20201214132147.pdf - 第12页
M O TO MA N Spe cifications ■ 外形尺寸及动作范围 单位: mm : P 点动作范围 GP400 GP600 Ø250 Ø160H7 Ø315h8 R 2942 P 点 900 1050 250 300 1605 400 609 680 15 ° R 1371 275 220 0 2942 796 0 215 2683 B T S U L A 视角 A 260 R 8 12×M12×P1.75 ( 深 25 …
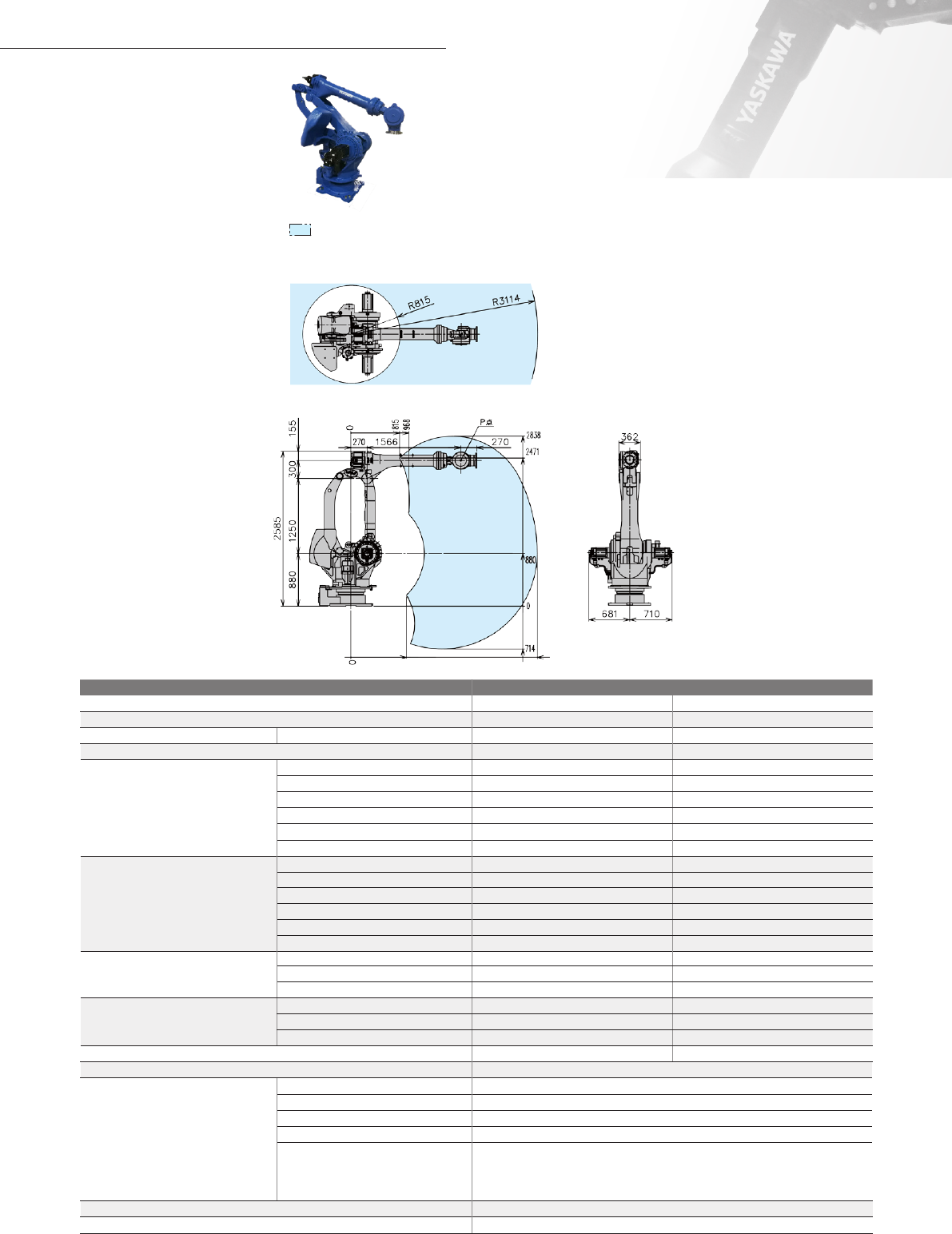
M O TOMAN Specifications
■
外形尺寸及动作范围 单位:mm
:
P点动作范围
GP280L
3114
928
规格
GP280L
型号
YR-1-06VR280-A00
自由度 垂直多关节型(
6
自由度)
负载
手腕
280 kg
重复定位精度
*
1
0.1 mm
动作范围
S
轴(旋转) -
180°
~
+180°
L
轴(下腕) -
45°
~
+ 90°
U
轴(上腕)
*
2
-
120°
~
+15.5°
R
轴(手腕旋转) -
360°
~
+360°
B
轴(手腕摆动) -
125°
~
+125°
T
轴(手腕回转) -
360°
~
+360°
最大速度
S
轴(旋转)
1.92 rad/s, 110°/s
L
轴(下腕)
1.57 rad/s, 90°/s
U
轴(上腕)
1.57 rad/s, 90°/s
R
轴(手腕旋转)
2.18 rad/s, 125°/s
B
轴(手腕摆动)
2.18 rad/s, 125°/s
T
轴(手腕回转)
3.58 rad/s, 205°/s
容许力矩
R
轴(手腕旋转)
1960 N
・
m
B
轴(手腕摆动)
1960 N
・
m
T
轴(手腕回转)
950 N
・
m
容许惯性力矩
(
GD
2
/4
)
R
轴(手腕旋转)
220 kg
・
m
2
B
轴(手腕摆动)
220 kg
・
m
2
T
轴(手腕回转)
140 kg
・
m
2
本体质量
2380 kg
