JUKI_2050说明书_.pdf - 第30页
第 1 章 设 备概要 RevO3 1-4-6 X,Y,L& 触 的说明 本 设备进 行数 值控制 的釉 有以 下好 (X、 Y、 Z、 9). (1) L Y 轴 装置 的左右 方向为 X, 前后方 向为 Y, 以 0.01nra 为 单位, 显 示为工 =0。。. 。。m, Y=OO O. OOm. 坐 标系分 为生产 程序用 坐标与 示教用 坐标. 两坐 标事将 被自动 变更, 因此 才需 刻 意分开 使用. Z 轴 显示…
第
1
章
设
备概要
RevO3
1*5
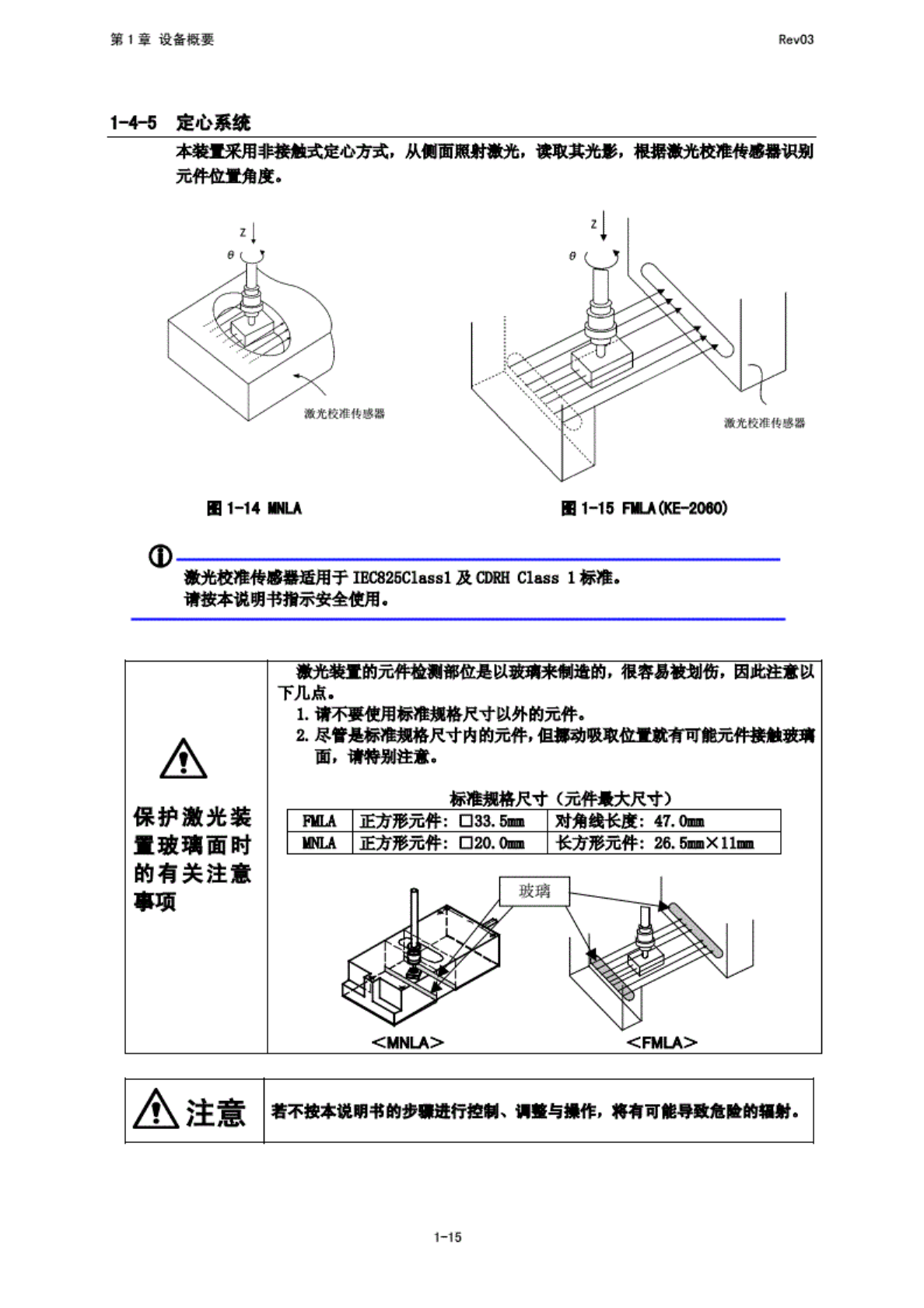
定
心系统
本装
・采用
三
随漱
式定心
方式,
从面
面照射
激光,
携取其
光能,
根据
激光
校准传
感器飒
元件
tfc
置
角度.
