N7205A097E.pdf - 第218页
I/O MAP Bit L1(1)センサ リモ ートティーチング(実装位置#1) L1(1)Sensor remote teaching (Mount Pos#1) L2(4)センサ リモ ートティーチング(実装位置#2) L2(4)Sensor remote teaching (Mount Pos#2) L1(1) センサ リモ ートティーチング(右待機1、実装位置#1 L1(1) Sensor remote teaching(…
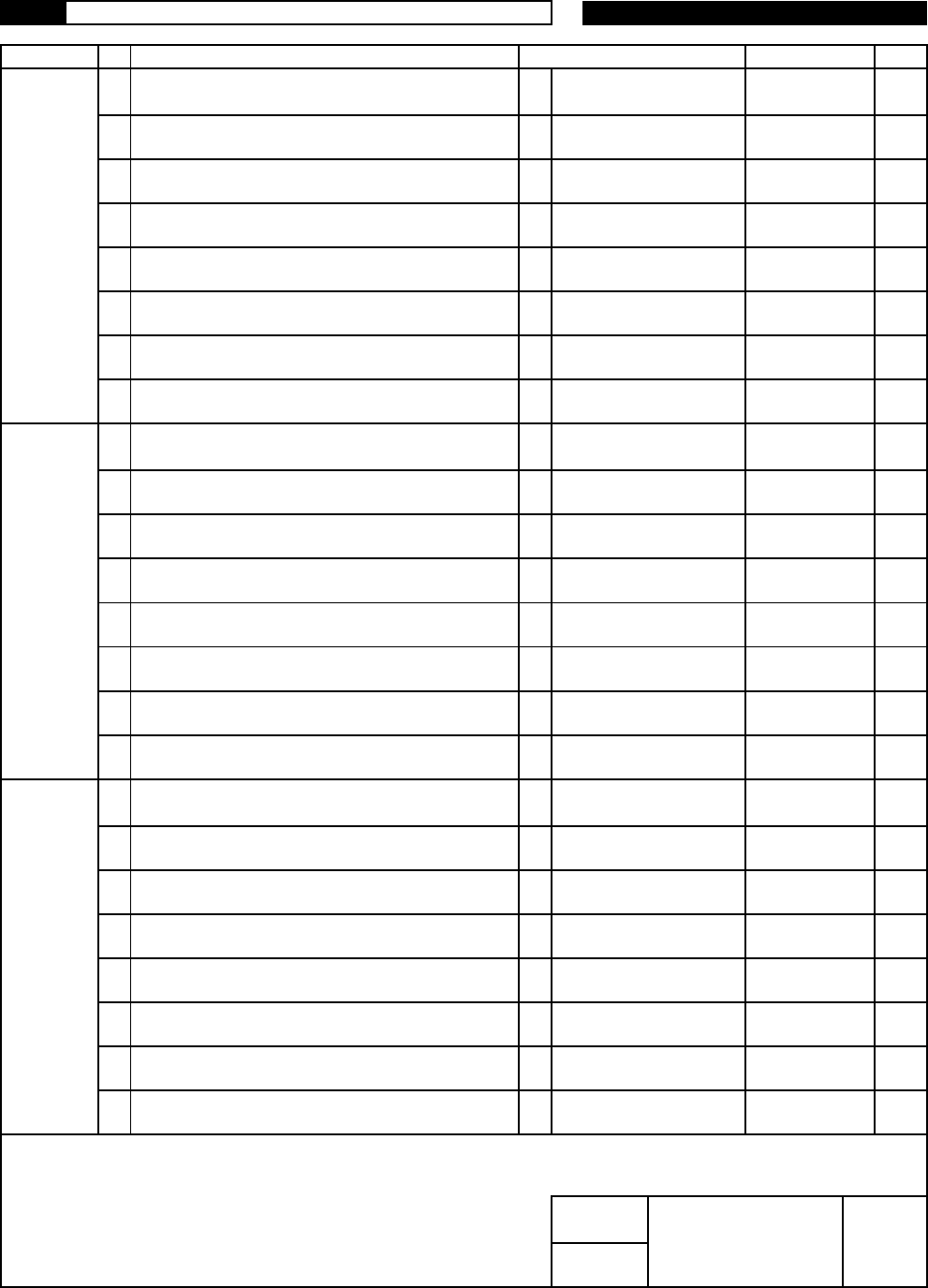
I/O MAP
Bit
自動運転中
Auto running
前工程待ち
Pre-process waiting
後工程待ち
Post-processing waitin
g
停止(トラブル)
Stop(Trouble)
基板排出
Board Eject
基板搬入ILK出力#1 (EMG)
PCB in ILK out#1(EMG)
基板搬入ILK出力#2 (COV)
PCB in ILK out#2(COV)
前工程生産終了(OPEND)
Production End(OPEND)
予備出力
Output reserve
シグナルタワー 青
Signal tower Blue
シグナルタワー 赤
Signal tower Red
シグナルタワー 黄
Signal tower Yellow
シグナルタワー 緑
Signal tower Green
ブザー
Buzzer
Fパーツ切れライト
Front Out of work light
Rパーツ切れライト
Rear Out of work light
ページ
12
21
B2003
B2001
B2001
B2001
B2001
OP
OP
OP
OP
OP
OP
OP
OP
機種
/
NPM-TT
図名
パナソニックファクトリー
I/O MAP
ソリューションズ㈱
71
点灯
Lighting
61
点灯
Lighting
B2002
51
ON
On
41
点灯
Lighting
31
点灯
