SM421 Maintenance Reference(Chi Ver1).pdf - 第131页
控制单元检验 7-21 (Input) 输入 PIN NO. DEF. DESCRIPTION 备注 1 CANH 2 CANL CAN 通信信号 NODE 的 CAN 通信 号 连接其它 信 CN2 3 /IO-RES RESET 信号 FROM CAN MASTER 1 24VP OUTPUT PORT 用 DC+24V 电源 2 24V 源 INPUT PORT 用 DC+24V 电 CN1 24G GR 3/4 DC+24V…
Samsung Component Placer SM421 Maintenance Reference
PIN NO. DEF. DESCRIPTION
备注
4 .5 PO OUT4 RESERVED OUTPUT RT
6 B
OU 7 R
PIN CONNECT
板 诊断
ON ESCRIPTION
RE T
电源
电源
3 OUT4. UZZER OUT
CN13
4 T4. ESERVED OUTPUT PORT
6 OR
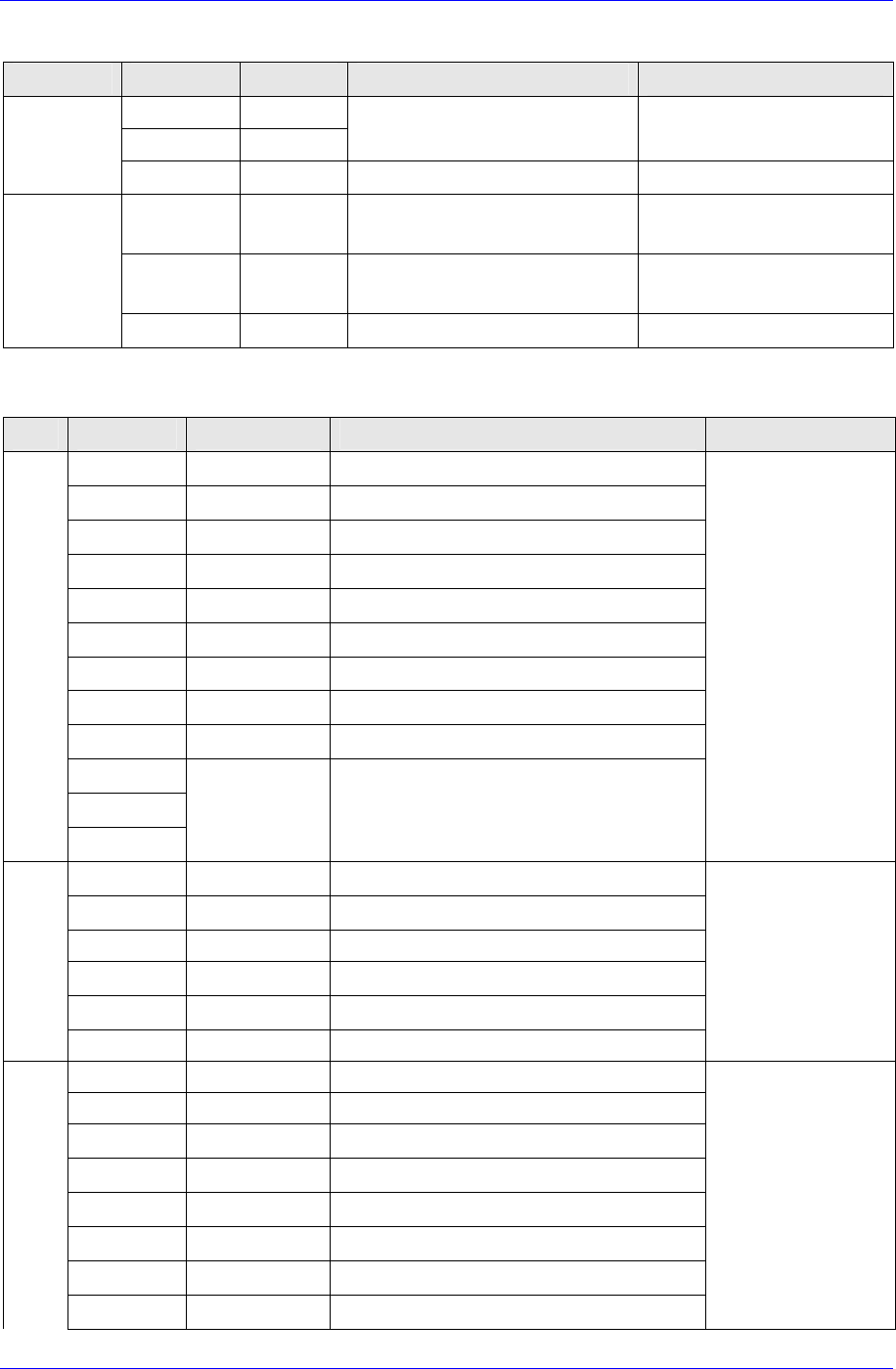
基 状态 LED信息
LED ON DESCRIPTI Remark LED ON D Remark
LED1
Can 发信
