G5《安装调试及使用说明书》.pdf - 第22页
凯格精密机械有限公司 - 22 - 第四章 操作系统说 明 2. 此时在光标提示符下正确地输入您的密码, 单击 “确认” 即可进入 [ 参数设置 1] 对话框, 如图 4 – 16 所示;单击“取消”仍回到主窗口画面。 3. 在 [ 参数设置 1] 对话框中可进行“ PCB 设置” 、 “钢网设置” 、 “运输设定” 、 “控制方式” (系统 默认 为自动) 、 “印 刷设 置” 、 “脱 模设置” 、 “ 清洗 设置” 、 “取 像设…
凯格精密机械有限公司
- 21 -
第四章 操作系统说明
4.2.2.2 打开工程
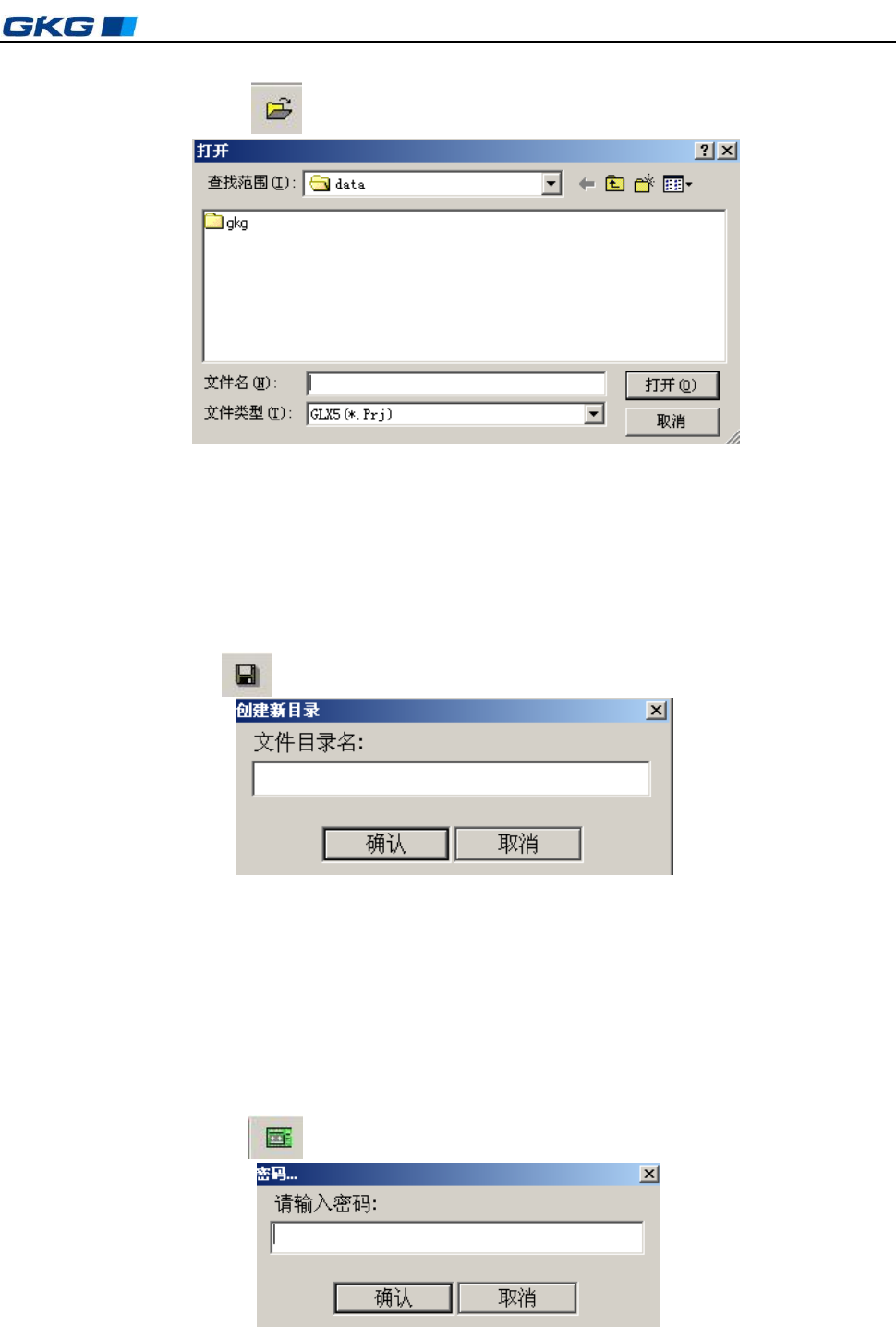
1. 单击工具栏 1 上“ 打开 ”按钮,显示“打开”对话框,如图 4–13 所示。
图 4-13 文件〈打开〉对话框
2. 用鼠标选择所要的文件夹位置和其中的 Pri 文件类型。
3. 单击对话框中的[打开]按钮,打开文件;单击[取消]按钮,退回到主窗口。
4.2.2.3 保存工程
其作用是保存印刷机印刷参数设置文件,以便下次操作时调用。操作步骤如下:
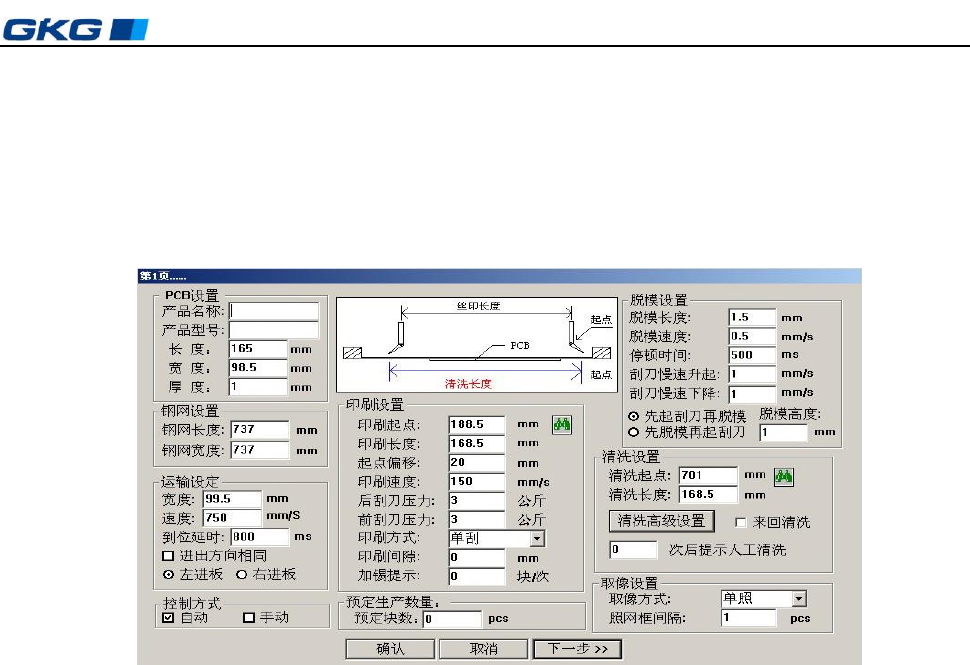