Lighting
B2001
Lighting
21
点灯
Lighting
OT04*
11
点灯
#0_0024
出力/OUT
0
71
終了
End
61
ILK状態出力
ILK Output
51
ILK状態出力
ILK Output
41
排出
Eject
31
停止
STOP
Wait
21
待機
Wait
OT03*
11
待機
Note
出力/OUT
01
自動運転
#0_0023 RUN
Address Name Contents ID
NPM
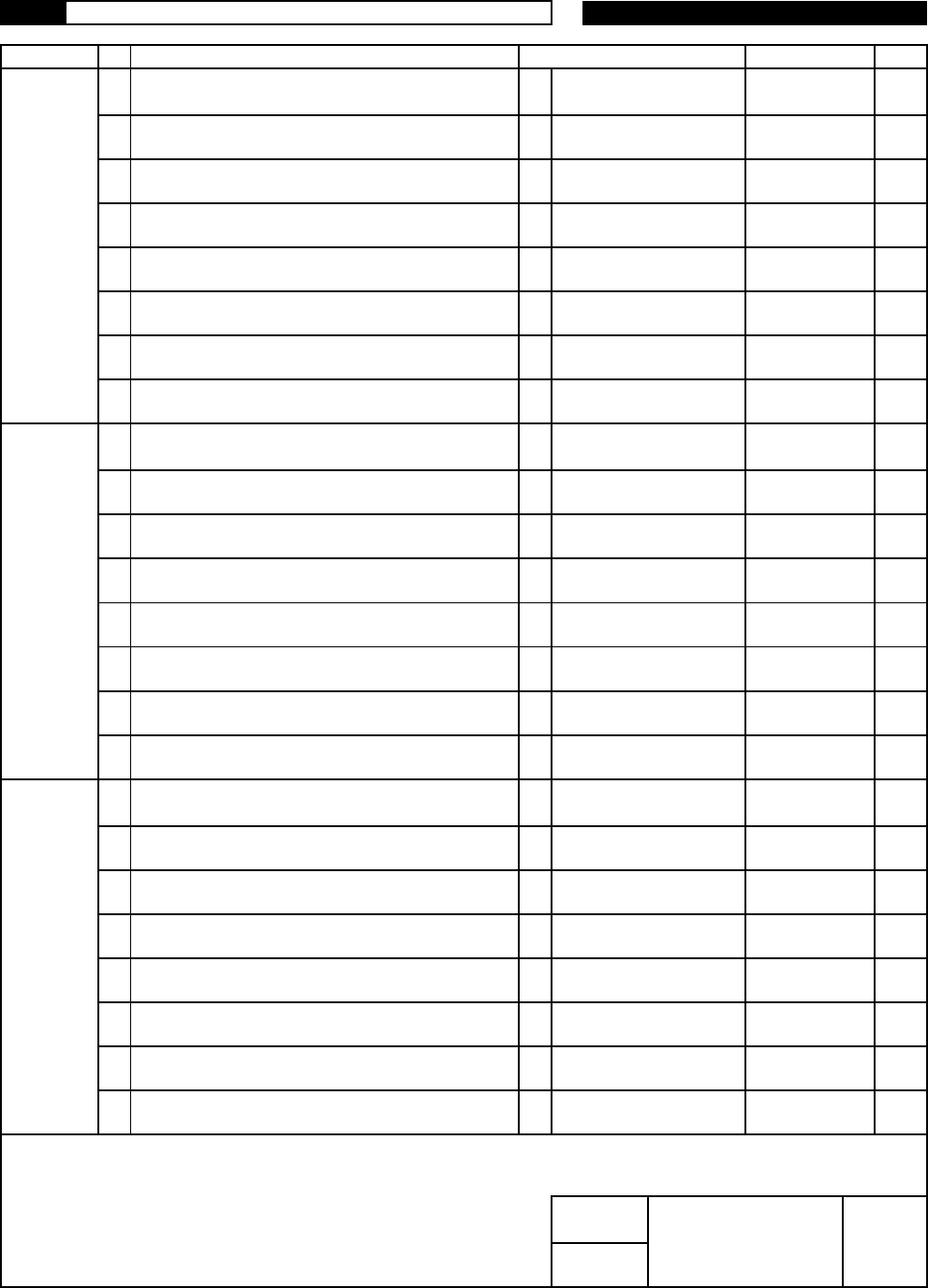
I/O MAP
Bit
L1(1)センサ リモートティーチング(実装位置#1)
L1(1)Sensor remote teaching (Mount Pos#1)
L2(4)センサ リモートティーチング(実装位置#2)
L2(4)Sensor remote teaching (Mount Pos#2)
L1(1) センサ リモートティーチング(右待機1、実装位置#1
L1(1) Sensor remote teaching(R WaitMntPos#1)
L1(1) センサ リモートティーチング(左待機)
L1(1) Sensor remote teaching (Left Wait)
L2(4) センサ リモートティーチング(右待機、実装位置#2
)
L2(4) Sensor remote teaching(R WaitMntPos#2)
L2(4) センサ リモートティーチング(左待機)
L2(4) Sensor remote teaching (Left Wait)
L1(1) センサ リモートティーチング(右延長コンベア)
L1(1) Sensor remote teaching(Right Ext Conv)
L1(1) センサ リモートティーチング(左延長コンベア)
L1(1) Sensor remote teaching(Left Ext Conv)
L1(1) 右待機エリアコンベア 起動/Stop
L1(1) Right Standby Conv Start/Stop