IEC
保护等级 本体
: IP54,
手腕
: IP67
设置环境
温度
0 ˚C ~ +45 ˚C
湿度
20% ~ 80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
海拔
1000 m
以下
其他
无易燃性、腐蚀性气体、液体
无水、油、粉尘等
远离电气噪音源
无强磁场
电源容量
*
3
7.5 kVA
设置方式 置架式
*
1: ISO 9283
为基准
.
*
2:
记载的是自轴的动作范围而不是对地基准。(水平多关节机型除外)
*
3:
因用途、动作模式而异。
(注)本表记载的是
SI
单位系。
10
M O TOMAN Specifications
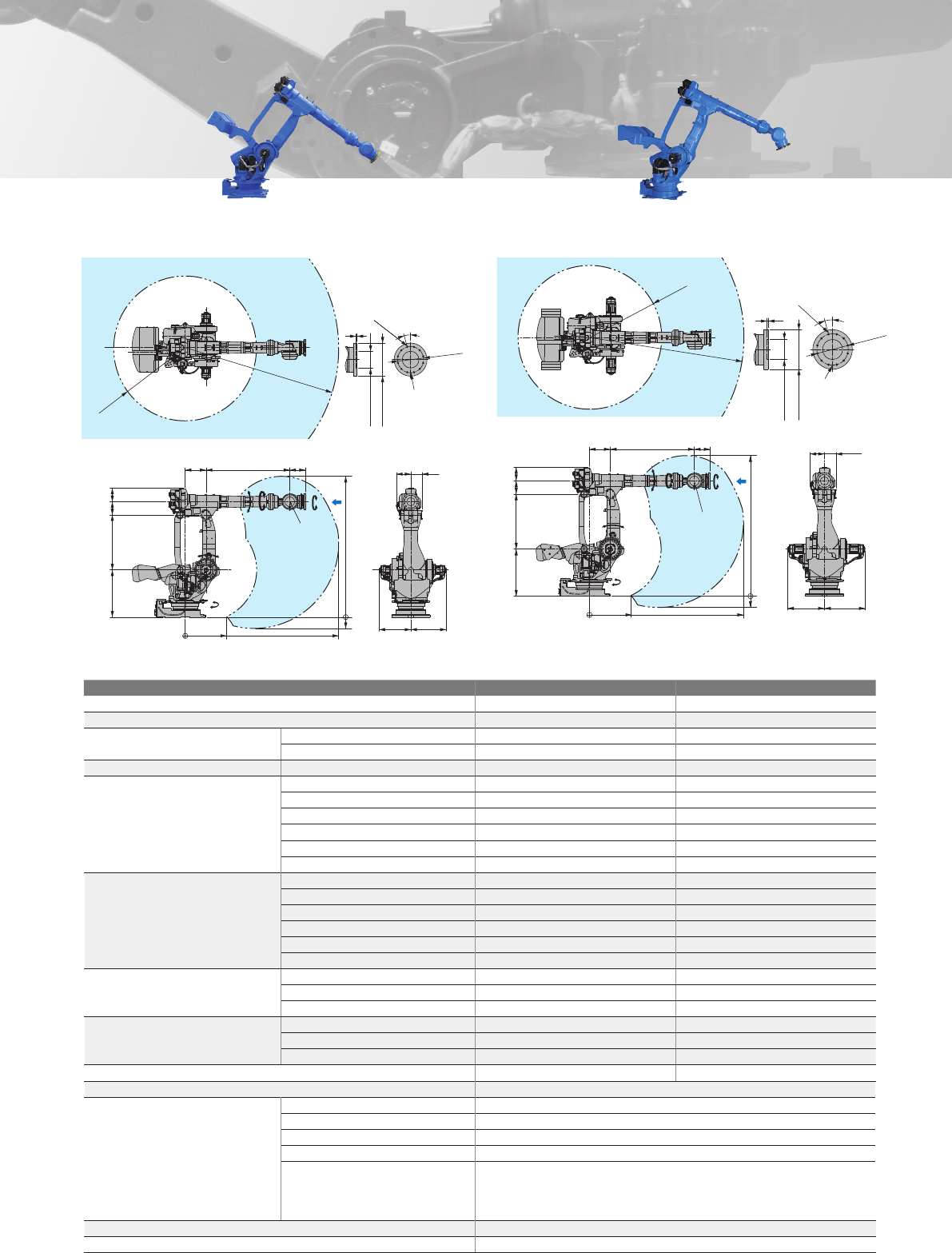
■
外形尺寸及动作范围 单位:mm
:
P点动作范围
GP400 GP600
Ø250
Ø160H7
Ø315h8
R
2942
P点
900 1050 250
300
1605400
609 680
15
°
R
1371
275
220
0
2942
796
0
215
2683
B
T
S
U
L
A
视角 A
260
R
8
12×M12×P1.75
( 深
25
)
Ø12H7
( 深
15)
Ø250
0
2942
796
0
215
2683
P点
900 1050 250
300
1605
400
706 777
15
°
8
R
2942
R
1371
275
220
视角 A
R
B
T
S
U
L
A
260
Ø160H7
Ø315h8
Ø12H7
( 深
15)
12×M12×P1.75
( 深
25
)
规格
GP400 GP600
型号
YR-1-06VX400-A00 YR-1-06VX600-A00
自由度 垂直多关节型(
6
自由度) 垂直多关节型(
6
自由度)
负载
手腕
400 kg 600 kg
U
轴
50 kg 50 kg
重复定位精度
*
1
0.1 mm 0.1 mm
动作范围
S
轴(旋转) -
180°
~
+180°
-
180°
~
+180°
L
轴(下腕) -
