Administrator’s Guide-Chinese(SM320).pdf - 第90页
Samsung Component Placer SM320 Administrator ’ s Guide A A <5. 据的清单。 点标记的名称。 ( 最多 10 字 ) Mark 点列表 > 领域 基准点标记形状数 <No> 列 基准点标记形状的序列编号。 <Name> 列 基准 <Shape> 列 选择基准点标记的形状。可选择 的形状如下。 长方形 2: 2 个四…
Board
定义
6-13
设置成利用Vision System(Fiducial Camera)检查Fiducial Mark。
<4. 教> 领域
用于旋转XY轴驱动电动机把Fiducial Camera移动到指定的坐标位置或用于获取
当前坐标。
要获取当前坐标的对象。可选择的对象如下。
Fid Cam: 选择Fiducial Camera。
头1: 指定1号头。
头2: 指定2号头。
头3: 指定3号头。
头4: 指定4号头。
头5: 指定5号头。
头6: 指定6号头。
光点: 指定光点。 (选项)
<移动> 按钮
<Device> 组合框中选择的对象移动到指定的坐标位置。
运行 “移动”之前 , 先要用鼠标单击需要移动的位置的坐标值对应的
Grid的
shell(Fiducial Mark的坐标)。
<得到> 按钮
以<Devic 中选择的对象为基准获取X, Y坐标。 运行 “得到”之前
rk的坐标)
。
示
Fiducial Camera的
<装置> 组合框
用于旋转XY轴驱动电动机选择移动到指定坐标位置的对象或者用于选择想
e>组合框
,先要用鼠标单击需要取得的位置对应的Grid的shell(Fiducial Ma
关于 基准点标记
点标记 有它形状,材料等方基准 面的必要条件。设计PCB的时候,请注意以下几
点。
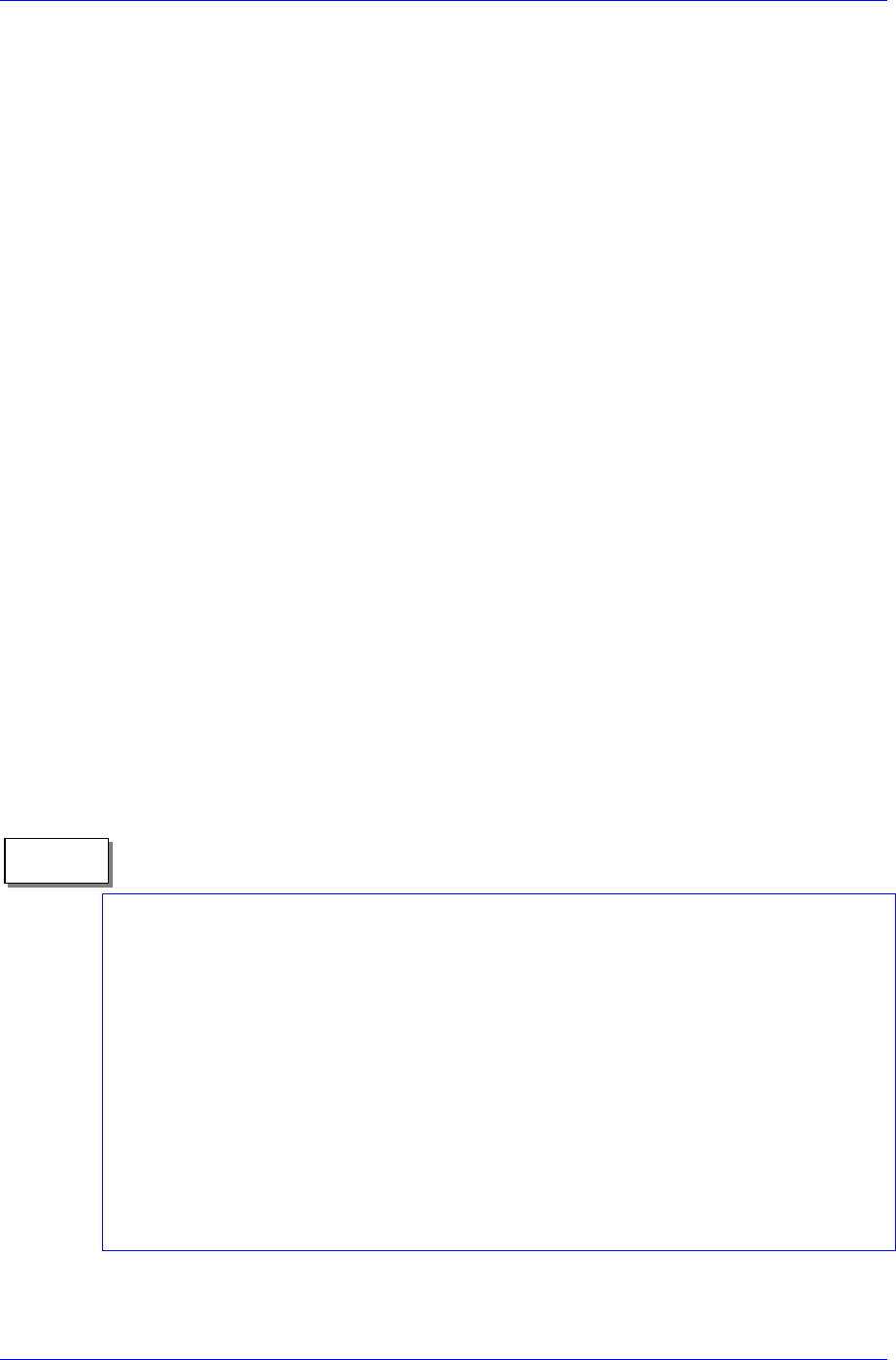
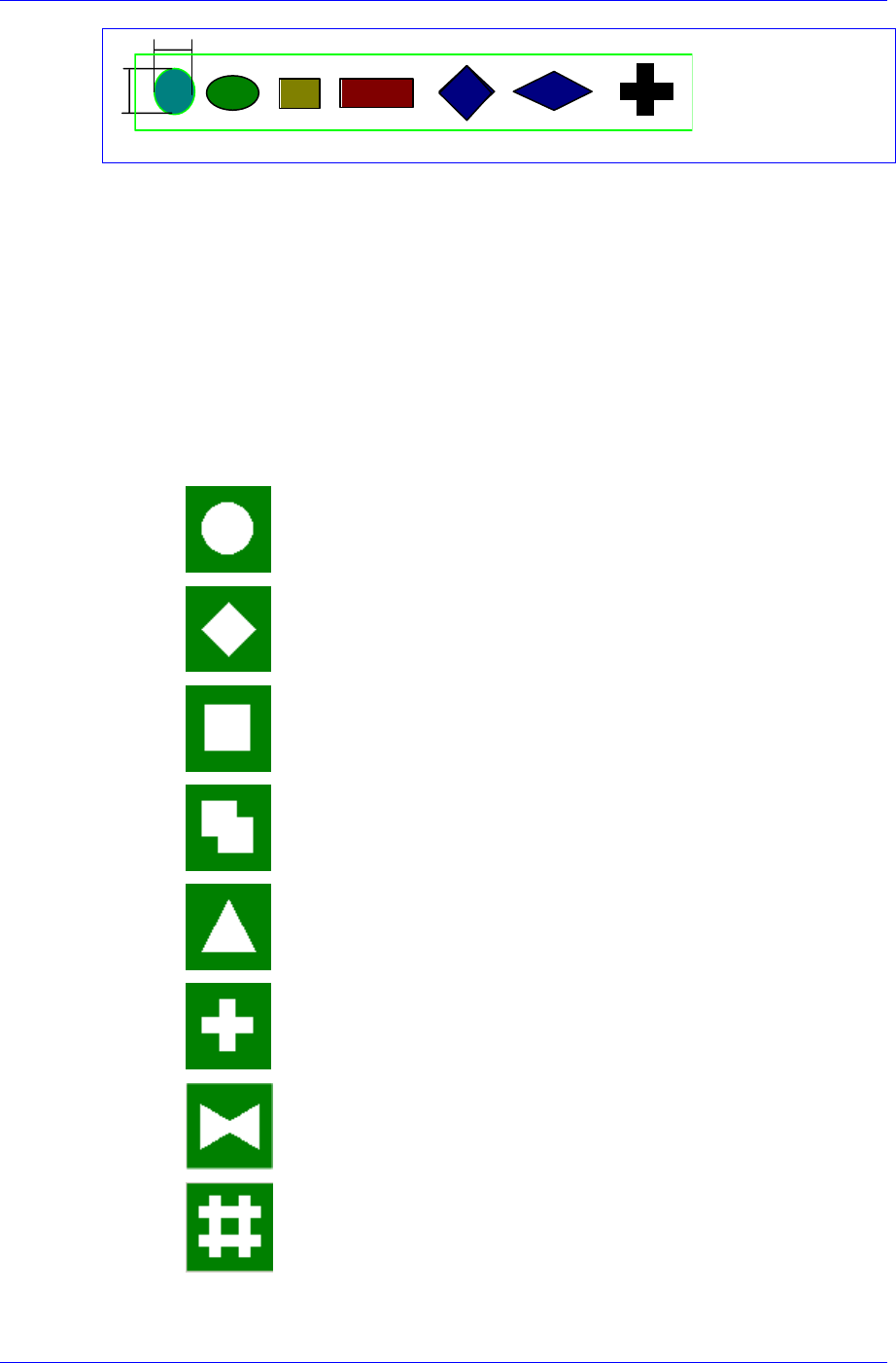
基准点标记的形状可以是以下 7种图案。 (上下对称或左右对称)
A的尺寸要2.0㎜以上。 标记传感器光点的宽度离PCB表面的距离为约 ø0.7㎜
。
从基准点标记的外缘离周围2.0㎜的范围内,不应有可能引起错误 的识别的形状
和颜色变化。(焊盘,焊膏等)
颜色有明暗差异。 基准点标记的颜色要和周围PCB 的