LED5 IO SE
LED2
出现Error
LED6
基板输出
LED3
Can 收信
LED7
基板动作
LED4
CPU 动作
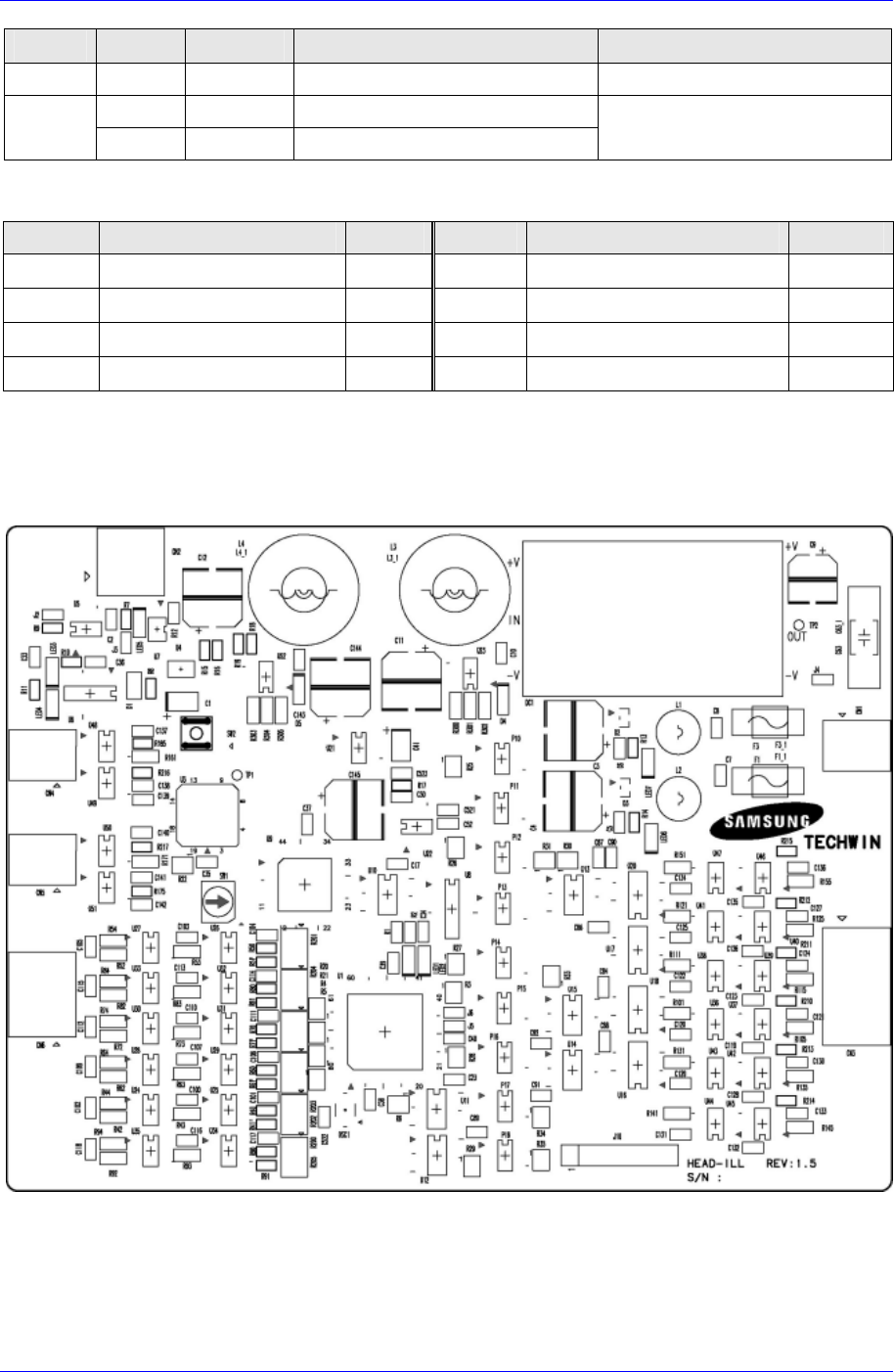
7.3.6. Head ation
从CAN Master 命令,调节使用于Fly Cam 及Outer照明的亮度
。
Illumin Board
Board接受 ing era的Side
使用的电
外部输入 V DC
内部使用 DC / +24V DC
主要功能
源
电源: +24
的电源: +5V
说明
7-20
控制单元检验
7-21
(Input) 输入
PIN NO. DEF. DESCRIPTION
备注
1 CANH
2 CANL
CAN 通信信号
NODE的CAN通信
号
连接其它
信
CN2
3 /IO-RES
RESET 信号
FROM CAN MASTER
1 24VP
OUTPUT PORT用 DC+24V
电源
2 24V
源
INPUT PORT用 DC+24V 电
CN1
24G
GR
3/4
DC+24V 电源 OUND
(O
输出 utput)
PIN NO. DEF. DESCRIPTION 비고
1 OUTER
#6 OUTER 电源
_6P
HEAD
2 OUTER
#6 OUTER 电源
_6M
HEAD
3 OUTER_5P
