AIM 标准规格书 CNT-AIM-02T.pdf - 第8页
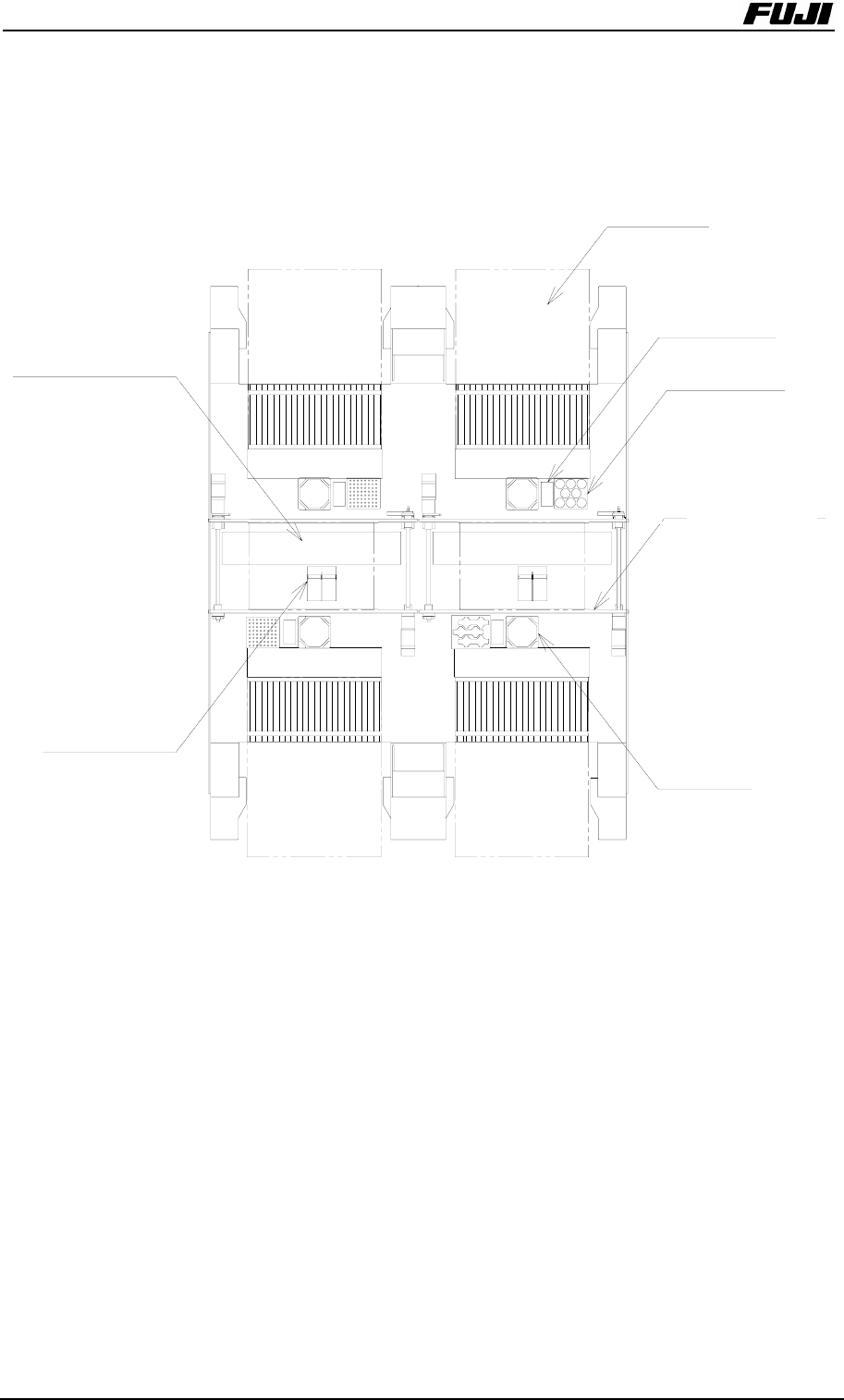
4.結 構 - 6 - AIM-020602R_T 4.1 機器結構 配備有 2 台模組 4 個供料平臺,以及 2 組 XY 機械手。 St a g e 2 1 St a g e 1 1 St a g e 1 2 St a g e 2 2 部品廃棄 ボ ッ ク ス (4 ス テ ー ジ ) デバ イ ス 部 メインコン ベア (計 4s e ts ) (計 4s e ts ) (計 4s e ts ) ノズルチ ェ ンジ ャ ( 2 モ…
3.規 格
- 5 -
AIM-020602R_T
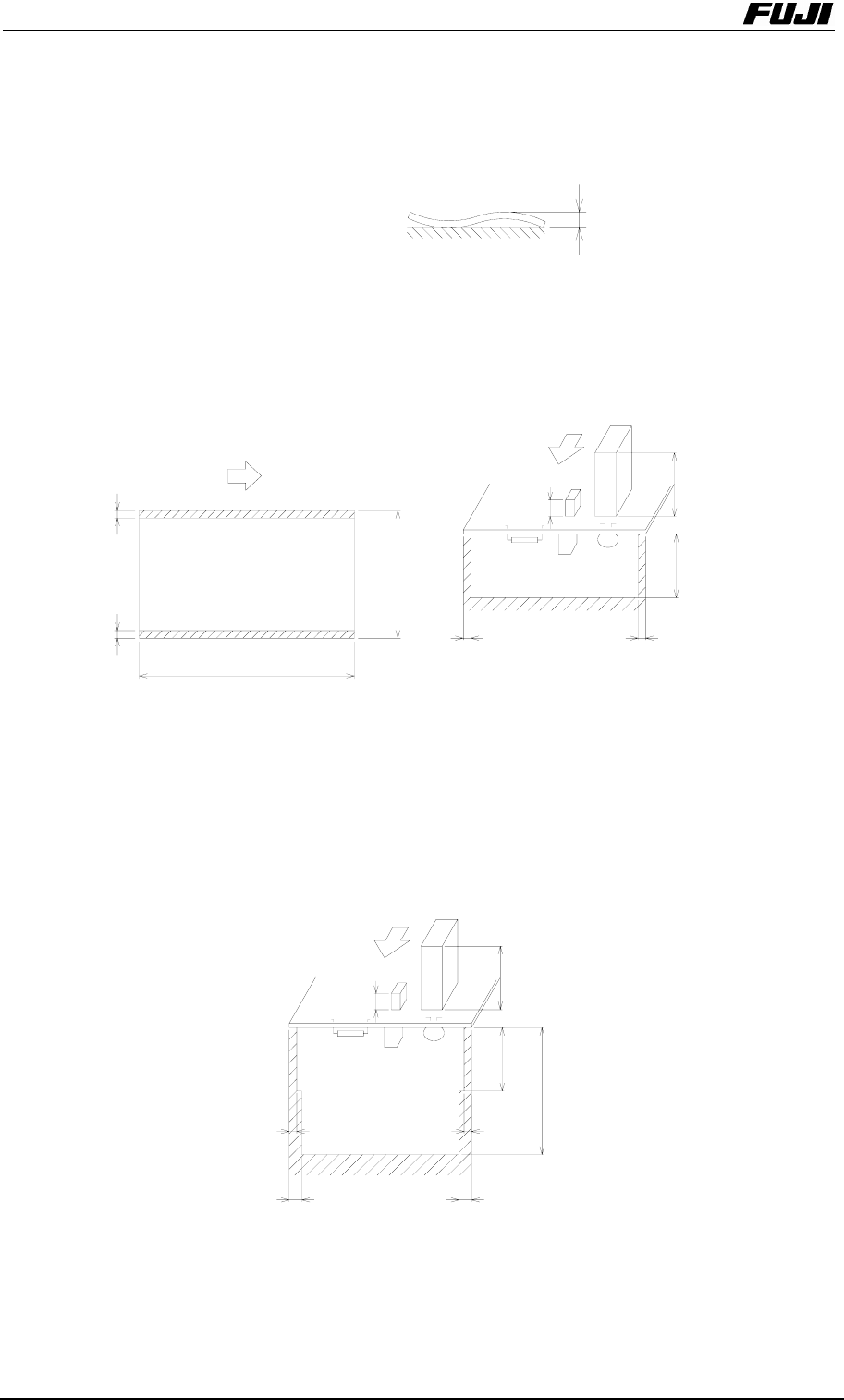
3.2 對象基板的限制
1) 彎曲
MAX 2.0mm以內
2
2) 先置件
<使用支撐銷時>
先置件的高度 參照[5.1 置件工作頭]
MAX 6 . 5
33
25 .4
MAX 2 5 . 4
L
W
3 3
基板端面 基板下
※所需夾緊側的無效區域是從基板的端面開始3mm的平面。
<未使用支撐銷時>
