CP842规格书-中文.pdf - 第10页
4. 4. 4. 4. 机器构成 机器构成 机器构成 机器构成 - 8 - CP84 2 CP84 2 CP84 2 CP84 2- - - - 01040 5R 0104 05R 0104 05R 0104 05R_S _S _S _S 4.4 4.4 4.4 4.4 相机单元 相机单元 相机单元 相机单元 ( ( ( (元件识别 元件识别 元件识别 元件识别) ) ) ) 装备有可处理 0603 ,1005 和 SMIN 等微小元件…
4.
4. 4.
4. 机器构成
机器构成机器构成
机器构成
- 7 -
CP842
CP842CP842
CP842-
--
-010405R
010405R010405R
010405R_S
_S_S
_S
4.3
4.34.3
4.3 元件供料平台
元件供料平台元件供料平台
元件供料平台(D
(D(D
(D轴
轴轴
轴)
))
)部分
部分部分
部分
1) 搭载元件种类
CP-842E 140 种(使用70×2平台,8mm 料带时)
CP-842ME 80 种(使用40×2平台,8mm 料带时)
2) 平台驱动方式 2马达/2传动装置方式
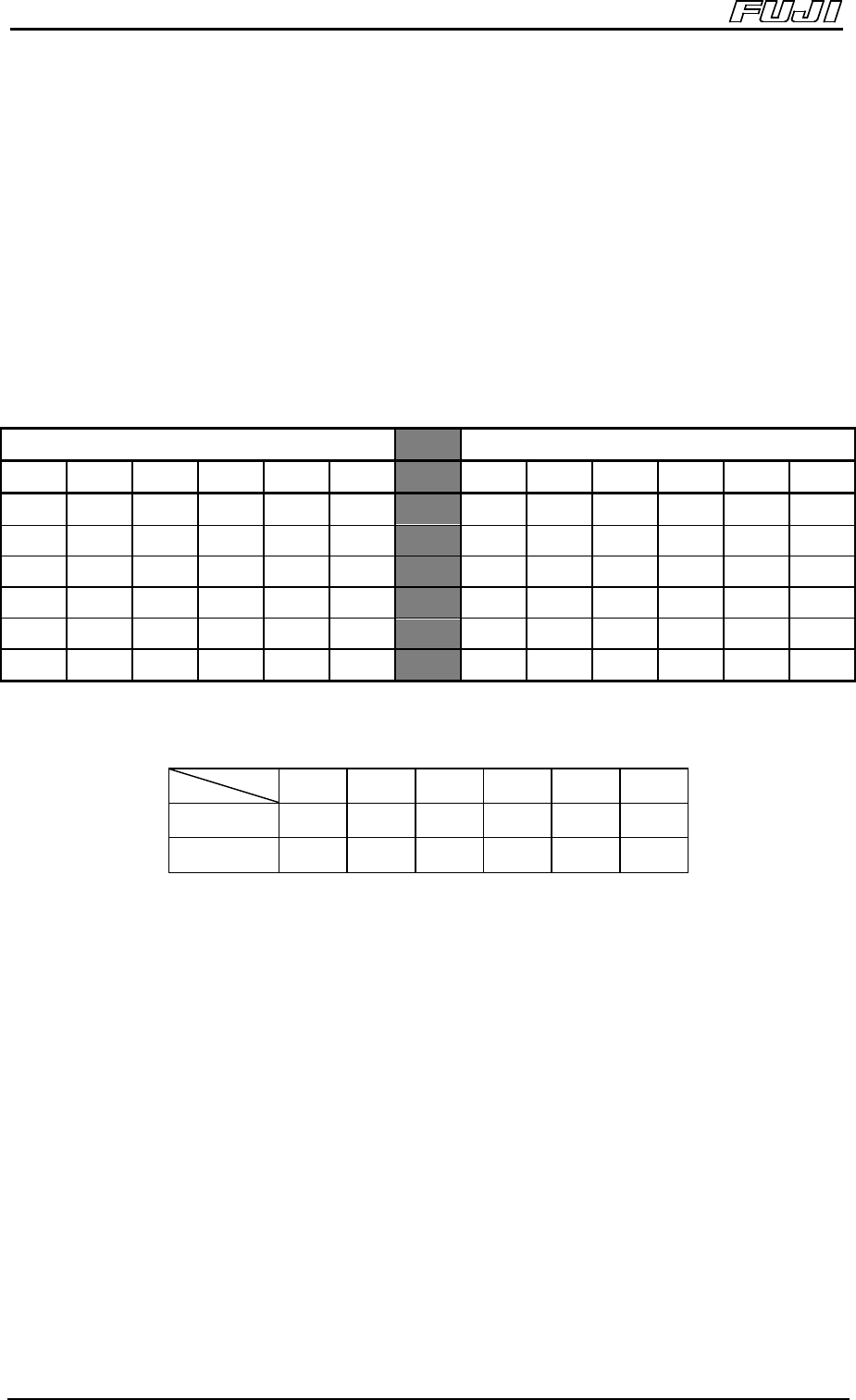
3) 供料器占有间距
相同宽度的供料器连续安装的场合,或者宽度不同的供料器混合安装的场合参照以
下的一览表,在供料平台上进行安装。