S
1-14
IMLA
激光
校准传
JS
磐适
用于由
如
Classi
及
CDRH
Class
1
标准,
请
按本悦
青书指
示安全
使用,
A
保护
激光装
・玻
璃面时
的有
关注意
激光
装置的
元件检
费部位
是以期
1
来制
造的,
很
容易被
划伤,
因此
注意以
下
几点.
L
请不要
使用榇
脚格
尺寸以
外的元
件。
2.
尽管
是标演
格尺
寸内的
元件,
但排动
吸取
It
・就有
可婚
的接
触制
面,
请特别
注意.
於注意
若不按
本说明
书的罗
映涯行
控制、
辑
我与操
作,
将有可
能导致
急*
的
H
时.
1-15
第
1
章
设
备概要
RevO3
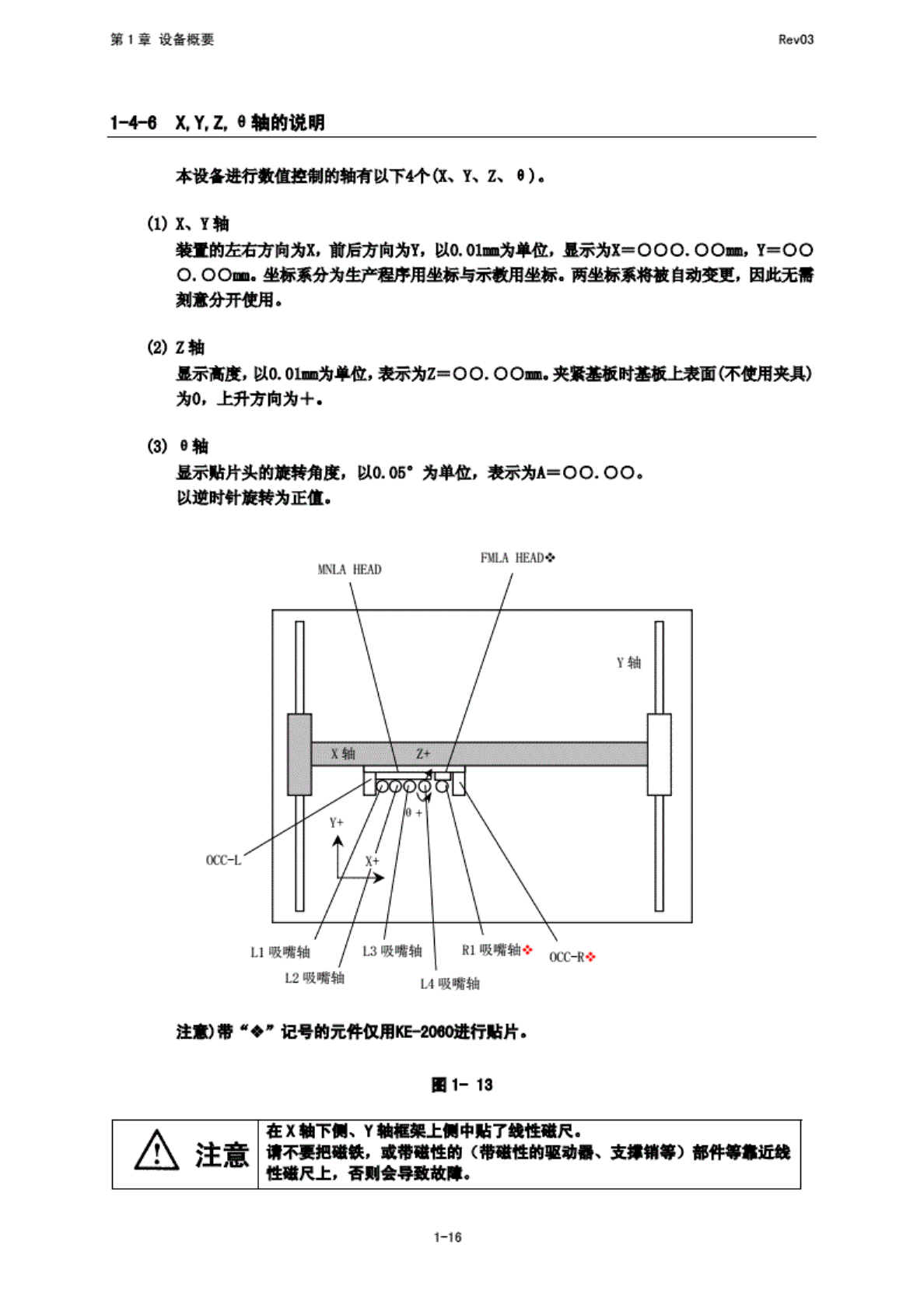
1-4-6
X,Y,L&
触
的说明
本
设备进
行数
值控制
的釉
有以
下好
(X、
Y、
Z、
9).
(1)
L
Y
轴
装置
的左右
方向为
X,
前后方
向为
Y,
以
0.01nra
为
单位,
显
示为工
=0。。.
。。m,
Y=OO
O.
OOm.
坐
标系分
为生产
程序用
坐标与
示教用
坐标.
两坐
标事将
被自动