反面先置件的高度 MAX 50.8mm
MAX 6 . 5
5
5
50 .8
33
25 .4
MAX 2 5 . 4
基板下
4.結 構
- 6 -
AIM-020602R_T
4.1 機器結構
配備有2台模組4個供料平臺,以及2組XY機械手。
Stage21
Stage11
Stage12 Stage22
部品廃棄 ボ ッ ク ス
(4ステージ )
デバ イス部
メインコンベア
(計
4sets
)
(計
4se ts
)
(計
4se ts
)
ノズルチ ェンジ ャ
( 2 モ ジ ュ ー ル独立駆動 )
パーツ カ メ ラ
(1ロボ ット2ヘッド )
(2モジュール独立駆動 )
装着 ヘ ッ ド
XYロボット
置件工作頭
1個機械手2個工作頭
X
Y
機械手
料站部
2模組獨立驅動
4個供料平臺
零件廢棄箱
共4套
吸嘴更換器
共4套
主搬運軌道
2模組獨立驅動
零件相機
共4套
5.單 元
- 7 -
AIM-020602R_T
5.1 置件工作頭
置件工作頭的1個機械手可以搭載2個工作頭,根據對象零件,可以從適合置件的
置件工作頭中選擇2個進行搭載。由於可以進行對應於生產形態的自由更換,所以
可以根據生產量組成最佳的模組配置。
