N7205A085E.pdf - 第308页
I/O MAP NPM Bit Contents ID Note Name Address 出力/OUT 1 1 1 1 1 1 1 1 出力/OUT * * * * 図名 パナソニックファクトリー ページ I/O MAP ソリューションズ(株) 機種 8 NPM-W 16 Status Output 状態出力 Status Output Status Output 状態出力 Status Output 状態出力 R4135 R…
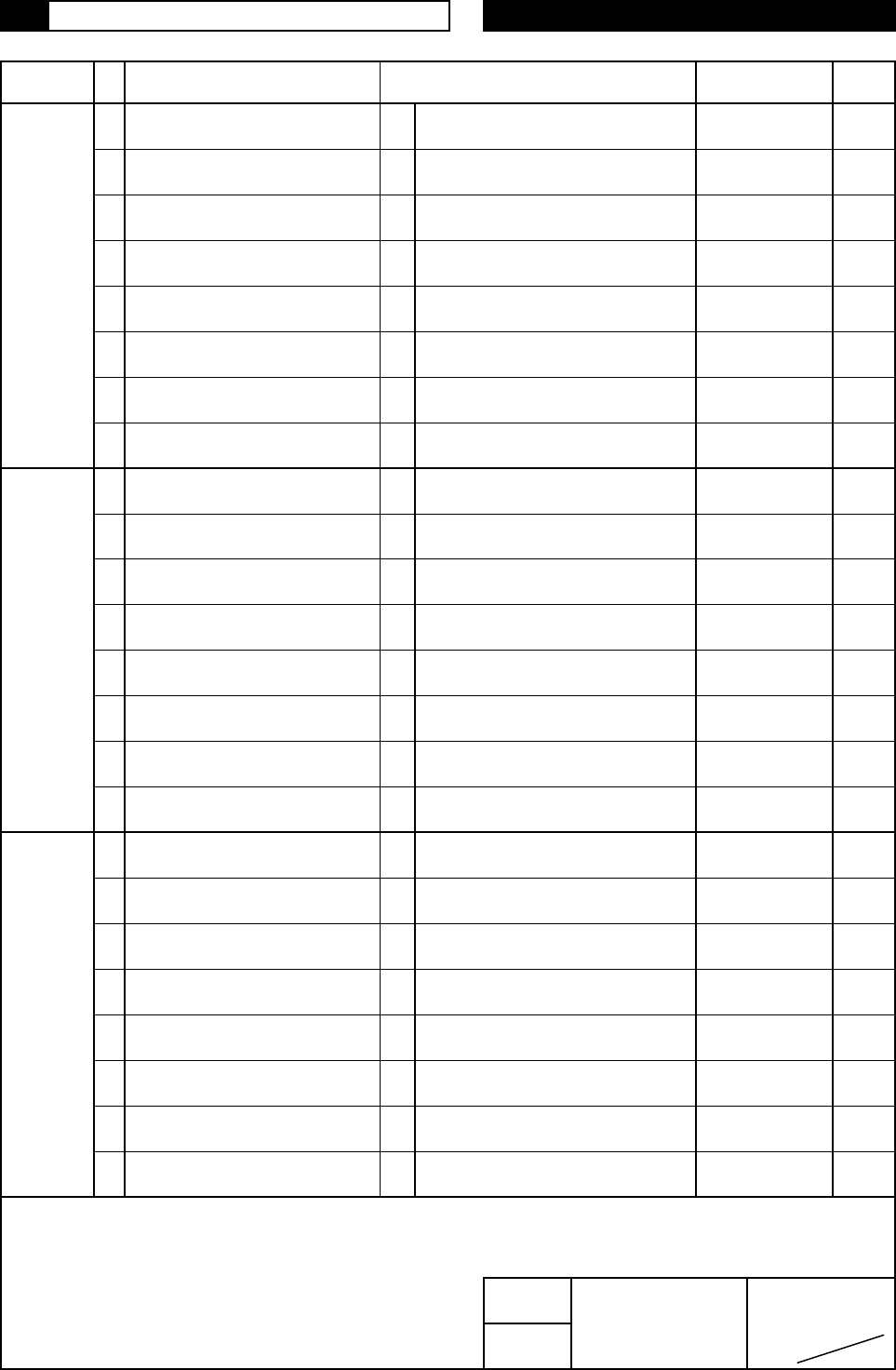
I/O MAP NPM
Bit Contents ID NoteNameAddress
出力/OUT 1
1
1
1
1
1
1
1
出力/OUT 1
1
1
1
1
1
1
1
出力/OUT 1
1
1
1
*
*
*
*
図名 パナソニックファクトリー ページ
I/O MAP ソリューションズ(株)
機種
7
NPM-W 16
OP
OP
OP
OP
Start
起動
Start
状態出力
Status Output
Start
起動
Start
起動
Start
起動
Start
起動
Start
起動
Start
起動
状態出力
Status Output
状態出力
Status Output
状態出力
Status Output
OP
OP
OP
OP
ティーチング
Teaching
ティーチング
Teaching
起動
Start
起動
Start
起動
ティーチング
Teaching
ティーチング
Teaching
ティーチング
Teaching
ティーチング
Teaching
ティーチング
Teaching
ティーチング
Teaching
ティーチング
ティーチング
Teaching
Teaching
6
後工程 隣接装置安全出力
Post-process Adj-Device Safety Output Action
7
L1(1)後工程 搬送センサ状態出力
L1(1) Post-process Cnvy Seneor Output State
4
前工程 隣接装置安全出力
Pre-process Adj-Device Safety Output Action
5
L1(1)前工程 搬送センサ状態出力
