Administrator’s Guide-Chinese(SM320).pdf - 第83页
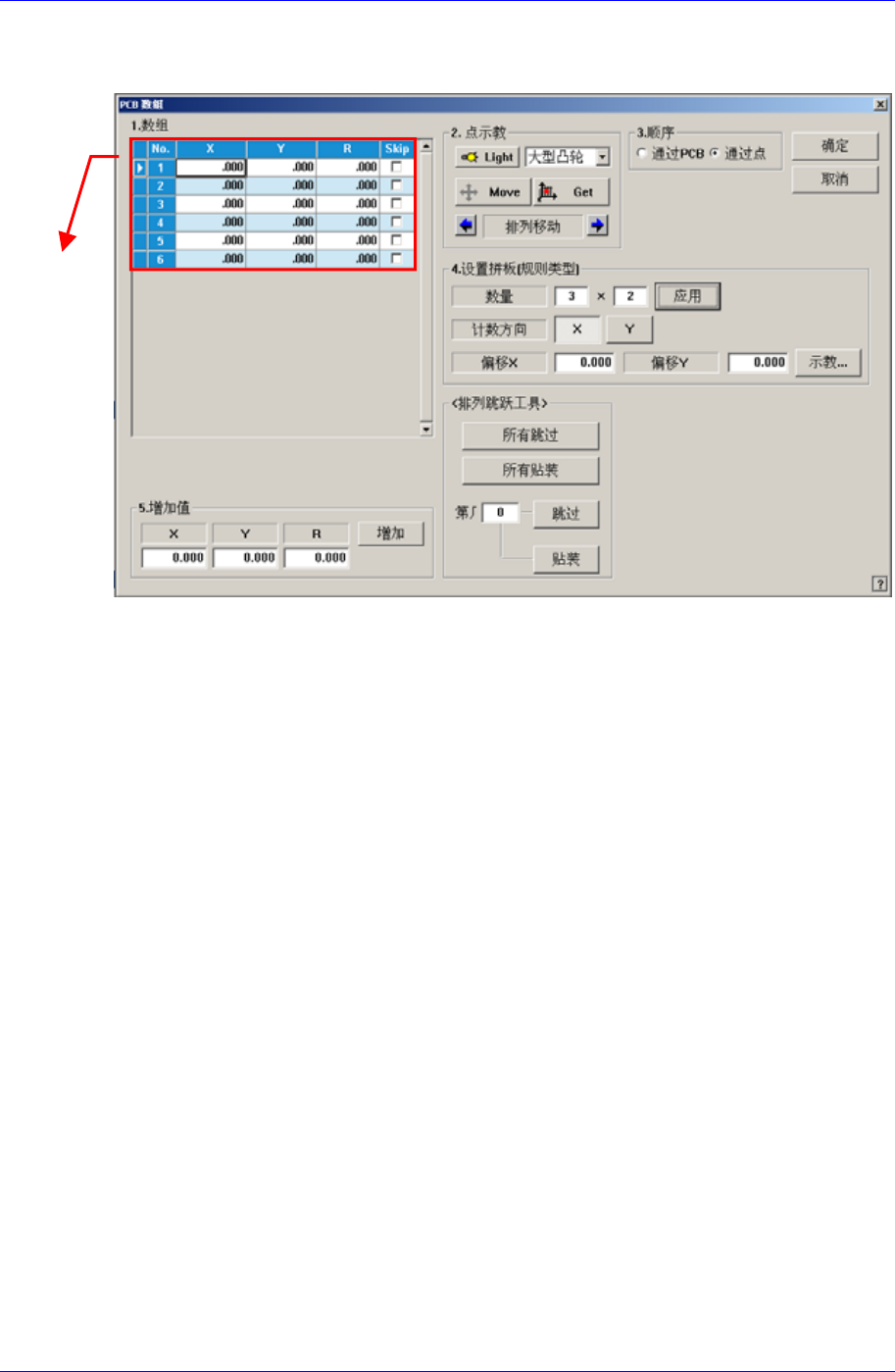
Boar d 定义 6-7 按下 < 拼 板 …> 按钮时,显示以下对话框。 Grid cell 图 6- <1. 拼板 > 领域 设定多片 PCB 的每一单片对整片 PCB 的 ” 贴装原点 ” 的偏移量。 形成跟 <4. Set Array (Regular T ype)> 领域中设定 的 Array PCB 内的小型 PCB 数同样的行。 <2. 点示教 > 领域 用于旋转 …
Samsung Component Placer SM320 Administrator’s Guide
从侧面夹 2 次。
一点也不: 只使用 clamping 方法固定 PCB
入(Load)输送带的工作区域时的 Head Assembly 等待位
滞留位置的方法。
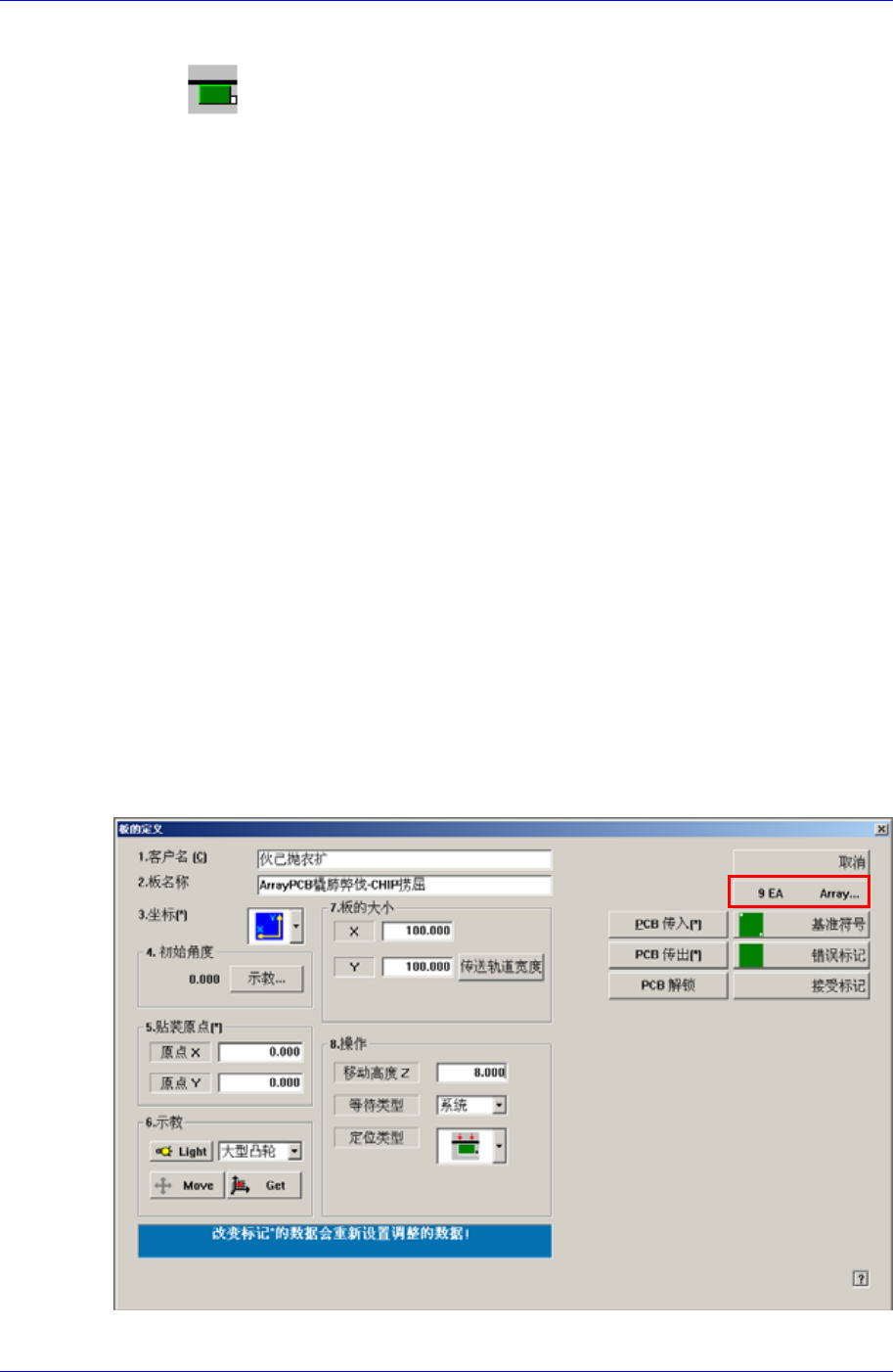
