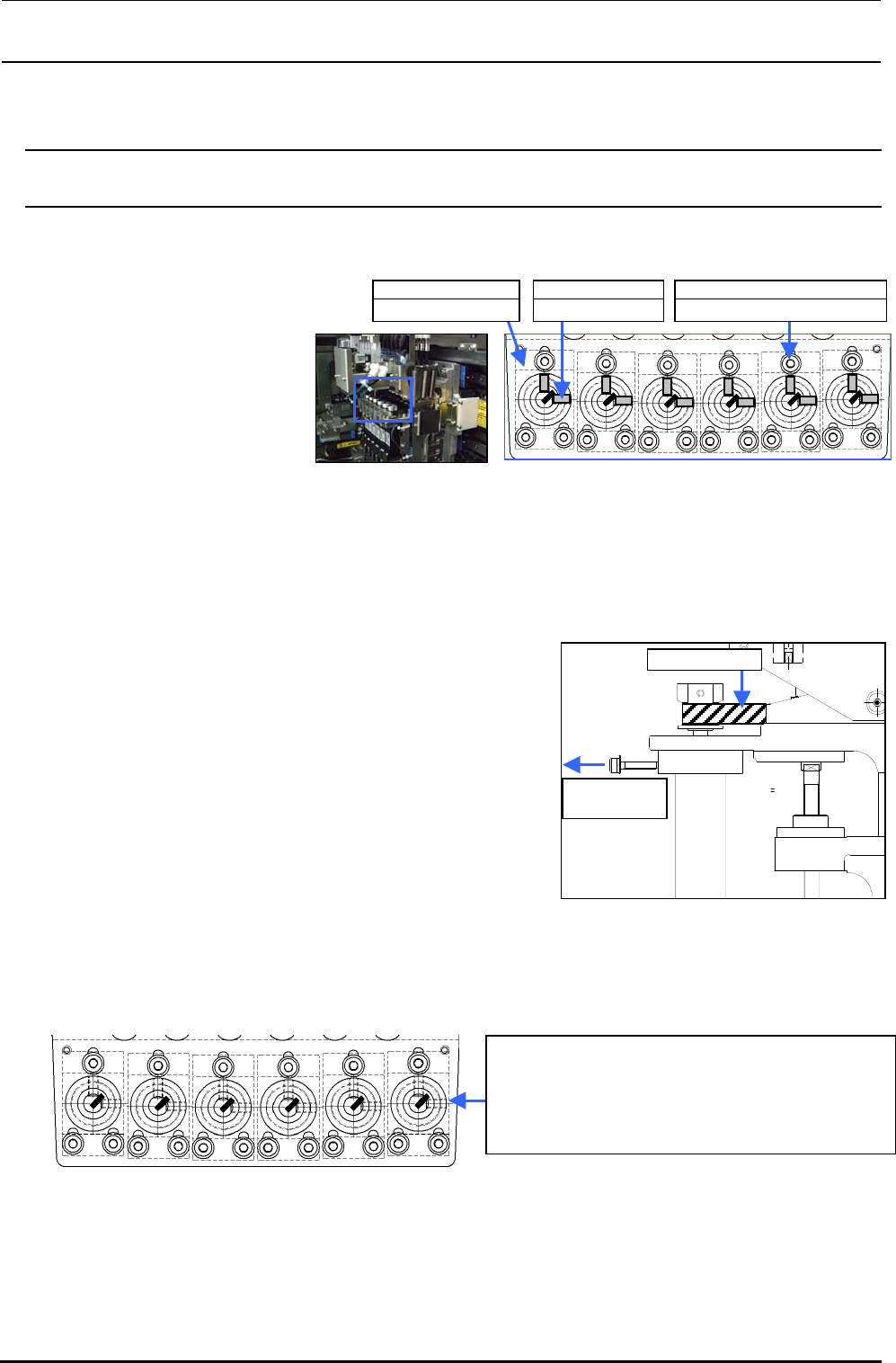
2) 先拧松 Z 电动机皮带轮的①小螺钉(×2)。
3) 先拆下皮带轮安装用的②带垫片内六角螺钉(×3)。然后再边取出皮带轮边拆卸 Z 电动机。
4) 按照相反的顺序进行安装,最后进行皮带张力的调整。
<皮带张力调整步骤>
① 把螺丝插到 Z 马达的螺丝孔,朝箭头方向用杆张力 21.6N
(2.2kgf)的拉力,用安装螺丝固定。
张力计设置值(设计值)
• 张力计输入值
Weight:0.9g/m、Width:8.0mm、Span:45mm
• 规格值: 10.5±1N
※ 在 Z 马达安装螺丝(3 个)上涂上锁定漆 242 后,拧紧固
定,转矩为 2.3N y m。
※ 固定 Z 马达皮带轮的固定螺丝时,
应注意 Z 马达轴的平部和皮带轮固定螺丝的方向。固定螺丝的紧
固转矩为 0.5N y m。
图 2-2-1-3 Z 电动机皮带轮的组装方法
图 2-2-1-1 Z电动机组装部(俯视图)