电源
HEAD#5 OUTER
4 OUTER_5M
HEAD#5 OUTER 电源
5 OUTER_4P
HEAD#4 OUTER 电源
6 OUTER_4M
HEAD#4 OUTER 源电
7 OUTER_3P
HEAD#3 OUTER 电源
8 OUTER_3M
HEAD#3 OUTER 电源
9 OUTER_2P
HEAD#2 OUTER 电源
10 OUTER_2M
HEAD#2 OUTER 电源
11
R 电源
OUTER_1P
HEAD#1 OUTE
CN3
1 OUT
H OU 源
2 ER_1M
EAD#1 TER 电
12PIN
CONNECTOR
1 FIDU_OUT_P
UTER 电源
FIDUCIAL O
2 FIDU_OUT_M
UTER 电源
FIDUCIAL O
CN
N /C
IN
N
4
3 / 4
4P
CO NECTOR
1 FIDU
L INN 源
_IN_P
FIDUCIA ER 电
2 FIDU
L INN 源
_IN_P
FIDUCIA ER 电
C
N / C
IN
N TOR
N5
3 / 4
4P
CO NEC
1 GND OUND GR
2 GND ND GROU
3 SIDE
1 SIDE
_1
HEAD# 电源
4 SIDE
2 SIDE
_2
HEAD# 电源
5 SIDE
SIDE
_3
HEAD#3 电源