左 边
基准 右 边
32E
32纸
24 16 12 8 W 8121624
32纸
32E
2P 3P 2P 2P 2P 1P 8 1P 2P 2P 2P 2P 2P
3P 3P 2P 2P 2P 2P 12 2P 2P 2P 2P 3P 3P
3P 3P 2P 2P 2P 2P 16 2P 2P 2P 2P 3P 3P
3P 3P 3P 2P 2P 2P 24 2P 2P 2P 3P 3P 3P
3P 3P 3P 3P 3P 2P
32纸
3P 3P 3P 3P 3P 3P
3P 3P 3P 3P 3P 2P 32E 2P 3P 3P 3P 3P 3P
※∶上表中显示的是从操作者侧所见到的供料器安装位置。
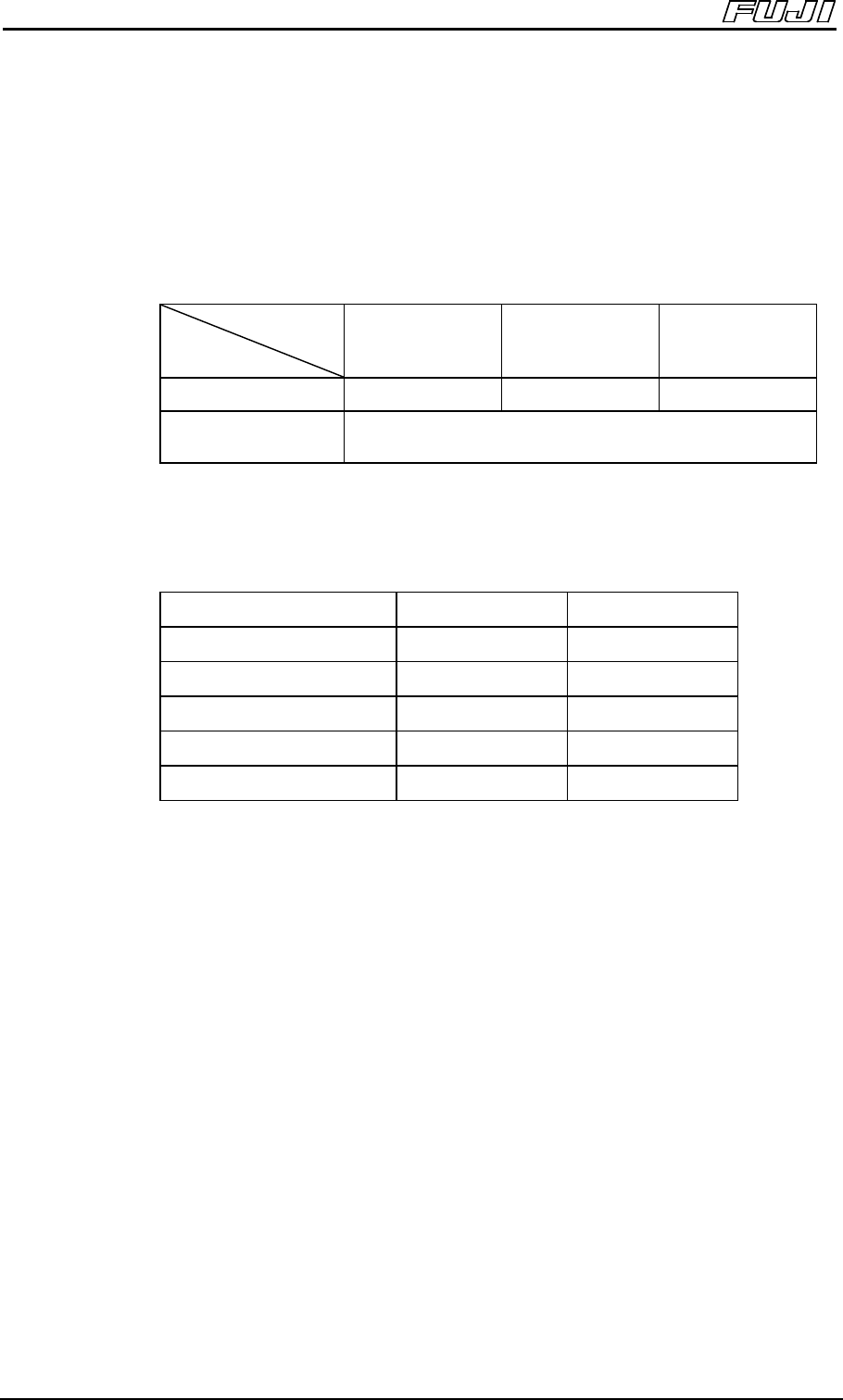
4) 供料平台边端的安装
W8 W12 W16 W24
W32纸
W32E
D1
○×××××
D70(40)
○×××××
4.
4. 4.
4. 机器构成
机器构成机器构成
机器构成
- 8 -
CP842
CP842CP842
CP842-
--
-010405R
010405R010405R
010405R_S
_S_S
_S
4.4
4.44.4
4.4 相机单元
相机单元相机单元
相机单元(
((
(元件识别
元件识别元件识别
元件识别)
))
)
装备有可处理0603,1005和SMIN等微小元件的高分辨率窄视野相机,和以