L1(1) 実装位置#1エリアコンベア起動/Stop
L1(1) Mount Pos. #1 Area Conv Start/Stop
L1(1) 左待機エリアコンベア起動/Stop
L1(1) Left Standby Conv Start/Stop
L2(4) センサリモートティーチング(右延長コンベア)
L2(4) Sensor remote teaching(Left Ext Conv)
L2(4) 右待機エリアコンベア起動/Stop
L2(4) Right Standby Conv Start/Stop
L2(4) 実装位置#2エリアコンベア起動/Stop
L2(4) Mount Pos. #2 Area Conv Start/Stop
L2(4) 左待機エリアコンベア起動/Stop
L2(4) Left Standby Conv Start/Stop
L2(4) センサリモートティーチング(左延長コンベア)
L2(4) Sensor remote teaching(Left Ext Conv)
L1(1) 右延長コンベア起動
L1(1) Right Ex Conv Start/Stop
L2(4) 右延長コンベア起動
L2(4) Right Ex Conv Start/Stop
L1(1) 左延長コンベア起動
L1(1) Left Ex Conv Start/Stop
L2(4) 左延長コンベア起動
L2(4) Left Ex Conv Start/Stop
前工程 隣接装置安全動作出力
Pre-process Adj-Device Safety Output Action
L1(1)前工程 搬送センサ状態出力
L1(1) Pre-process Conv Sensor Output State
後工程 隣接装置安全動作出力
Post-process Adj-Device Safety Output Action
L1(1)後工程 搬送センサ状態出力
L1(1) Post-process Conv Seneor Output State
ページ
13
21
OP
OP
OP
OP
OP