相同工作頭的組合可以使生產能力提高,不同工作頭的組合可以使對應的對象零件
的尺寸範圍擴大。
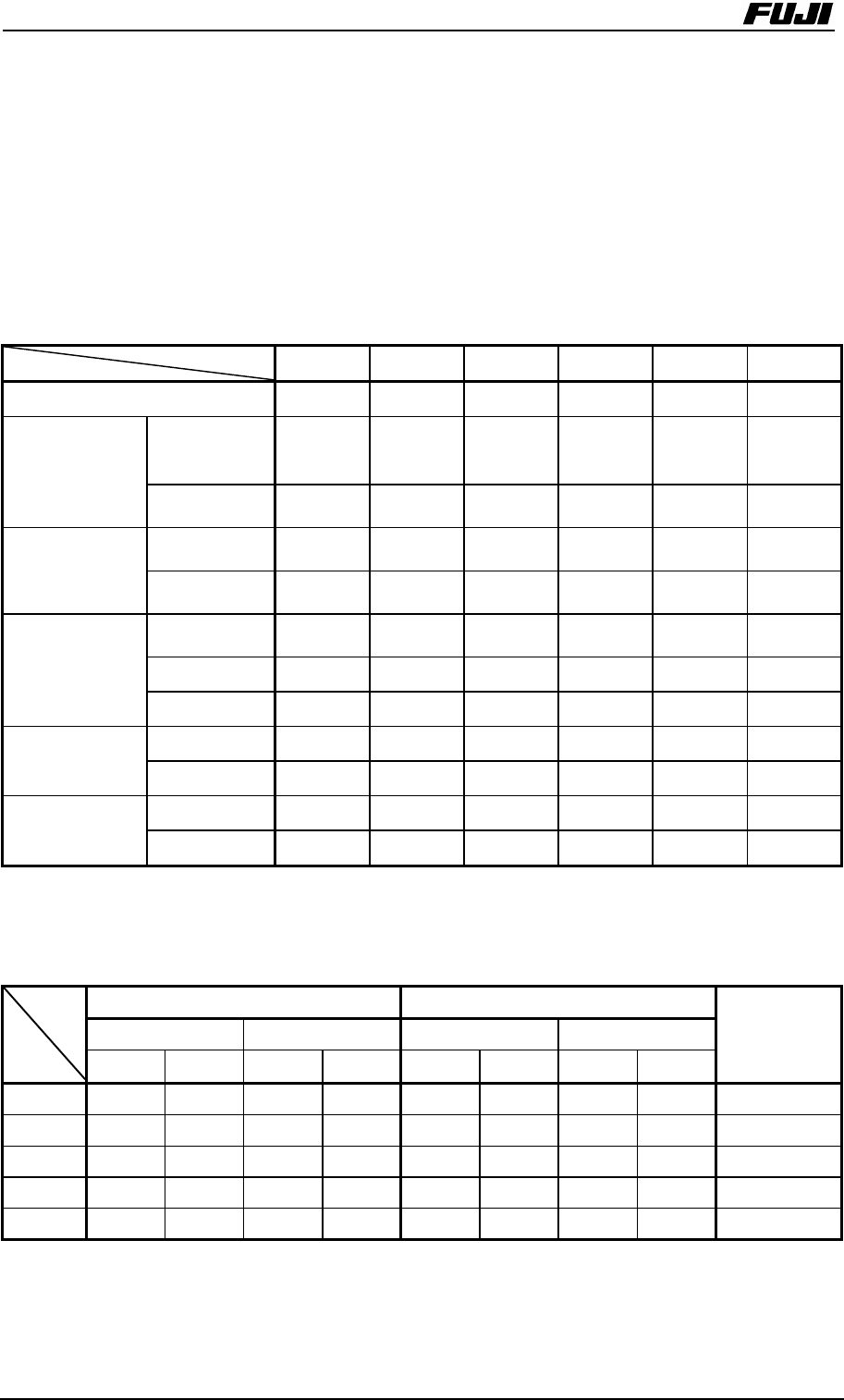
模組的配置從表的組合(工作頭類型)中選擇2種進行搭載。
項目 工作頭類型
H08+H08 H08+H04 H08+H01 H04+H04 H01+H04 H01+H01
生產能力 (cph)
10,500 9,400 9,400 6,200 5,600 4,300
L×W
(mm)
0603~
7.5×7.5
0603~
38×38
0603~
38×38
1608~
38×38
1608~
74×74
※
1
(32×180)
1608~
74×74
(32×180)
對象零件尺寸
高度
(mm)
6.5 9.0 9.0 9.5
10.0
※
1
25.4
置件面
(mm)
6.5 6.5 6.5 9.5 9.5 25.4
先置件高度
反面
(mm)
25.4 25.4 25.4 25.4 25.4 25.4
料帶
(mm)
8~12 8~56 8~88 8~56 8~88 8~88
料管 × ○ ○ ○ ○ ○
零件供應形態
料盤 × ○ ○ ○ ○ ○
STAGE11/21 F F F F F F
料站
※
2
STAGE12/22 F F F , TL F F , TL F , TL
機械夾具 × × ○ × ○ ○
選項
加壓力置件 × × ○ × ○ ○
※1.如果置件1. 38mm×38mm的零件時,對象零件高度到20.0mm為止。
※2. F:Feeder TL:TrayUnit-L
【配置舉例】
模組1 模組2
HEAD STAGE HEAD STAGE
生產能力
配置例
1 2 11 12 1 2 21 22 (cph)
1 H08 H08 F F H08 H08 F F 21,000
2 H08 H08 F F H01 H04 F TL 16,100
3 H08 H08 F F H01 H01 F TL 14,800
4 H08 H04 F F H01 H04 F TL 15,000
5 H01 H01 F TL H01 H01 F TL 8,600
※F:Feeder TL:TrayUnit-L
※以上組合僅為舉例(搬運方向:左→右),實際使用中不局限於此。但是,不能應用在置件了
[H01+H01/H08+H04]或[H01+H01/H08+H08]等大零件後,再置件的組合。