<移动高度 Z>
在 PCB 的作业过程当中,PCB 的上表面和 头的尖端 (有吸嘴时,指吸嘴
的尖端) 最小距离。
它执行把 须在<7. 操作>的”
固定类型”设定PCB的排列方式。
<PCB
解除固定 PCB
> 按钮
取消所标
6.2. Array
Array PCB时,设置各Array PCB内的小型PCB原点和 Array PCB的 Place Origin之
间的偏移
<等待类型> 组合框
选择当 PCB 基板投
置。
自动: 设备自动选定
系统: 滞留在系统指定的位置。
之间的
<PCB传入> 按钮
PCB安装在作业领域的功能。执行此功能之前,必
输出> 按钮
在作业领域的 的固定。
<取消
记的内容。
PCB 设定
值。
6-6
Board
定义
6-7
按下<拼
板…>按钮时,显示以下对话框。
Grid cell
图
6-
<1. 拼板> 领域
设定多片PCB的每一单片对整片PCB 的”贴装原点”的偏移量。 形成跟<4. Set
Array (Regular Type)> 领域中设定的Array PCB内的小型PCB数同样的行。
<2. 点示教> 领域
用于旋转XY, R轴驱动电动机把 <Device>组合框中选择的对象移动到指定的坐
标位置或用于获取当前坐标。
<装置> 组合框
用于旋转XY, R轴驱动电动机选择移动到指定坐标位置的对象或用于选择
想要获取当前坐标的对象。可选择的对象如下。
Fid Cam: 选择Fiducial Camera。
头1: 指定1号头。
头2: 指定2号头。
定3号头。
定5号头。
<移动> 按钮
动到指定的坐标位置。 运行 “移动”按钮
之前,先要用鼠标单击需要移动的位置的坐标值对应的Grid的shell(Array P
CB内的小型PCB的Origin 坐标)。
3. “PCB
拼板
”
对话框
头3: 指
头4: 指定4号头。
头5: 指
头6: 指定6号头。
光点: 指定光点。
(选项)
<Device> 组合框中选择的对象移
Samsung Component Placer SM320 Administrator’s Guide