变更,
因此
才需
刻
意分开
使用.
Z
轴
显示
高度,
以
0.03
为
单位,
表示为
Z=00.00
吨夹解
嘛时
基就上
表面坏
使用
夹具》
为
0,
上升
方向为
+.
9
轴
显
示贴片
头的睇
角度,
mo50
为
单位,
表承为
A=QO.O0.
以
逆时钟
旋转为
正近.
注意)
带"
记号
的元件
仅用
mow
进行
贴片.
BB1-
13
A
注意
在
X*
下偏、
Y
轴
框架上
《1
中站
了线性
强尺.
请
不要把
球铁,
或带
磁性的
(带磁
性的骗
动撕、
支撑
辅等)
部件等
,近治
性磁
尺上,
否国会
4m
散障.
1-16
第
1
章
设
备概要
RevO3
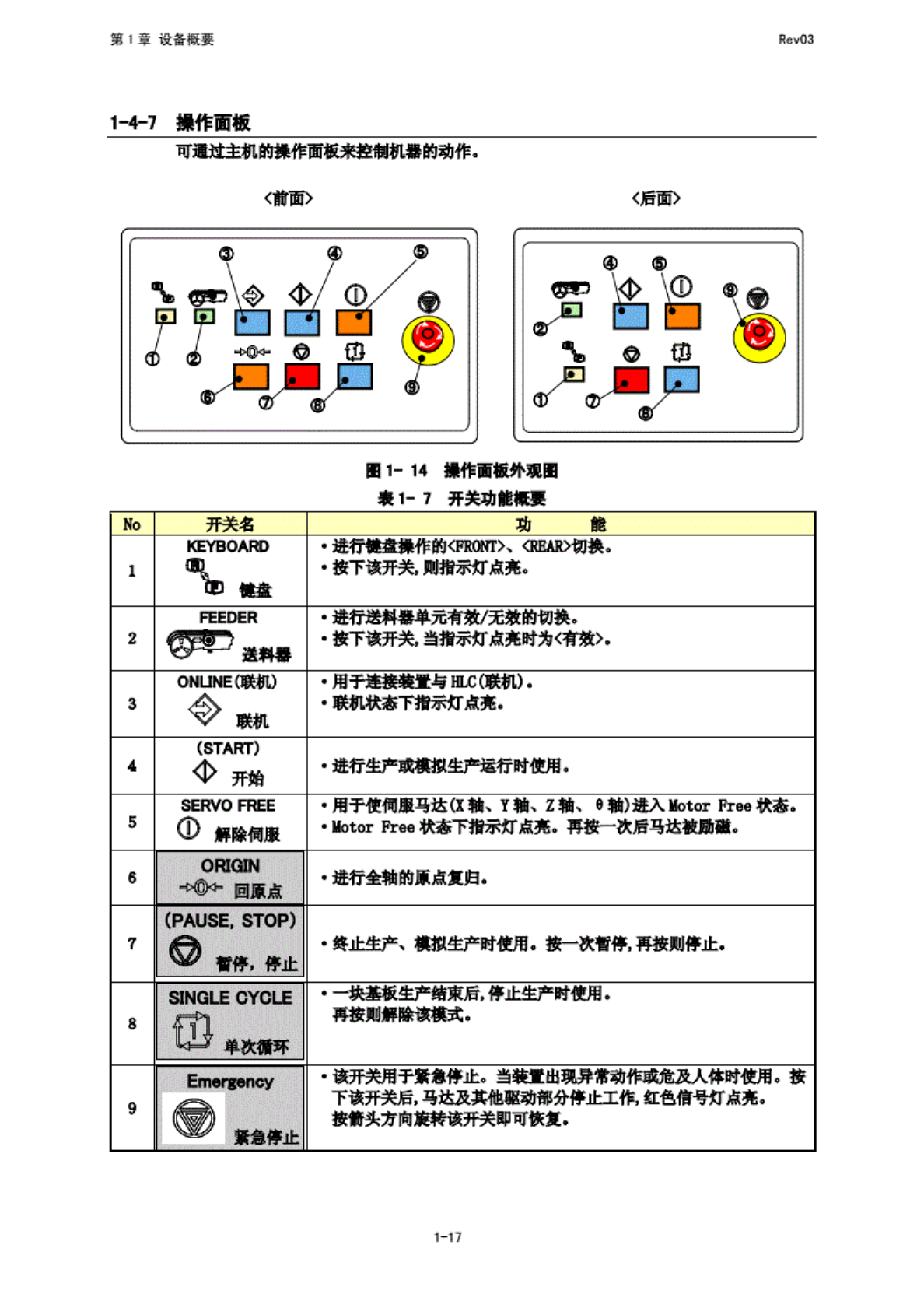
1-4-7
操
作面板
可通
过主机
的操作
面板来
控制
机器的
动作.
前面
《后面
S
1-14
操作
面板
轮观图
量
1-7
开关功
能悔要
而
开关名
功
能
1
KEYBOARD
端行
U盘操
作的幽
廊>、
<HEABj
切换.
,按
下读
开关
,则
指示灯
点亮.
2
FEEDER
•
进行
送料
暴单元
有效7