55°
~
+ 61°
-
55°
~
+ 61°
U
轴(上腕)
*
2
-
113°
~
+ 18°
-
113°
~
+ 18°
R
轴(手腕旋转) -
360°
~
+360°
-
360°
~
+360°
B
轴(手腕摆动) -
115°
~
+115°
-
115°
~
+115°
T
轴(手腕回转) -
360°
~
+360°
-
360°
~
+360°
最大速度
S
轴(旋转)
1.78 rad/s, 102°/s 1.43 rad/s, 82°/s
L
轴(下腕)
1.69 rad/s, 97°/s 1.43 rad/s, 82°/s
U
轴(上腕)
1.69 rad/s, 97°/s 1.43 rad/s, 82°/s
R
轴(手腕旋转)
1.40 rad/s, 80°/s 1.40 rad/s, 80°/s
B
轴(手腕摆动)
1.40 rad/s, 80°/s 1.40 rad/s, 80°/s
T
轴(手腕回转)
3.00 rad/s, 172°/s 2.83 rad/s, 162°/s
容许力矩
R
轴(手腕旋转)
2989 N
・
m 3430 N
・
m
B
轴(手腕摆动)
2989 N
・
m 3430 N
・
m
T
轴(手腕回转)
1343 N
・
m 1764 N
・
m
容许惯性力矩
(
GD
2
/4
)
R
轴(手腕旋转)
500 kg
・
m
2
520 kg
・
m
2
B
轴(手腕摆动)
500 kg
・
m
2
520 kg
・
m
2
T
轴(手腕回转)
315 kg
・
m
2
350 kg
・
m
2
本体质量
2840 kg 3035 kg
IEC
保护等级 本体
: IP30,
手腕
: IP67
设置环境
温度
0 ˚C ~ +45 ˚C
湿度
20% ~ 80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
海拔
1000 m
以下
其他
无易燃性、腐蚀性气体、液体
无水、油、粉尘等
远离电气噪音源
无强磁场
电源容量
*
3
7.0 kVA
设置方式 置地式
*
1: ISO 9283
为基准
.
