SI-F130AI_1st_CS.pdf.pdf - 第85页
操作篇 4. 自动生产 SI-F130AI 4-11 4.2 动作设定 [ 操作功能 ] 動作模式 ( ) 裝 著生產 ( ) 正常運轉 ( ) [4.2 ] …
操作篇
4. 自动生产
4-10
SI-F130AI
4.1.5 回复原点
[ 操作功能 ]
[ 操作顺序 ]
ORG ORG
ORG
若回复原点失败,
ORG
钮内灯熄灭。请参照保养篇。
注意 :
操作篇
4. 自动生产
SI-F130AI
4-11
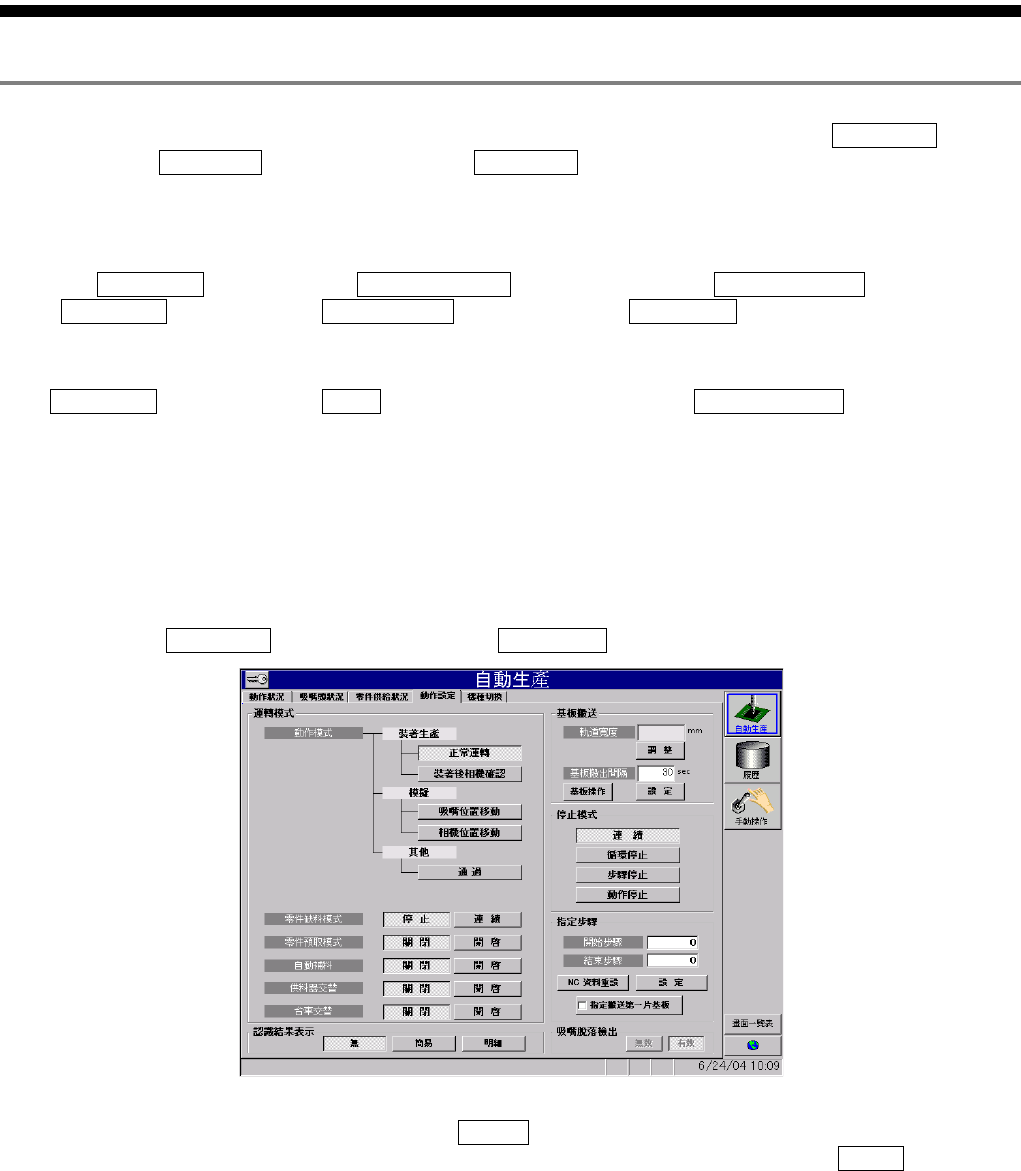
4.2 动作设定
[ 操作功能 ]
動作模式 (
) 裝著生產 ( ) 正常運轉 ( ) [4.2
] [4.3 ]
[4.2 ]
4.2.1 运转模式设定
動作模式 ( ) 零件缺料模式 ( ) 零件預取模式 (
) 自動補料 ( ) 供料器交替 ( ) 台車交替 ( )
4.2.2 基板搬送设定
軌道寬度 ( ) 的 調整 ( ) 基板搬出間隔 ( )