无效的
切换.
•
按下读
开关,
当指示
灯点亮
时为4
澈人
3
0NUNE0O)
令
肝新
"
联机
.用
于连接
装置与
HLC
停机
3
-
麻机
状态下
指示灯
点亮.
4
(START]
&
开始
-
进行
生产或
模拟
生产运
行时
使用,
5
SERVO
FREE
解
除伺服
用
于使伺
服马达
(
K
轴、
Y
轴、
Z
轴、
8轴)
避入
Motor
Free
状态.
-Motor
Ft
的
状蠢下
指示灯
点亮.
再
按一次
后马达
被助
破.
6
OFUGM
心须『
回源点
•
进行
全轴的
原点
复归.
7
(
PAL
SE,
STOP)
暂停,
停止
鲜止
生产、
地生
产时使
用.
按一次
看停,
再技期
停止.
8
SINGLE
CYCLE
O
单
次循环
•
一块基
板生产
绪束后
,停止
生产时
使用,
再接
期解
除蚓
式.
9
Er
nergeiw
界
》
紧
急停止
,读开
关用于
紧急停
止,
当建
置出现
异常动
作或危
及人
体叶
使用,
按
下该开
关后,
马达
及其驰
盟动部
分停止
H
作,
红色值
号灯
点亮.
按着头
方向族
转读开
关即可
恢复.
1-17