OP
OP
OP
機種
/
NPM-TT
図名
パナソニックファクトリー
I/O MAP
ソリューションズ㈱
7*
状態出力
Status Output
6*
状態出力
Status Output
5*
状態出力
Status Output
4*
状態出力
Status Output
31
起動
Start
Start
21
起動
Start
OT12*
11
起動
#1_0062 Start
出力/OUT
01
起動
71
ティーチング
Teaching
61
起動
Start
51
起動
Start
41
起動
Start
31
ティーチング
Teaching
Start
21
起動
Start
OT11*
11
起動
#1_0061 Start
出力/OUT
01
起動
71
ティーチング
Teaching
61
ティーチング
Teaching
51
ティーチング
Teaching
41
ティーチング
Teaching
31
ティーチング
Teaching
Teaching
21
ティーチング
Teaching
OT10*
11
ティーチング
Note
出力/OUT
01
ティーチング
#1_0060 Teaching
Address Name Contents ID
NPM
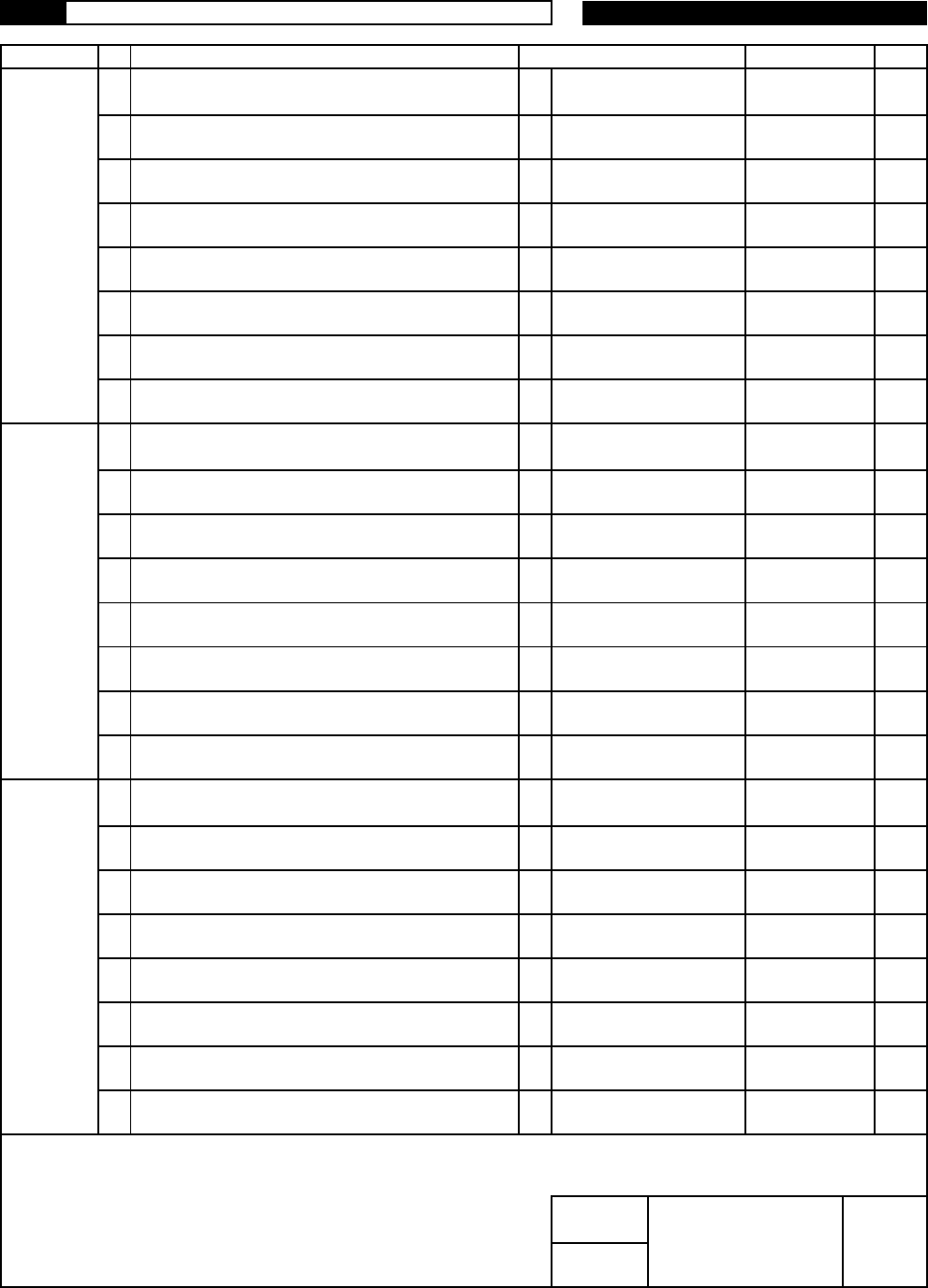
I/O MAP
Bit
L1(-) 下受け交換上昇(実装位置#1)
L1(-) Holder Change Up (Mount Pos. #1)
L1(-) 下受け交換下降(実装位置#1)
L1(-) Holder Change Down (Mount Pos. #1)
L2(-) 下受け交換上昇(実装位置#2)
L2(-) Holder Change Up (Mount Pos. #2)
L2(-) 下受け交換下降(実装位置#2)
L2(-) Holder Change Down (Mount Pos. #2)
L1(1) 基板下受け上昇(実装位置#1)
L1(1) PCB Holder Up (Mount Pos. #1)
L1(1) 基板下受け下降(実装位置#1)