L1(1) Pre-process Cnvy Sensor Output State
2
L1(1) 左延長コンベア起動
L1(1) Left Ex Conv Start/Stop
3
L2(4) 左延長コンベア起動
L2(4) Left Ex Conv Start/Stop
#1_0062 L1(1) Right Ex Conv Start/Stop
1
L2(4) 右延長コンベア起動
0
L1(1) 右延長コンベア起動
L2(4) Right Ex Conv Start/Stop
6
L2(4) 左待機エリアコンベア起動/Stop
L2(4) Left Standby Conv Start/Stop
7
L2(4) センサリモートティーチング(左延長コンベア)
L2(4) Sensor remote teaching(Left Ext cnvy)
4
L2(4) 右待機エリアコンベア起動/Stop
L2(4) Right Standby Conv Start/Stop
5
L2(4) 実装位置#2エリアコンベア起動/Stop
L2(4) Mount Pos. #2 Area Conv Start/Stop
2
L1(1) 左待機エリアコンベア起動/Stop
L1(1) Left Standby Conv Start/Stop
3
L2(4) センサリモートティーチング(右延長コンベア)
L2(4) Sensor remote teaching(Left Ext cnvy)
#1_0061 L1(1) Right Standby Conv Start/Stop
1
L1(1) 実装位置#1エリアコンベア起動/Stop
0
L1(1) 右待機エリアコンベア起動/Stop
Mount Pos. #1 Area Conv Start/Stop
6
L1(1) センサ リモートティーチング(右延長コンベア)
L1(1) Sensor remote teaching(Right Ext cnvy)
7
L1(1) センサ リモートティーチング(左延長コンベア)
L1(1) Sensor remote teaching(Left Ext cnvy)
4
L2(4) センサ リモートティーチング(右待機、実装位置#2)
L2(4) Sensor remote teaching(R WaitMntPos#2)
5
L2(4) センサ リモートティーチング(左待機)
L2(4) Sensor remote teaching (Left Wait)
2
L1(1) センサ リモートティーチング(右待機、実装位置#1)
L1(1) Sensor remote teaching(R WaitMntPos#1)
3
L1(1) センサ リモートティーチング(左待機)
L1(1) Sensor remote teaching (Left Wait)
#1_0060 L1(1) Sensor remote teaching (Mount Pos#1)
1
L2(4) センサ リモートティーチング(実装位置#2)
0
L1(1) センサ リモートティーチング(実装位置#1)
L2(4) Sensor remote teaching (Mount Pos#2)
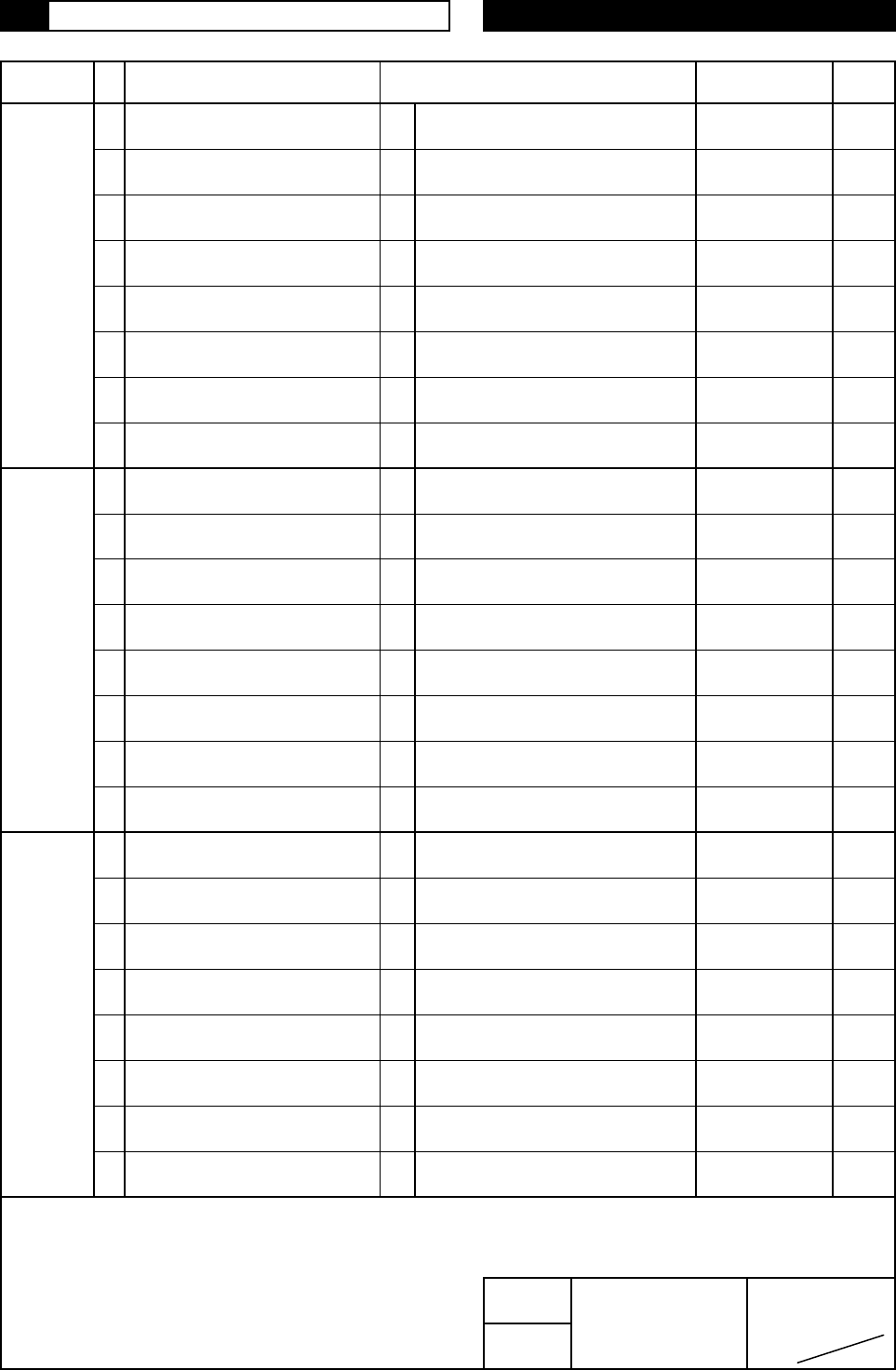
I/O MAP NPM
Bit Contents ID NoteNameAddress
出力/OUT 1
1
1
1
1
1
1
1
出力/OUT
*
*
*
*
図名 パナソニックファクトリー ページ
I/O MAP ソリューションズ(株)
機種
8
NPM-W 16
Status Output
状態出力
Status Output
Status Output
状態出力
Status Output
状態出力
R4135
R4136
R4137
状態出力
Down
上昇
Up
下降
Down
上昇
Up
上昇
Up
Down
下降
Up
下降
Down
下降
R4130
R4131
R4132
R4133
R4134
7
6
5
4
3
2
1
0
7
L2(4) 前工程 搬送センサー状態出力
L2(4) Pre-process Conveyor Sensor Output State
R4147
6
L2(4) 後工程同期要求信号
L2(4) Post-process Sync Demand Signal
OP
OP
OP
OP
R4144
R4145
R4146
4
L2(4) 前工程同期要求信号
L2(4) Pre-process Sync Demand Signal
5
L2(4) 前工程中間待機基板要求信号
L2(4) PreProc M Standby PCB Demand Signal
2
予備出力
Output reserve
3
予備出力
Output reserve
#1_0064 Output reserve
1
予備出力
0
予備出力
Output reserve
6
L2(4) 基板下受け上昇(実装位置#2)
L2(4) PCB Holder Up (Mount Pos. #2)
7
L2(4) 基板下受け下降(実装位置#2)
L2(4) PCB Holder Down (Mount Pos. #2)
4
L1(1) 基板下受け上昇(実装位置#1)
L1(1) PCB Holder Up (Mount Pos. #1)
5
L1(1) 基板下受け下降(実装位置#1)
L1(1) PCB Holder Down (Mount Pos. #1)
2
L2(-) 下受け交換上昇(実装位置#2)
L2(-) Holder Change Up (Mount Pos. #2)
3
L2(-) 下受け交換下降(実装位置#2)
L2(-) Holder Change Down (Mount Pos. #2)
#1_0063 L1(-) Holder Change Up (Mount Pos. #1)
1
L1(-) 下受け交換下降(実装位置#1)
0
L1(-) 下受け交換上昇(実装位置#1)
L1(-) Holder Change Down (Mount Pos. #1)
上昇
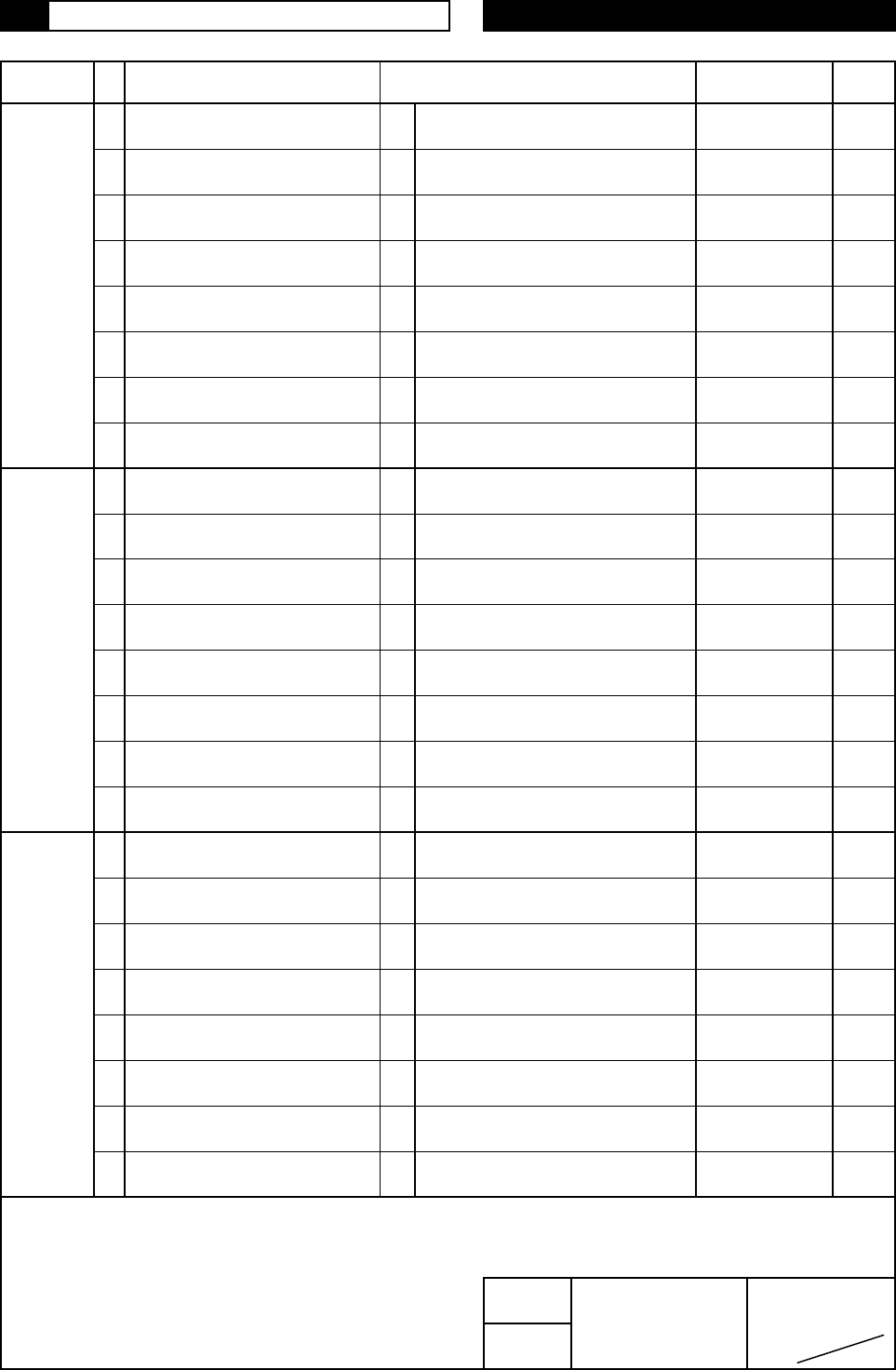
I/O MAP NPM
Bit Contents ID NoteNameAddress
入力/IN 0
1
0
0
0
1
0
0
入力/IN 1
1
1
1
1
1
1
入力/IN 0
0
1
0
*
*
*
*
図名 パナソニックファクトリー ページ
I/O MAP ソリューションズ(株)
機種
9
NPM-W 16
状態入力
Status Input
状態入力
Status Input
状態入力
Status Input
状態入力
Status Input
異常
Trouble
正流れ
Positive flow
検出
Detect
異常
Trouble
OP
OP
OP
解除
Release
挿入
Set
検出
Detect
検出
解除
Release
挿入
Set
Detect
検出
Detect
検出
Detect
検出
Detect
Detect
検出
検出
Detect
検出
Detect
検出
Detect
検出
Detect
B1212
S3211
B1210
B1201
B1202
B1203
B1204
B1205
B1206
B1207
S3217
B1216
B1200
検出
Detect
7
搬送仕様bit3
Transfer spec bit3
6
搬送仕様bit2
Transfer spec bit2
4
搬送仕様bit0
Transfer spec bit0
5
搬送仕様bit1
Transfer spec bit1
2
R 廃棄BOX有無検出
R Detection of discarding BOX exist or not
3
搬送仕様(流れ方向)
Transfer spec (Flow direction)
#2_0082 Detection of ceiling fan alarm
1
天井FANアラーム検出2
0
天井FANアラーム検出
Detection of ceiling|fan alarm 2
6
R 台車テーブルロック解除確認
R Cart table unlock confirm
7
R 台車挿入確認
R Cart setting check
4
R 台車固定ユニット接続
R Cart fix unit connect
5
R 台車中継ユニット接続
R Cart joint unit connection
2
F 廃棄BOX有無検出
F Detection of discarding BOX exist or not
3
予備入力
Input reserve
#2_0081 F Cart table unlock confirm
1
F 台車挿入確認
0
F台車テーブルロック解除確認
F Cart setting check
6
R フィーダ開口部センサ2
R Feeder Cover 2
7
R フィーダ開口部センサ1
R Feeder Cover 1
4
R フィーダ開口部センサ4
R Feeder Cover 4
5
R フィーダ開口部センサ3
R Feeder Cover 3
2
F フィーダ開口部センサ2
F Feeder Cover 2
3
F フィーダ開口部センサ1
F Feeder Cover 1
#2_0080 F Feeder Cover 4
1
F フィーダ開口部センサ3
0
F フィーダ開口部センサ4
F Feeder Cover 3