*
2:
记载的是自轴的动作范围而不是对地基准。(水平多关节机型除外)
*
3:
因用途、动作模式而异。
(注)本表记载的是
SI
单位系。
11
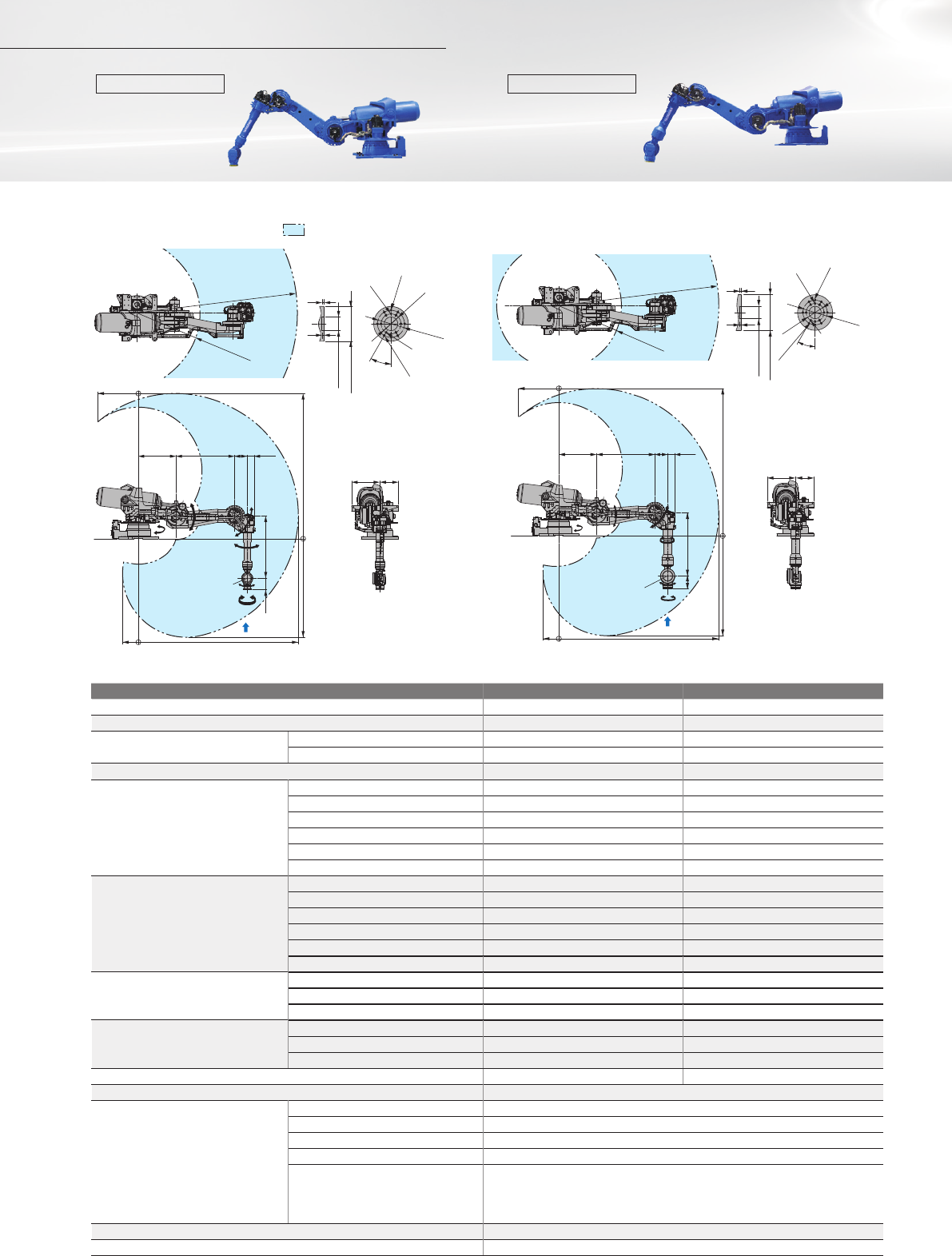
M O T O M A N Specifications
■
外形尺寸及动作范围 单位:mm
:
P点动作范围
GP165R GP200R
置架式机型 置架式机型
Ø92
Ø125
Ø63H7
Ø160h6
视角 A
R
1212
R
3140
555 365
L
S
R
U
T
30
°
2850
310
0 0
3140
1932
P点
0
795
740 1150
250 153
1225
225
8
B
8
A
2×Ø10H7
( 深
8)
2×Ø9H7
( 深
8)
6×M10×P1.5
( 深
12
)
6×M10×P1.5
( 深
12
)
Ø92
Ø125
8
30
°
R
1232
R
3140
555 365
视角 A
8
2850
310
0
3140
1932
P点
0
795
0
740
1150
250 153
1225
250
R
B
T
S
U
L
A
2×Ø10H7
( 深
8)
2×Ø9H7
( 深
8)
Ø63H7
Ø180h6
6×M10×P1.5
( 深
12
)
6×M10×P1.5
( 深
12
)
规格
GP165R GP200R
型号
YR-1-06VR165-A00 YR-1-06VR200-A00
自由度 垂直多关节型(
6
自由度) 垂直多关节型(
6
自由度)
负载
手腕
165 kg 200 kg
U
轴
30 kg 30 kg
重复定位精度
*
1
0.05 mm 0.05 mm
动作范围
S
轴(旋转) -
180°
~
+180°
-
180°
~
+180°
L
轴(下腕) -
130°
~
+ 80°
-
130°
~
+ 80°
U
轴(上腕)
*
2
-
79.4°
~
+ 78°
-
78.4°
~
+ 78°
R
轴(手腕旋转) -
360°
~
+360°
-
360°
