SI-F130AI_1st_CS.pdf.pdf - 第92页
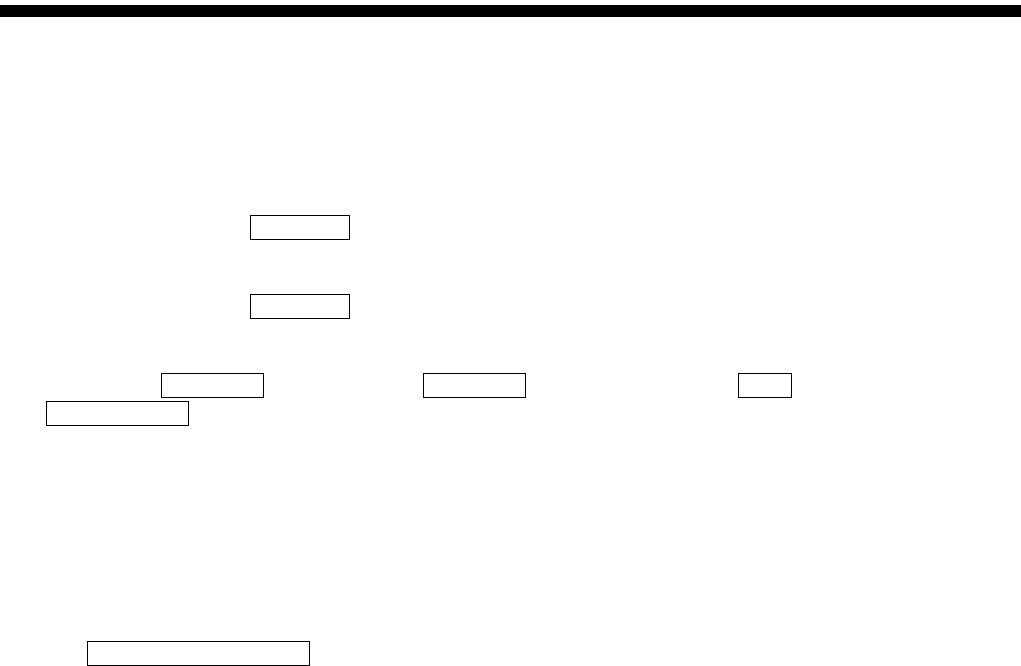
操作篇 4. 自动生产 4-18 SI-F130AI 4.2.5 零件认识结果详细显示 图 4.2.5- 1 自動生產 -動作設定 ( 自动生产-动 作设定 ) 画面 (1) 认识 结果显示模式的设定 無 ( ) 簡易 ( ) 明細 ( ) …
操作篇
4. 自动生产
SI-F130AI
4-17
4.2.4 步骤指定
(1) 开始、结束步骤的设定
[ 操作功能 ]
[ 操作顺序 ]
開始步驟 ( )
0
結束步驟 ( )
0
開始步驟 ( ) 結束步驟 ( ) 設定 ( )
NC 資料重設 (NC )
(2) 指定搬送第 1 片基板
[ 操作功能 ]
SI-F130AI
[ 操作顺序 ]
指定搬送第 片基板 ( ) , SI-F130AI
操作篇
4. 自动生产
4-18
SI-F130AI
4.2.5 零件认识结果详细显示
图