为了确保识别精度,基准点标记的表面上电镀铜或锡来防止表面反射。对形状
只有线条的标记,光点不能识别。
备注
Samsung Component Placer SM320 Administrator’s Guide
A
A
<5.
据的清单。
点标记的名称。(最多 10字)
Mark点列表> 领域
基准点标记形状数
<No> 列
基准点标记形状的序列编号。
<Name> 列
基准
<Shape> 列
选择基准点标记的形状。可选择的形状如下。
长方形 2: 2 个四角形的重叠形基准点标记 。
三角形: 三角形基准点标记。
“+"字光标: 十字形基准点标记。
Butterfly: 蝴蝶形Fiducial Mark。
Sharp: 井(#)形Fiducial Mark。
<Camera> 列
园: 圆形 基准点标记。
菱形: 钻石形基准点标记。
长方形: 四角形基准点标记。
6-14
Board
定义
6-15
选择检查基准
<6. 领
它是有关基准标记形状的数据。
<尺寸X> 编辑框
设定基准标记的X轴方向尺寸。(以设备的坐标系为准)
<尺寸Y> 编辑框
设定基准标记的Y轴方向尺寸。(以设备的坐标系为准)
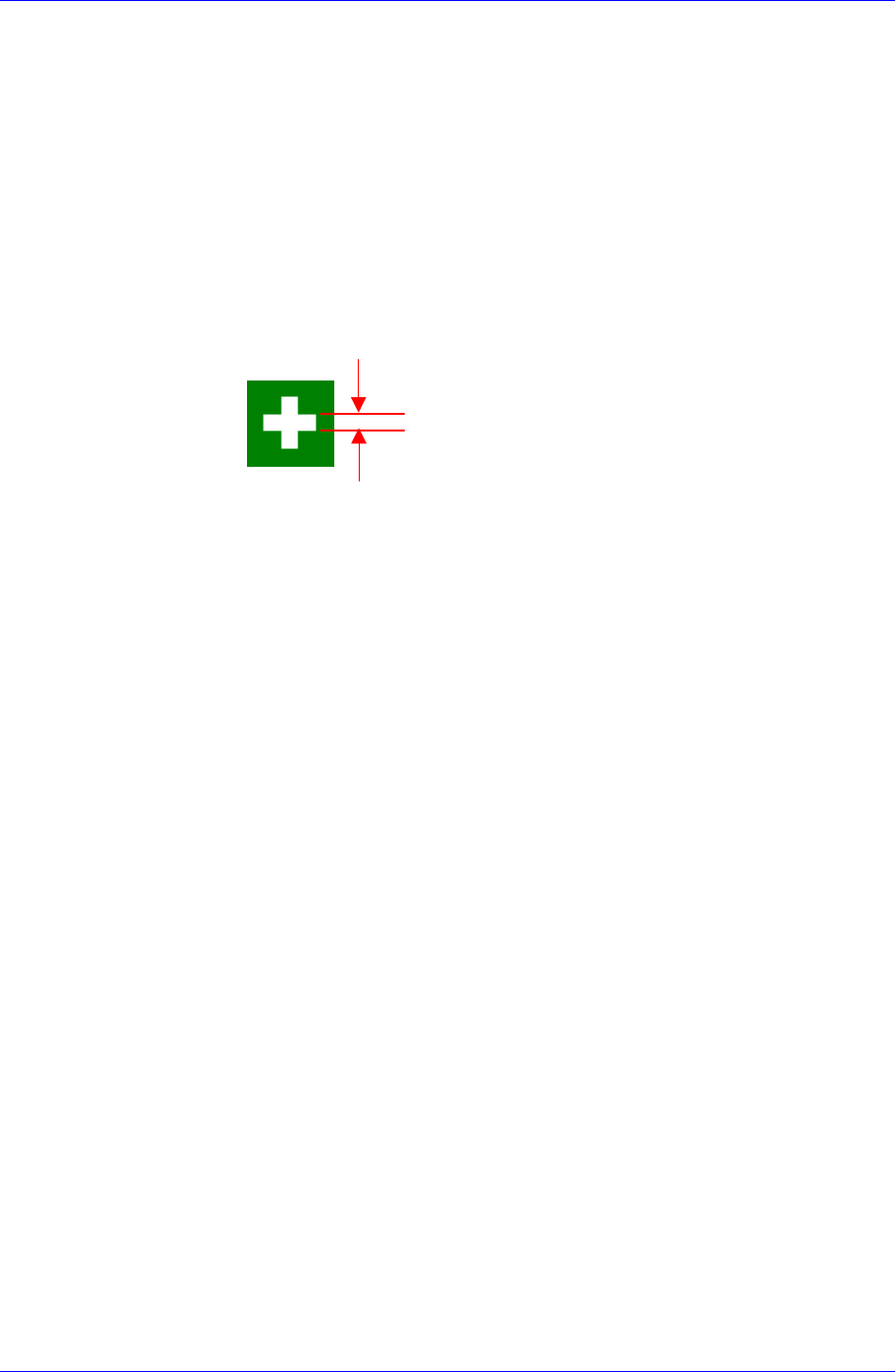