6 SIDE
SIDE
_4
HEAD#4 电源
7 SIDE
AD#5 SIDE
_5
HE 电源
C
IN
N
N6
8 SIDE_6
HEAD#6 SIDE 电源
8P
CO NECTOR
Samsung Component Placer SM421 Maintenance Reference
态诊断LED信 基板状 息
DESCRIPTION Remark LED ON ON Remark
LED4
信
T
Can 发
LED5 IO RESE
LED1
rro
电源 出现E r
LED6
基板输出
LED3
信
源 Can收
LED7
基板动作电
LED2
CPU 动作
LED ON DESCRIPTI
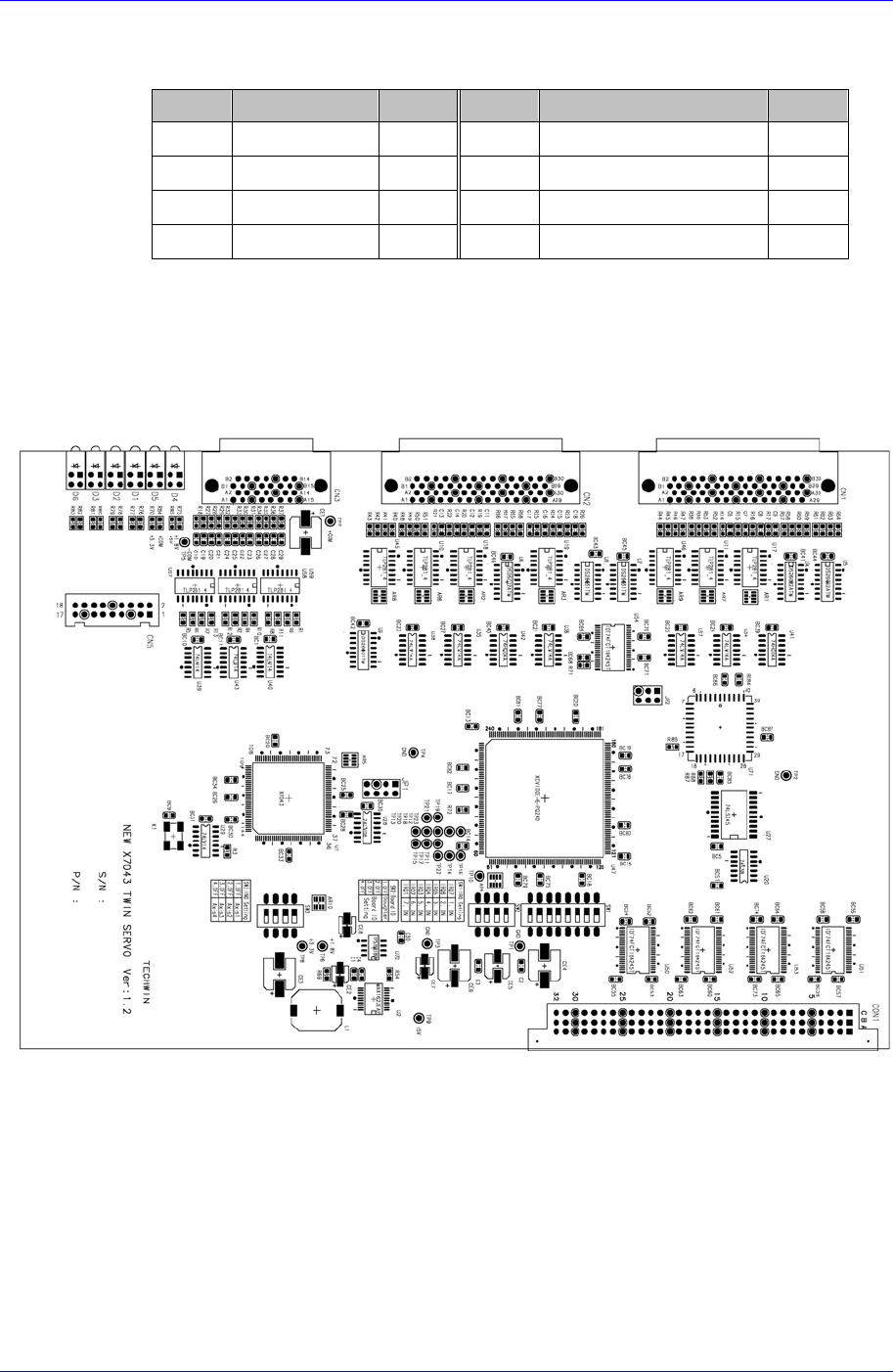
.3.7. X7043 TWIN SERVO Board
本设 win Servo System。 因此,必须由 Y1轴
和Y2 驱动 本X704 SERVO Y2轴驱
动时检查 和 的监视装
7
备的Y轴驱动部是由Y1和Y2构成的T
轴的同步 带动Y轴运转。 3 TWIN Board是Y1轴和
Y1 Y2同步运转是否正常 置。
使用的电
外部输入 其他电源。
内部使用 DC, +3.3VDC, + C
源
电源: 无须输入
的电源: +1.8V 5VD , +24VDC
7-22