4.2.3 停止模式设定
4.2.4 步骤指定
[ 操作顺序 ]
自動生產 ( )
動作設定
( )
图
4.2
自動生產-動作狀況
(
自动生产-动作状况
)
画面
TAB
動作模式
( ) 零件缺料模式 ( ) TAB
NC
ON/OFF
指定搬送第 片基板
( 1 ) ON/OFF
NC (Alt+R)
4.2.5 零件认识结果详细显示
操作篇
4. 自动生产
4-12
SI-F130AI
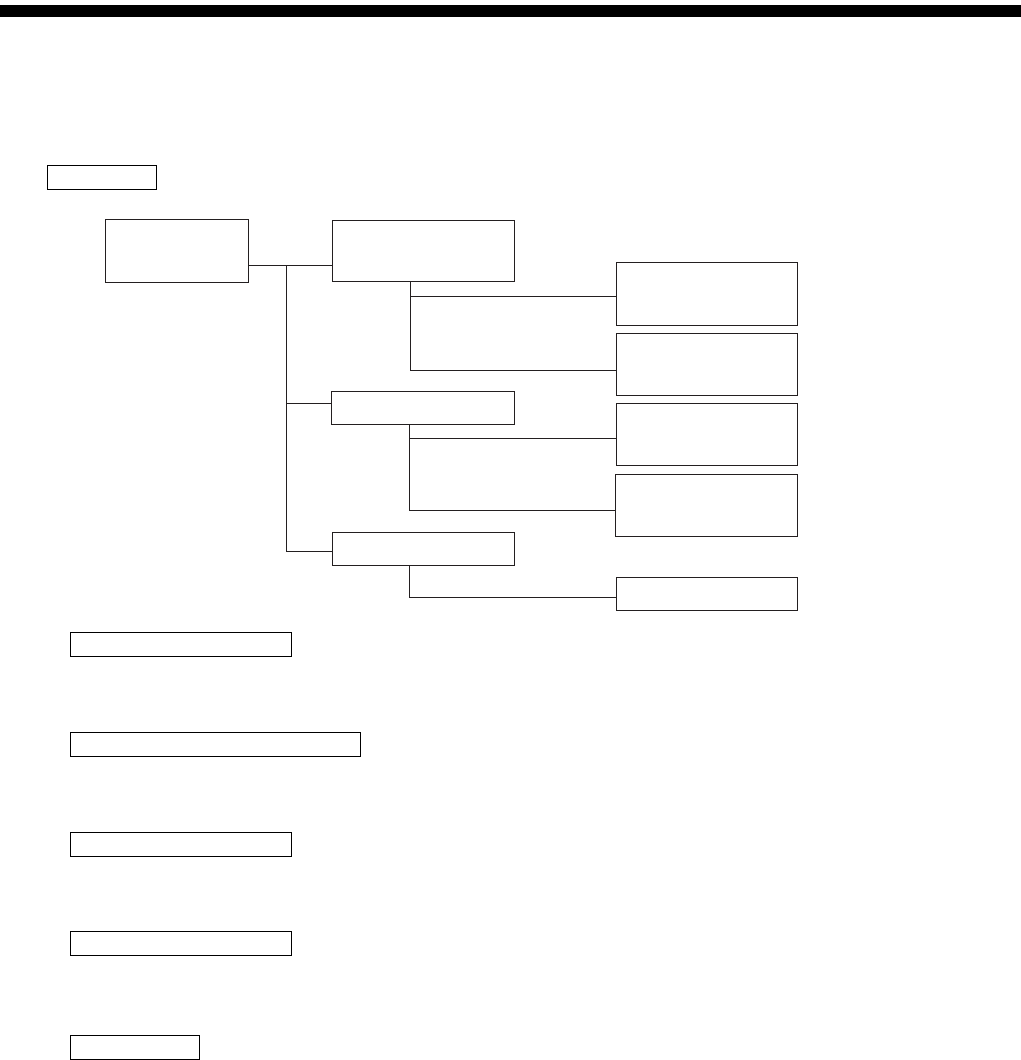
4.2.1 运转模式设定
[ ]
[ 画面说明 ]
動作模式 ( )
裝著生產‧正常運轉 ( )
裝著生產‧裝著後相機確認 ( )
模擬‧吸嘴位置移動 ( )
模擬‧相機位置移動 ( )
其他‧通過 ( )
動作模式
裝著生產
模擬
( 仿真 )
其他 ( 其它 )
正常運轉
裝著後相機確認
吸嘴位置移動
相機位置移動
通過
( 通过 )
(
动作模式 )
(
正常运转 )
(
装着后相机确认 )
(
吸嘴位置移动 )
(
相机位置移动 )
( 装着生产 )