4.2.5-1
自動生產-動作設定
(
自动生产-动作设定
)
画面
(1) 认识结果显示模式的设定
無 ( ) 簡易 ( ) 明細 ( )
[ ]
3
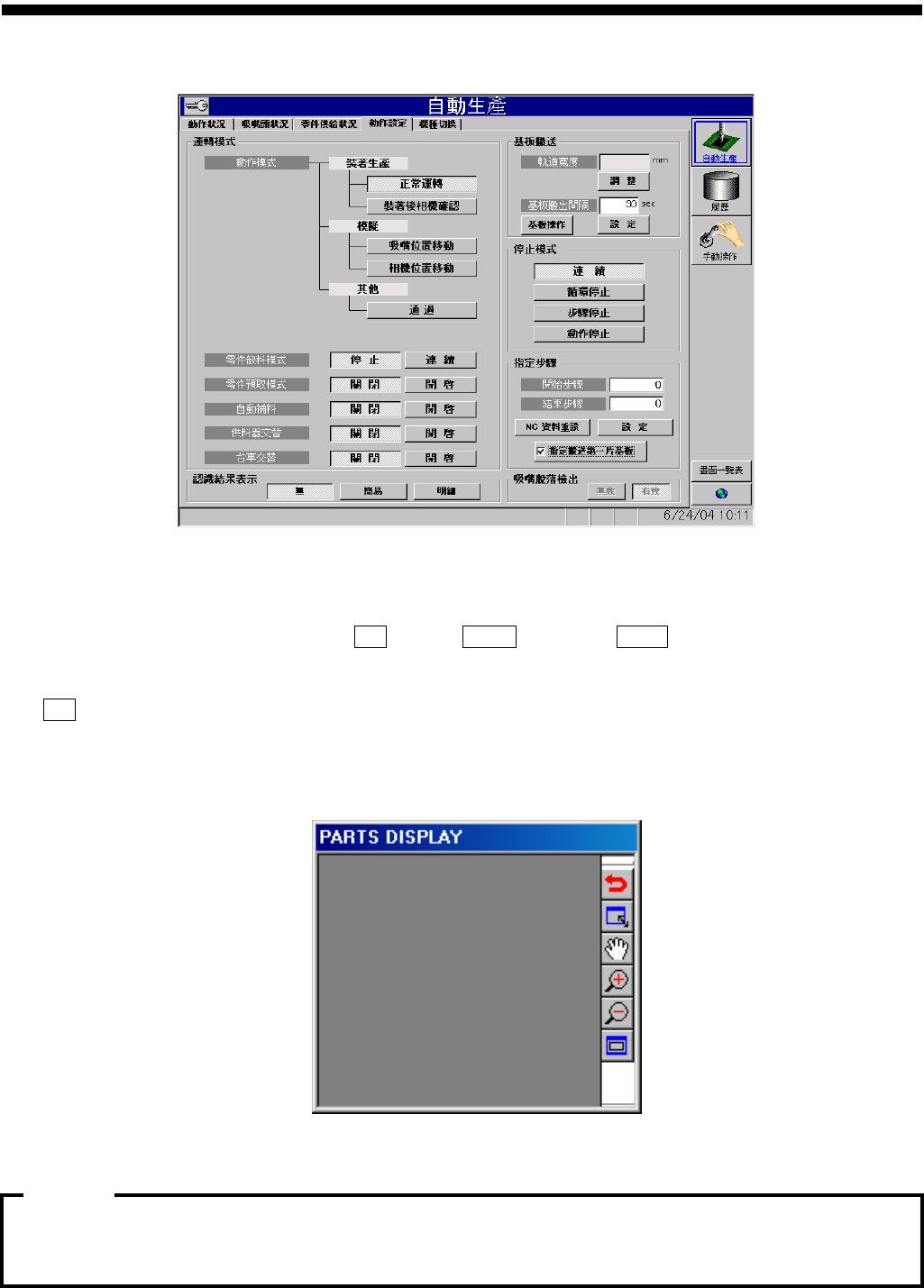
無 ( )
图
4.2.5-2
芯片认识时的零件相机窗口表示
设定零件资料中装着动作资料的认识重试次数和补料次数,及动作设定-动作模式-自动补料
设定为开启时,执行指定的认识重试次数、补料动作,仅有在最终认识失败时,在相机窗口中
显示零件认识结果和零件形状。
注意 :
操作篇
4. 自动生产
SI-F130AI
4-19
簡易 ( )
图
4.2.5-3
芯片认识时的零件相机窗口表示
为在零件中心显示表示零件角度的十字,必须从零件认识结果得出零件位置和零件中心。因
此,认识失败时不显示。
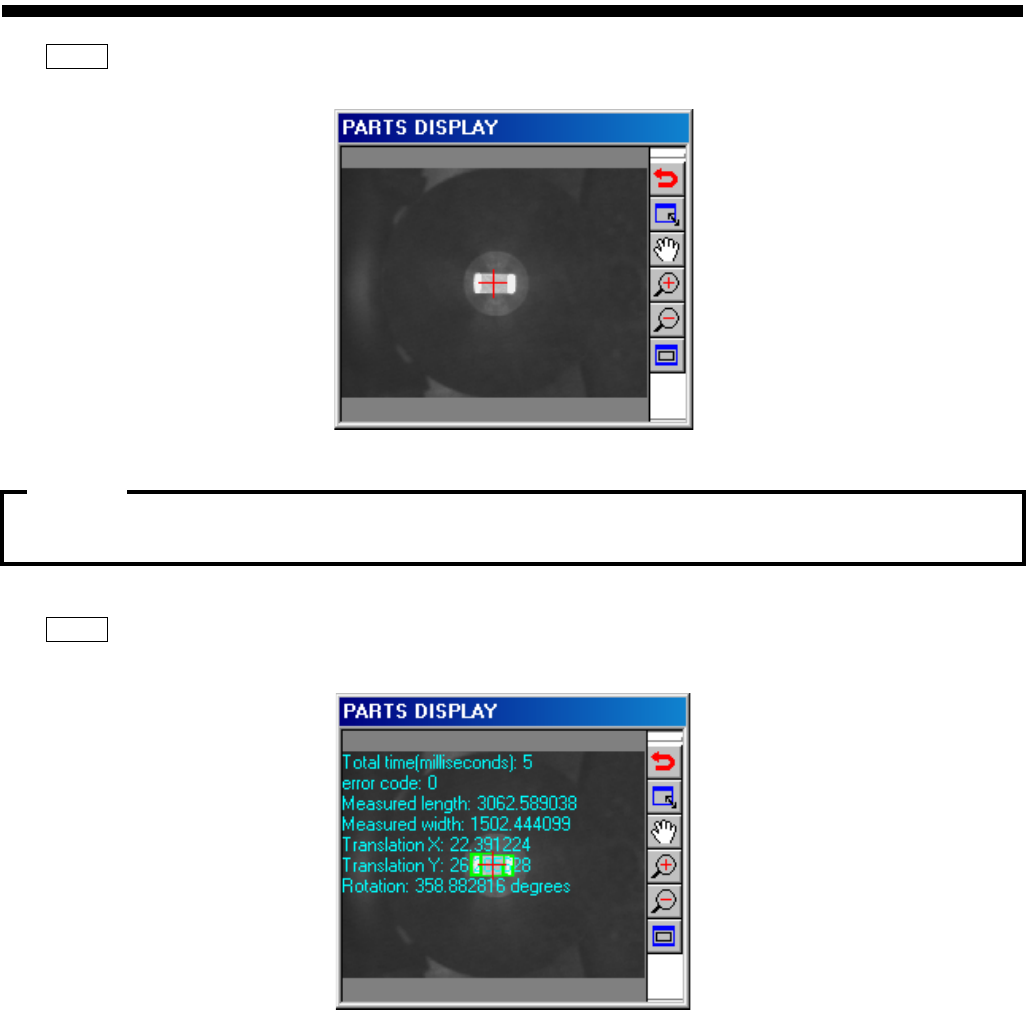
明細 ( )
图
4.2.5-4
芯片认识时的零件相机窗口表示
(
认识成功时
)
注意 :