1. 单击工具栏上“另存 ”按钮,显示“创建新目录”对话框,如图 4–14 所示。
图 4-14 〈创建新目录〉对话框
2. 用鼠标点击滚动条,选择要存放的文件位置和文件类型。
3. 在“文件名”栏目中键入要存放的文件名。
4. 单击对话框中的[保存]按钮,保存文件;单击[取消]按钮,退回到主窗口。
4.2.2.4 数据录入
其作用是设定或修改 PCB 参数设置及刮刀压力、运输、印刷、清洗等参数,操作如下:
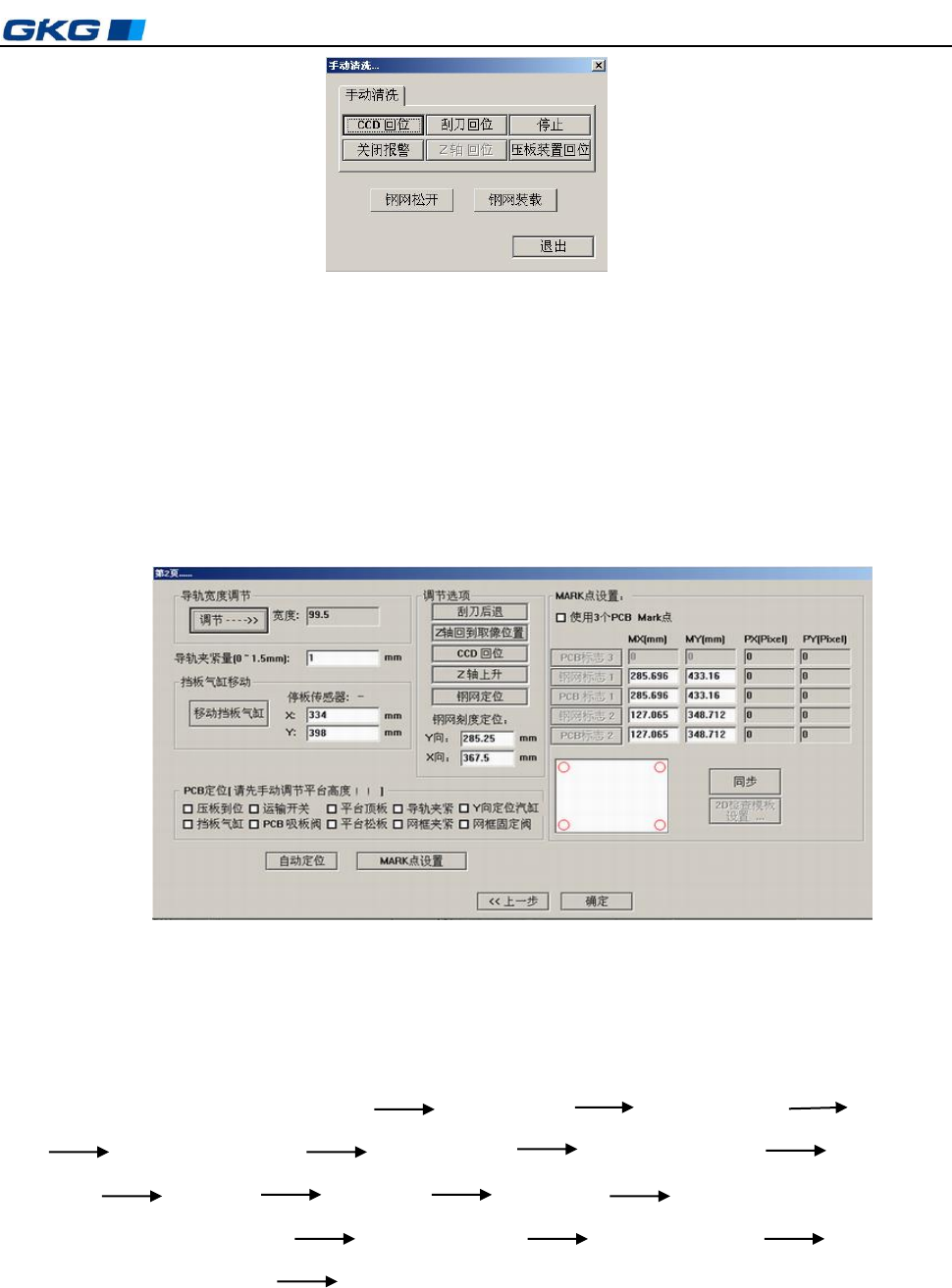
1. 单击工具栏 1 中“ ”按钮,此时出现“密码输入”对话框。如图 4–15 所示:
图 4-15 〈密码输入〉对话框
凯格精密机械有限公司
- 22 -
第四章 操作系统说明
2. 此时在光标提示符下正确地输入您的密码,单击“确认”即可进入[参数设置 1]对话框,
如图 4–16 所示;单击“取消”仍回到主窗口画面。
3. 在[参数设置 1]对话框中可进行“PCB 设置”、“钢网设置”、“运输设定”、“控制方式”
(系统默认为自动)、“印刷设置”、“脱模设置”、“清洗设置”、“取像设置”、“预定生
产数量”设置等参数的设定。
图 4-16 〈参数设置 1〉
说明:
只要将 PCB 参数设置好后,图中的“印刷起点”、“印刷长度”“清洗起点”“清洗