SOIC,PLCC,CSP等大型元件为对象的大视野相机。此外,可在背光光源(可以清
晰的捕捉外形轮廓)和前光光源(擅长于判别PLCC等的J引脚和CSP等的锡球)之
间进行切换,具有通用性。
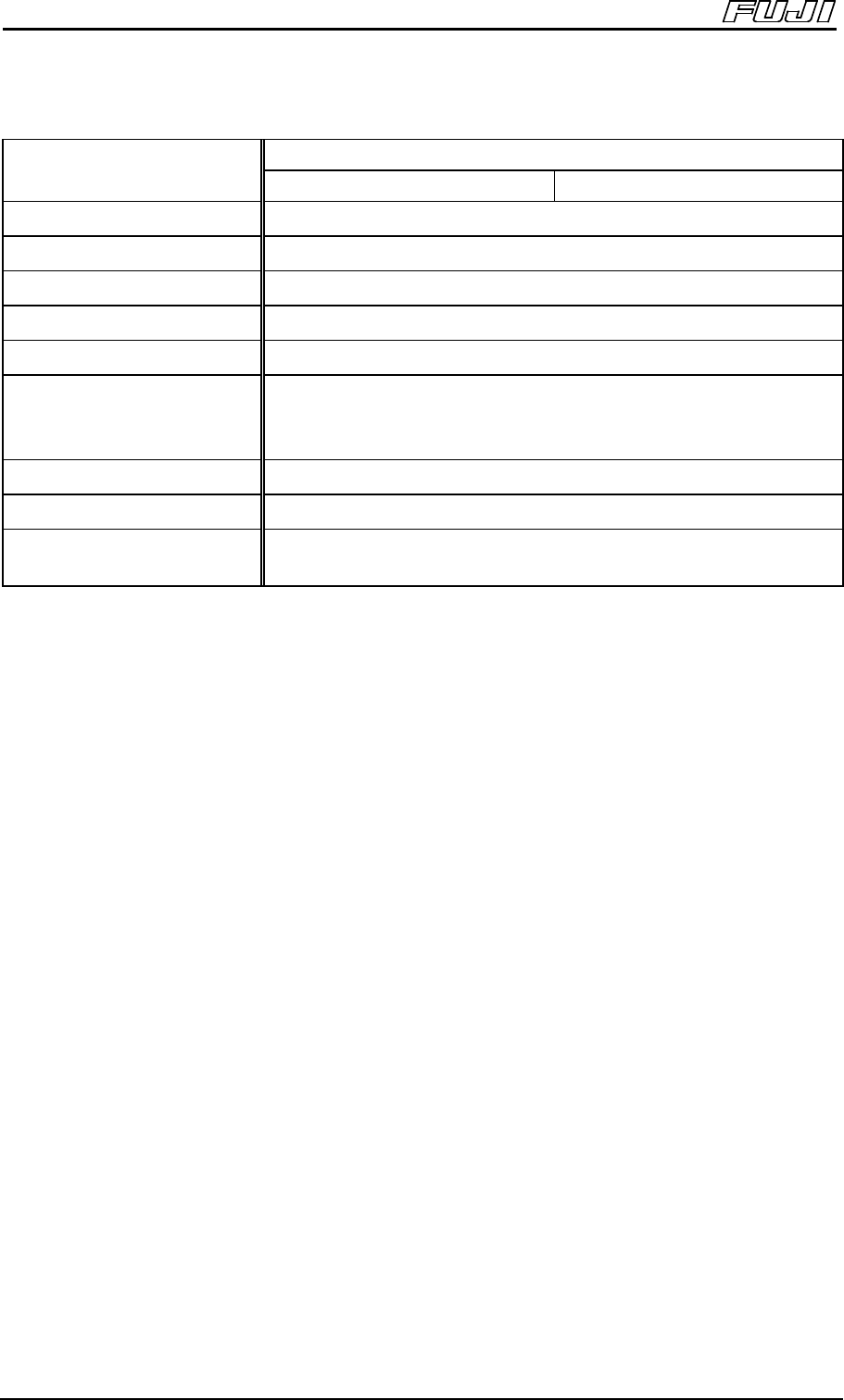
1)规 格
相机类型
功 能
S_Narrow
※1
支持0402
Narrow Wide
元件尺寸(mm) 0402~(2012)etc 0603~3216 etc 2012~
□
19
※2
光 源
前 光
背 光
※1:选项(和Narrow相机的镜头交换,研制中)
※2:使用背光时至
□
14mm为止。
2)关于CSP的合适尺寸
项 目
Narrow Wide
最大尺寸 (mm)
确认中 19×19
最小锡球间距 (mm)
确认中
0.5
最小锡球直径 (mm)
确认中
0.3
最小锡球间隔 (mm)
确认中
0.2
元件方向确认功能 可能
※1
可能
※1
※1:锡球为非点对称排列时,可将所有锡球以要素数据输入,且锡球查出极限
可为100%。在判断出存在有供给方向和正确方向不一致时,会出现影像处
理错误,以防止误贴装。
※2:可识别锡球的脱落,但是锡球的损坏,变形除外。
※3:元件左右上下的最外列必须要有3个以上的等间距锡球排列。
※4:有关上述规格以外的元件请和本公司联系。此外,对于因为覆盖层等而使
元件主体外周处高起的CSP等,存在不能对外周处进行明亮摄影的可能性,