<Arm> 编辑框
设定十字形基准标记的横竖条的宽度。
点标记用摄象机。现在固定为” 移动 相机”。
域 形状数据>
<方向性 偏光性> 组合框
选择基准点标记的颜色。可选择的颜色如下。
白色: 标记比周边亮的情况。
黑色: 标记比周边暗的情况。
<厚度> 编辑框
设定基准点标记的厚度。
0时,基准点标记为饱满的情况。
0以外的数字时,此数字为外廓线的宽度。
<旋转> 组合框
选择基准点标记的旋转角度。基准点标记为三角形时,已输入
登录)的数据为边角是朝上的形状。但在实际当中,边角也有朝向侧面的
形状。这种情况时,选择旋转角度。
可选择的角度如下。
0: 标记的角度为 0 度的状态。
90: 标记旋转为 90 度角度的状态。
180: 标记旋转为 180 度角度的状态。
270: 标记旋转为 270 度角度的状态。
<7. 搜索面积> 领域
设定需检查基准标记的领域。它的主要使用目的为在一些特殊的PCB的周围有
类似标记的形状而防碍识别时,限定其检查范围。
<X> 编辑框
设定在X 轴的方向检查基准点标记的开始位置。VisFrame的中央为0,一般
设置为 Fiducial Mark的 X方向大小(Size X)
的负(-)值。
<Y> 编辑框
X