<得到> 按钮
以<Device>组合框中选择的对象为基准获取XY, Z轴坐标。. 运行 “得到”
按钮之前,用鼠标单击需要取得的位置对应的Grid的shell(Array PCB内的
小型PCB的Origin 坐标)。
<3. 顺序> 领域
选择多片PCB的作业方式。
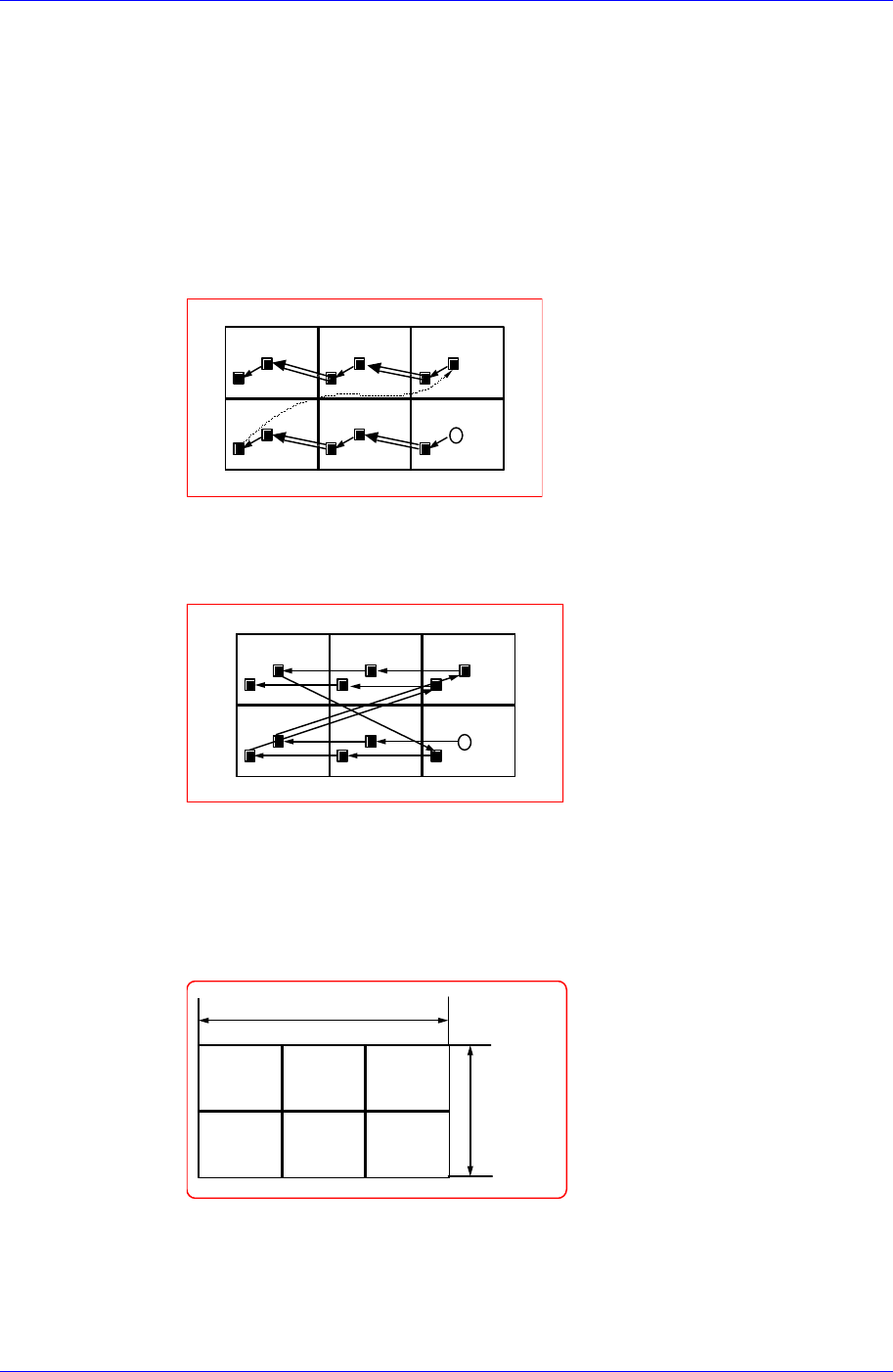
<由PCB> 选项按钮
它是完成多片PCB的一片的作业后,再进行下一片的作业的方式。
13
4
2
56
<由Point> 选项按钮
它是一个周期内完成多片PCB的所有单片的作业后,再进行下一个周期的
方式。
13
4
2
56
进行多片PCB的初始化。此功能在多片PCB为常规的排列方式时,自动设定各
单片的偏移量。
辑框领域
<4. 设置拼板(规则类型)> 领域
<数量> 编
输入多片 PCB的排列片数。
X=3
Y=2
<计数方向> 选项按钮领域
选择多片 PCB的各单片的编号方法。
6-8