Administrator’s Guide-Chinese(SM320).pdf - 第110页
Samsung Component Placer SM320 Administrator ’ s Guide < 吸嘴 2> 组合框 表示吸着部品的辅助吸嘴。不能 使用主吸嘴时,使用辅助 吸嘴。 同样。 域 取 时的 X 轴方向的允许误 差。 取 时的 Y 轴方向的允许误 差。 时重新吸着的次数。可选 择的次数为 1~3 次。 料 时的各种延时时间。 束下降动作后停止到重新上升开 始的时间。 下降动作后停止到重新上升…
元件的登记
7-7
Common Data
图
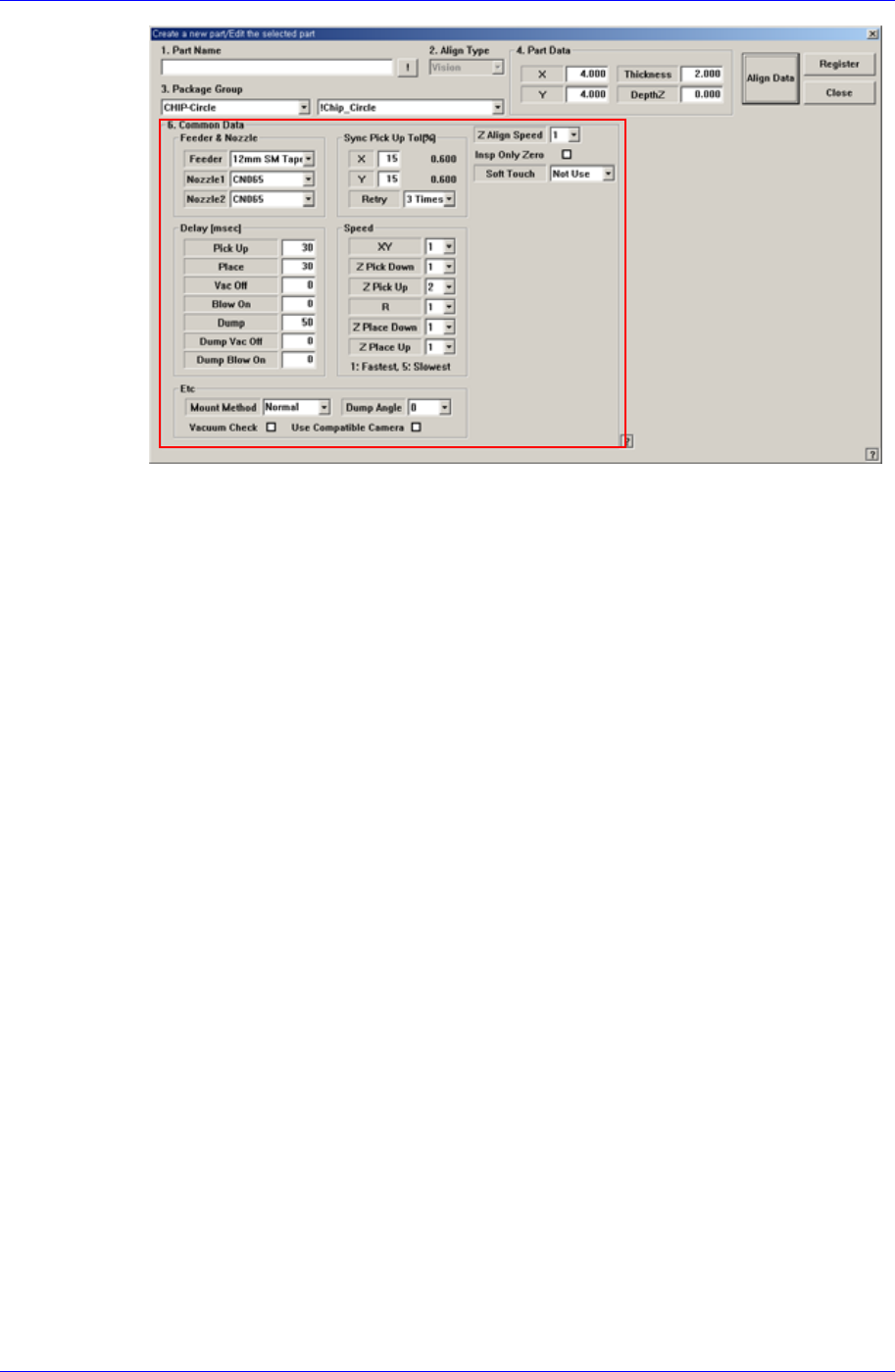
7-5. “
建立新的元件
/
编辑所选元件
-
公共数据
”
对话框
<喂料器&吸嘴> 领域
<喂料器> 组合框
选择将供应部品的喂料器形式。可选择的喂料器
形式如下。
8mm 带式: 用8mm SM带式喂料器供应部品。
12mm 带式: 用12mm SM带式喂料器供应部品。
16mm 带式: 用16mm SM带式喂料器供应部品。
24mm 带式: 用 24mm SM 带式喂料器供应部品。
32mm 带式: 用 32mm SM 带式喂料器供应部品。
44mm 带式: 用 44mm SM 带式喂料器供应部品。
56mm 带式: 用56mm SM带式喂料器供应部品。
SM带式喂料器供应部品。
用Stack 管式喂料器供应部品。
Single Tray: 用Single 盘式喂料器供应部品。
20 级盘式喂料器供应部品。
用 12 级盘式喂料器供应部品。
XS: 用 24 级盘式喂料器供应部品。
: 用 24 级盘式喂料器供应部品。
着吸嘴的种类如下。