~
+360°
B
轴(手腕摆动) -
130°
~
+130°
-
125°
~
+125°
T
轴(手腕回转) -
360°
~
+360°
-
360°
~
+360°
最大速度
S
轴(旋转)
1.83 rad/s, 105°/s 1.57 rad/s, 90°/s
L
轴(下腕)
1.83 rad/s, 105°/s 1.48 rad/s, 85°/s
U
轴(上腕)
1.83 rad/s, 105°/s 1.48 rad/s, 85°/s
R
轴(手腕旋转)
3.05 rad/s, 175°/s 2.09 rad/s, 120°/s
B
轴(手腕摆动)
2.62 rad/s, 150°/s 2.09 rad/s, 120°/s
T
轴(手腕回转)
4.19 rad/s, 240°/s 3.32 rad/s, 190°/s
容许力矩
R
轴(手腕旋转)
921 N
・
m 1344 N
・
m
B
轴(手腕摆动)
921 N
・
m 1344 N
・
m
T
轴(手腕回转)
490 N
・
m 715 N
・
m
容许惯性力矩
(
GD
2
/4
)
R
轴(手腕旋转)
85 kg
・
m
2
143 kg
・
m
2
B
轴(手腕摆动)
85 kg
・
m
2
143 kg
・
m
2
T
轴(手腕回转)
45 kg
・
m
2
80 kg
・
m
2
本体质量
1760 kg 1830 kg
IEC
保护等级 本体
: IP54,
手腕
: IP67
设置环境
温度
0 ˚C ~ +45 ˚C
湿度
20% ~ 80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
海拔
1000 m
以下
其他
无易燃性、腐蚀性气体、液体
无水、油、粉尘等
远离电气噪音源
无强磁场
电源容量
*
3
5.0 kVA
设置方式 置架式
*
1: ISO 9283
为基准
.
*
2:
记载的是自轴的动作范围而不是对地基准。(水平多关节机型除外)
*
3:
因用途、动作模式而异。
(注)本表记载的是
SI
单位系。
12