长度”数值自动生成,用户也可以根据生产的实际情况进行修改;输入数值应大于
PCB 板的宽度。在[参数设置 1]中输入 PCB 板的长、宽、厚参数后,则运输宽度无
需设定,自动显示为“PCB 板宽+1”。
在进行参数设置时,如所输入的数值超出机器设置范围,屏幕会显示“输入超出范
围”的错误提示,并告诉你所输入参数的机器设置范围。
可设置刮刀压力、刮刀速度、选择单刮或双刮及刮刀的运行方向;可选择行动的“人
工清洗方式”;可设置标志点图标类型和脱模方式。
可设置视觉校正的取象方式——双照或只第一次双照;还可对印刷精度进行设置。
脱模设置可根具产品不同进行数据设置以达到更好的产品质量。
控制方式默认为自动,可更具需要改变为手动或自动。如在此对话框中选择手动的
“手动清洗”方式,在正常生产过程中,机器会按此对话框中所输入的“清洗间隔”
参数生产完一定数量的产品后自动停下,并出现“人工清洗”对话框,如图 4–17
所示,等待人工清洗网板,步骤如下:
凯格精密机械有限公司
- 23 -
第四章 操作系统说明
图 4-17〈手动清洗〉对话框
在“手动清洗”对话框中单击“打开门开关”按钮,将机器前罩门打开,并单击
“CCD 回位”按钮,使 CCD 部分回到原点位置。
此时可将手伸到网板下进行人工手动清洗网板。