①SM8030312TP
止动螺钉 M3
②SL6031692TN
带垫片内六角螺栓 M3×16
40044534
伺服电动机 30W(Z 轴)
同步皮带 Z
21.6N (2.2kgf)
拉
在将 Z 轴抬到最上面的状态下,如果按左图所示,
在轴标记为 2 点钟方向的位置或者轴的 D 形切面
为图示的位置时将 Z 马达皮带轮固定,即达到 2)
项的条件。
Rev 2.00
维修调整要领书
2-6
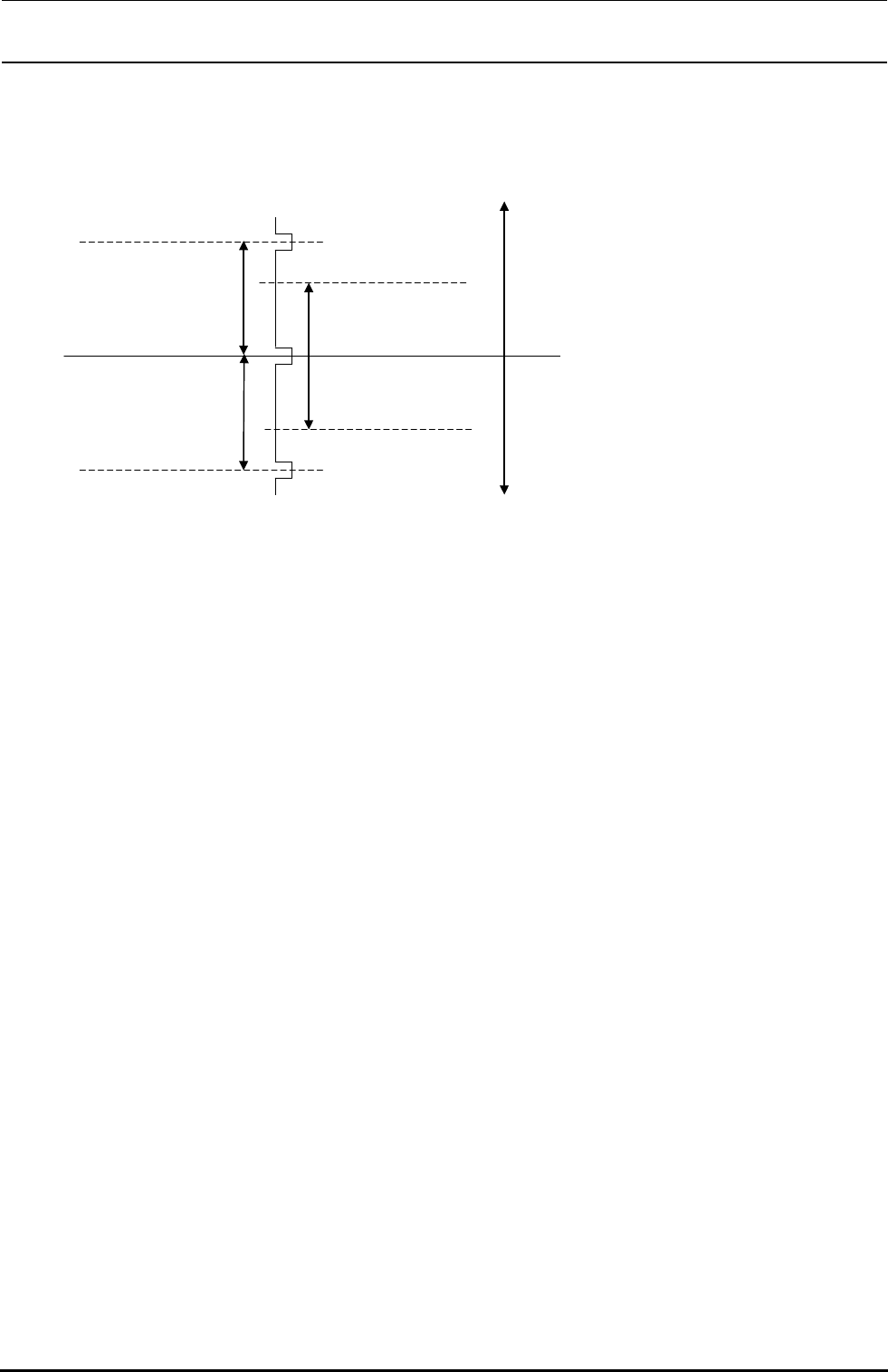
② 组装后,请获取 MS 参数的基板上面高度。
如果这一值不在-2~+2mm 之间,请重新调整 Z 电动机轴与滚珠螺杆的位置关系,再次取得 MS 参
数,并确认基板上面高度在-2~+2mm 之间。
图 2-2-1-4 Z 电动机编码器和 Z 传感器的位置关系
Z 轴球螺丝转动
1 圈的行程: 6mm
Z 传感器 OFF 区域
-2~+2mm 稳定区域
Z 传感器 ON 区域
Z 传感器高度
θ电动
机
编码器 Z 相