L1(1) PCB Holder Down (Mount Pos. #1)
L2(4) 基板下受け上昇(実装位置#2)
L2(4) PCB Holder Up (Mount Pos. #2)
L2(4) 基板下受け下降(実装位置#2)
L2(4) PCB Holder Down (Mount Pos. #2)
F 基板排圧切り替え
F PCB Exhaust Pressure Change
F 基板吸着切り替え
F PCB Vacuum Pressure Change
R 基板排圧切り替え
R PCB Exhaust Pressure Change
R 基板吸着切り替え
R PCB Vacuum Pressure Change
L2(4) 前工程同期要求信号
L2(4) Pre-process Sync Demand Signal
L2(4) 前工程中間待機基板要求信号
L2(4) PreProc M Standby PCB Demand Signal
L2(4) 後工程同期要求信号
L2(4) Post-process Sync Demand Signal
L2(4) 前工程 搬送センサ状態出力
L2(4) Pre-process Conveyor Sensor Output State
ページ
14
21
OP
OP
OP
OP
R4135
R4136
OP
OP
OP
OP
機種
/
NPM-TT
図名
パナソニックファクトリー
I/O MAP
ソリューションズ㈱
7*
状態出力
Status Output
6*
状態出力
Status Output
5*
状態出力
Status Output
4*
状態出力
Status Output
3
2
OT14*
1
#1_0064
出力/OUT
0
71
下降
Down
R4137
61
上昇
Up
51
下降
Down
41
上昇
Up
R4134
31
下降
Down
Down
21
上昇
Up
OT13*
11
下降
Note
出力/OUT
01
上昇
#1_0063 Up
Address Name Contents ID
NPM