4. 在以上参数设置好以后,单击“确认”回到主窗口画面;单击“取消”,取消以上设置,
机器仍为前次[参数设置 1]中的参数,并回到主窗口画面。
5. 选择[ 下一步>>]将进入[参数设置 2]对话框。如图 4–18 所示:
图 4-18 〈参数设置 2〉对话框
在[参数设置]的[第 2 页]对话框中可进行“导轨宽度调节”、“挡板气缸移动”、“刮刀后退”、
“Z 轴回到取像位置”、“CCD 回位”、“ Z 轴上升”、“钢网定位”等参数调节。
PCB 定位调试的操作程序
首行要确认 PCB 顶升平台高度 移动挡板气缸 打开停板气缸 打开运输
开关 PCB从入口处进板 关闭运输开关 打开 PCB吸板阀 关闭停板气
缸(收回) 平台顶板 导轨夹紧 CCD 回位 打开 Z 轴上升手调网框(使
网板位置与 PCB 焊盘对齐) 打开网框固定阀 打开网框夹紧阀 关闭 Z 轴上
升(Z 轴下降至取像位置) 点击[<<上一步]开关,PCB 松板退出[数据录入 2]菜单。
注意:点击“Z 轴上升”按钮,使 PCB 支撑块处入顶板位置,手动将 PCB 放于支撑块上,
确认 PCB 板上表面是否与导轨两中间压板表面平齐。
6. 单击右下角[自动定位]对话按钮即可进入 PCB 的 MARK 定位设置,如图 4–19 所示: