00196709-02-UM-SX4DX4-KO.pdf - 第118页
3 기술 데이터 및 어셈블리 사용자 매뉴얼 SIPLACE SX4/DX4 3.5 실장 헤드 소프트웨어 버전 SC.704.xx 에서 업데이트 02/2011 한글판 118 3.5.2.1 설명 M ul tiStar 는 높은 실장 성능과 높은 유 연성의 2 가지 상반된 특 성을 결 합합니다 . 최대 27 mm x 27 mm 의 더 작 은 컴포넌트를 처리 할 때 M ul tiStar 는 C ollec …
사용자 매뉴얼 SIPLACE SX4/DX4 3 기술 데이터 및 어셈블리
소프트웨어 버전 SC.704.xx 에서 업데이트 02/2011 한글판 3.5 실장 헤드
117
3
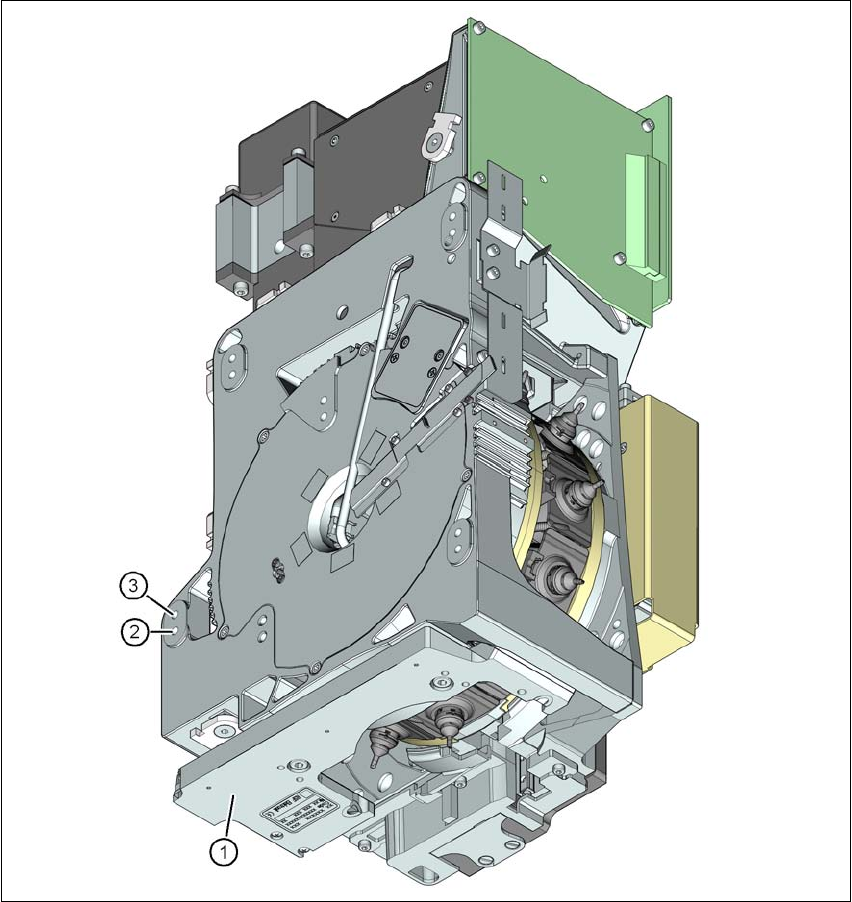
그림 . 3.5 - 5 SIPLACE MultiStar - 뒷면 보기 , 기능 그룹 파트 3
(1) 컴포넌트 센서
(2) 최대 11.5 mm 의 컴포넌트 높이를 위한 어셈블리 위치
(3) 최대 6 mm 의 컴포넌트 높이를 위한 어셈블리 위치
3 기술 데이터 및 어셈블리 사용자 매뉴얼 SIPLACE SX4/DX4
3.5 실장 헤드 소프트웨어 버전 SC.704.xx 에서 업데이트 02/2011 한글판
118
3.5.2.1 설명
MultiStar 는 높은 실장 성능과 높은 유연성의 2 가지 상반된 특성을 결합합니다 . 최대 27 mm x
27 mm 의 더 작은 컴포넌트를 처리할 때 MultiStar 는 Collect&Place 방법을 사용하여 더 높은
실장 성능을 보장합니다 . 이 경우 , 컴포넌트들은 통합된 컴포넌트 카메라로 광학적으로 센터링
됩니다 . 최대 50 mm x 40 mm 의 더 큰 컴포넌트를 처리할 때는 실장기가 컴포넌트들이 고정식
카메라로 광학적으로 센터링되는 Pick&Place 원리를 사용합니다 .
2 가지 실장 원리인 C&P 와 P&P 의 결합으로 MultiStar 가 그 이름을 얻었습니다 . 그것은 CPP 헤
드라고
도 합니다 .
CPP 헤드의 12 세그먼트는 스타 모양으로 정렬됩니다 . 높은 토크를 갖는 토크 모터가 스타 축
인 가로 축 주위로 스타를 회전시킵니다 .
각 세그먼트에는 노즐을 회전시키기 위한 자체의 DP 드라이브가 있습니다 . 따라서 단일 헤드 스
테이션에서는 노즐이 더 이상 정확한 위치로 회전되지 않습니다 . 노즐은 언제라도 각기 개별적
으로 필요할 때 실장 위치로 회전할 수 있습니다 .
각 세그먼트에 별도의 진공 장치가 하나씩 있습니다 . 따라서 진공과 공기 접촉 간의 전환 시간이
크게 단축됩니다 . 또한 이를 통해 각 노즐의 홀딩 회로에서 진공 상태를 점검할 수 있습니다 .
세그먼트의 Z 드라이브는 선형 경로 측정 시스템이 있는 선
형 모터로 구현되기 때문에 대단히 정
확합니다 . 픽업 / 실장 위치에서 Z 드라이브는 세그먼트를 위 , 아래로 이동시킵니다 .
다른 모든 SIPLACE Collect&Place 헤드의 경우에서처럼 , 디지털 컴포넌트 카메라가 실장 헤드
에 통합됩니다 . 컴포넌트의 광학 센터링을 위한 추가 이동 경로가 없기 때문에 더 높은 처리 속
도가 가능합니다 .
실장 헤드 아래에 있는 컴포넌트 센서는 픽업 / 실장 위치에서 컴포넌트를 측정합니다 . Z 축이 이
동할 때마다 노즐 끝에서 측정이 이루어지고 노즐에 컴포넌트가 있는지 여부 및 컴포넌트가 얼마
나 높은지에 대해 확인이 이루어질 수 있습니다 .
3.5.2.2 SIPLACE MultiStar 의 어셈블리 위치
CPP 헤드는 다음과 같은 2 가지 위치로 헤드 마운트에 장착될 수 있습니다 .
– MultiStar 를 맨 위 어셈블리 위치에
이 위치에서 , 모든 컴포넌트들은 최대 50 mm x 40 mm 의 크기와 11.5 mm 의 높이까지 처
리될 수 있습니다 . 3
– MultiStar 를 맨 아래 어셈블리 위치에
이 위치에서 , CPP 헤드는 Collect&Place 방법을 사용하여 최대
27 mm x 27 mm 의 크기 및 6 mm 의 높이로 컴포넌트를 실장합니다 . 3
사용자 매뉴얼 SIPLACE SX4/DX4 3 기술 데이터 및 어셈블리
소프트웨어 버전 SC.704.xx 에서 업데이트 02/2011 한글판 3.5 실장 헤드
119
어셈블리 위치를 정의할 때는 다음 규칙을 준수하십시오 .
→ 헤드 높이는 동일한 실장 영역의 모든 헤드에 대해 같아야 합니다 .
→ CPP 헤드가 다음과 같은 어셈블리와 결합되는 경우에는 CPP 헤드를 항상 맨 위 어셈블리
위치에 설치하십시오 .
– 고정식 컴포넌트 카메라
– 매트릭스 트레이 체인저
– TwinStar
3.5.2.3 처리될 컴포넌트 범위의 등급 분류
3
컴포넌트 등급 컴포넌트 크기 CPP 헤드의 어셈블
리
a
위치
컴포넌트 높이 컴포넌트 카메라
유형
작은 컴포넌트
K_BE
01005
b
-
27 mm x 2 7 mm
사이
최상 최대 8.5 mm
헤드 카메라 , 타
입29/30
하단 최대 6.0 mm
작은 컴포넌트
K_BE
01005 -
16 mm x 1 6 mm
사이
최상 최대 8.5 mm
헤드 카메라 , 타입
38
하단 최대 6.0 mm
중간 크기의 컴
포넌트 , 타입
M_BE_1
< 27 x 27 mm
최상
8.5 에서
11.5 mm 사이
고정식 컴포넌트
카메라 ,
타입 33
하단 가능하지 않음
중간 크기의 컴
포넌트 , 타입
M_BE_2
27 mm x 27 m
m 에서
32 mm x 3 2 mm
사이
최상 11.5 mm
하단 가능하지 않음
큰 컴포넌트
G_BE
32 mm x 32 mm
에서
50 mm x 40 m
m 사이
최상 최대 11.5 mm
고정식 컴포넌트
카메라 ,
타입 33
하단 가능하지 않음
표 . 3.5 - 1처리될 컴포넌트 범위의 등급 분류
a) 118 페이지의 3.5.2.2 단원에 있는 어셈블리 위치 높이에 대한 규칙을 준수하십시오 .
b) 01005 컴포넌트 : 카메라 타입 29/30, 더 높은 품질 요건에는 카메라 타입 38 이 권장됨 .