请和本公司联系。
5.
5. 5.
5. 控
控控
控
制
制制
制
- 9 -
CP842
CP842CP842
CP842-
--
-010405R
010405R010405R
010405R_S
_S_S
_S
5
55
5.1
.1.1
.1 控
控控
控
制
制制
制
规 格
项 目
CP-842E CP-842ME
加速度控制(XY平台) Uhi,Hi,Mid,Low,Ulow(可以分5阶段进行加减速设定)
控制轴数 全12轴(CAM,X,Y,Z,D1,D2,Pθ,Fθ,Rθ,NC,NZ,NY)
CPU
Pentium
®※1
型
最大输入顺序数 5,000顺序/1电路板
最大程序保存数 无限制
※2
输入数据方式
※3
(最小单位)
Fuji Flexa
X,Y,Z轴 0.01mm
θ轴 0.01°
通讯功能 网络对应
※4
(以太网)
操作面板 触摸式屏幕
视觉认识补正
电路板位置偏差
元件吸取偏差
※1:Pentium
®
是 Intel Corporation 的注册商标。
※2:硬盘的容量内。
※3:数据通讯通过 Fuji Flexa 进行。
使用Fuji Flexa时,安装软件用的PC以及该软件为必要。安装软件用的PC请用户在机器到达前事
先准备好。
※4:请用户在机器到达前,事先准备好通讯用的以太网连线。
(10BASE-T cable category5 100m以内)