, CN065, CN140, CN220, CN400N, CN750, CN110)
72mm 带式: 用 72mm
Stack 管式:
Belt Multi 管式: 用 Belt Multi 管式喂料器供应部品。
FW-20F: 用
FW-20S: 用 20
级盘式喂料器供应部品。
FW-12M:
FW-24
FW-24NS
<吸嘴1> 组合框
表示吸着部品的主吸嘴。吸
(CN030, CN040

Samsung Component Placer SM320 Administrator’s Guide
<吸嘴2> 组合框
表示吸着部品的辅助吸嘴。不能使用主吸嘴时,使用辅助吸嘴。
同样。
域
取 时的X轴方向的允许误差。
取 时的Y轴方向的允许误差。
时重新吸着的次数。可选择的次数为1~3次。
料 时的各种延时时间。
束下降动作后停止到重新上升开始的时间。
下降动作后停止到重新上升开始的时间。
下 间。
编辑框
磁头完成下降停止后的从Vacuum Off
时开始到Blow
间。
sec单位间隔)
时,从头结束下降动作后停止到重新上升开始的时间。
时,从头结束下降动作后停止到关闭真空的时间。
件时,磁头完成下降停止后的从 Vacuum Off 时开始到
为止的时间。
吸嘴的种类与主吸嘴
<Sync Pick Up Tol[%]>领
<同步吸取X> 编辑框
以百分比设定同时 吸
<同步吸取Y> 编辑框
以百分比设定同时 吸
<重试> 组合框
设定没有吸着到部品
<延时> 领域
设定进行 吸取, 贴装, 废
<吸取> 编辑框
吸取部品时,从Head结
<贴装> 编辑框
贴装部品时,从头结束
<真空关闭> 编辑框
贴装部品时,从头结束 降动作后停止到关闭真空的时
<Blow On>
1) 部件贴装时,
On 为止的时
2) 单位 : msec (可设置成10 m
<废料> 编辑框
废料部品
<废料真空关闭> 编辑框
废料部品
<Dump Blow On> 编辑框
1) 废弃部
Blow On
2) 单位 : msec (可设置为10 msec单位间隔)
7-8
元件的登记
7-9
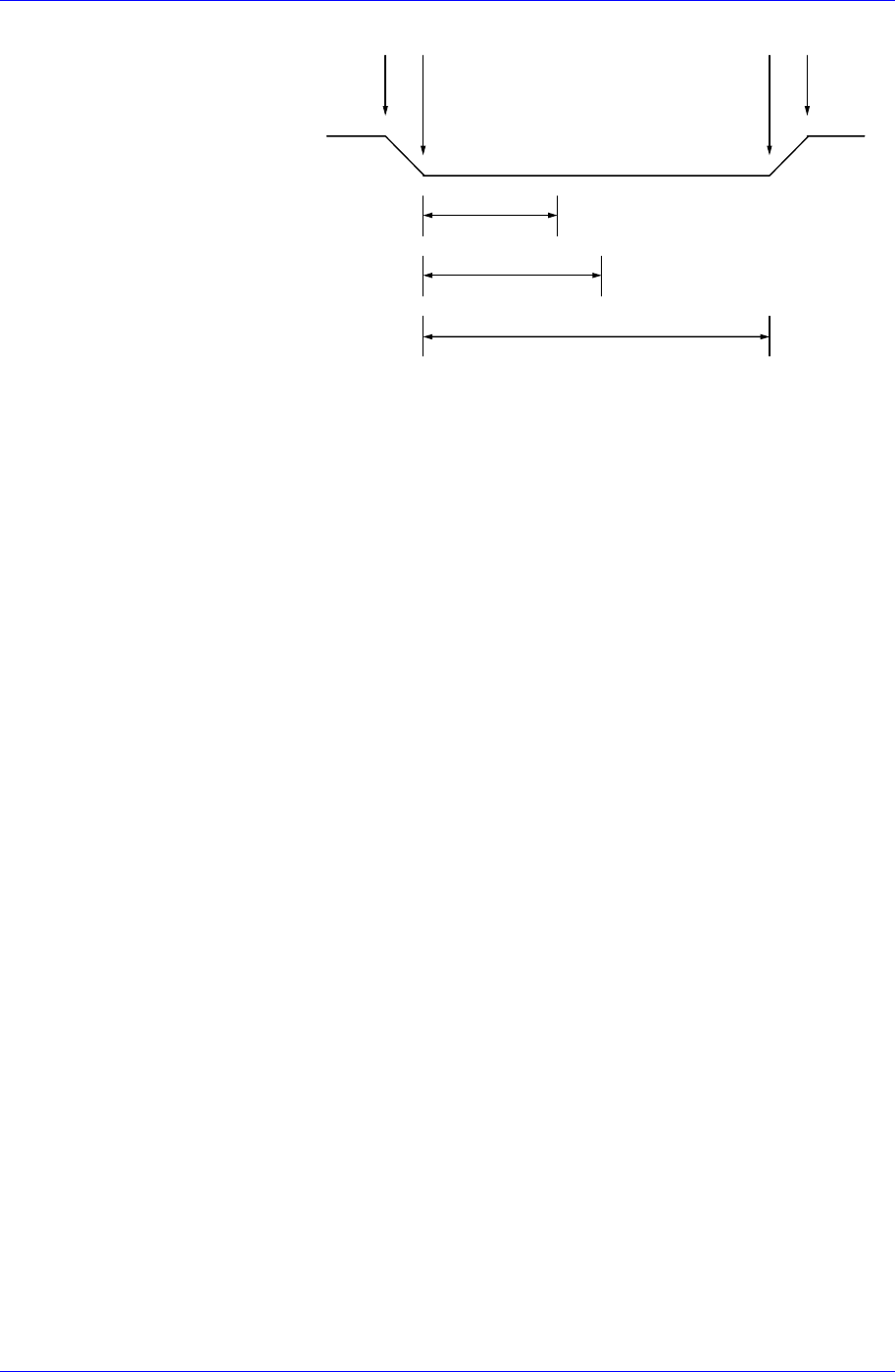
Z축의높이
VacOff
BlowOn
PlaceDelay
하강 시작점 하강 종료점 상승 시작점 상승 종료점
-6. “
贴装部品时延迟时间
”
顺序图
域
贴装(Place), 部件废弃(Dump)作业时设置驱动电动机的驱动
下所示,各驱动速度有关的速度Profile已Setting在系统
最快 。
快: 快的速度。
3-中速: 比较快的速度。
慢速: 比较慢的速度。
最慢: 最慢的速度。
<XY> 组合
选择XY 轴驱动电动机的驱动速度。
<R> 框
选择R轴驱动电动机的驱动速度。
<Z 吸料向下>
为吸附部 磁头下降时选择 Z轴驱动电动机 驱动速度。
> 组合框
后,磁头上升时选择 Z轴驱动电动机的驱动速度。
装> 组合框
部件磁头下降时选择Z轴驱动电动机的驱动速度。
后,磁头上升时选择 Z
轴驱动速度。
al Pick: 假想操作部件
<Dump Angle> 组合框
0,45,90,135,180,225,270,315
Z 轴高度
下降起始点
下降终止点
上升起始点
上升终止点
图
7
<速度> 领
吸附(Pickup),
速度。 驱动速度如
。
1- : 最快的速度
2-
4-
5-
框
组合
组合框
件 的
吸取后上升<Z
部件吸附
<Z 向下贴
为贴装
<Z 贴装后上升> 组合框
部件贴装
<Etc> 领域
<Mount Method> 组合框
1) Normal: 正常操作部件
2) Virtu