G5《安装调试及使用说明书》.pdf - 第24页
凯格精密机械有限公司 - 24 - 第四章 操作系统说 明 第四章 操作系统说 明 图 4-19 〈 PCB 定位〉对话框 7. [PCB 标志点采集 ] 进行 PCB 标志点采集,单击 [Z 轴回到取像位置 ] 对话框,使工作台运动到取像位置,此 时再单击 [MARK 点设置 ] 按钮,则可对 Mark 点设置,如图 4- 20 。 图 4- 20 < 标志点采集 > 对话框 在 [ 标志点采集 ] 对话框中 ,通过调…
凯格精密机械有限公司
- 23 -
第四章 操作系统说明
图 4-17〈手动清洗〉对话框
在“手动清洗”对话框中单击“打开门开关”按钮,将机器前罩门打开,并单击
“CCD 回位”按钮,使 CCD 部分回到原点位置。
此时可将手伸到网板下进行人工手动清洗网板。
4. 在以上参数设置好以后,单击“确认”回到主窗口画面;单击“取消”,取消以上设置,
机器仍为前次[参数设置 1]中的参数,并回到主窗口画面。
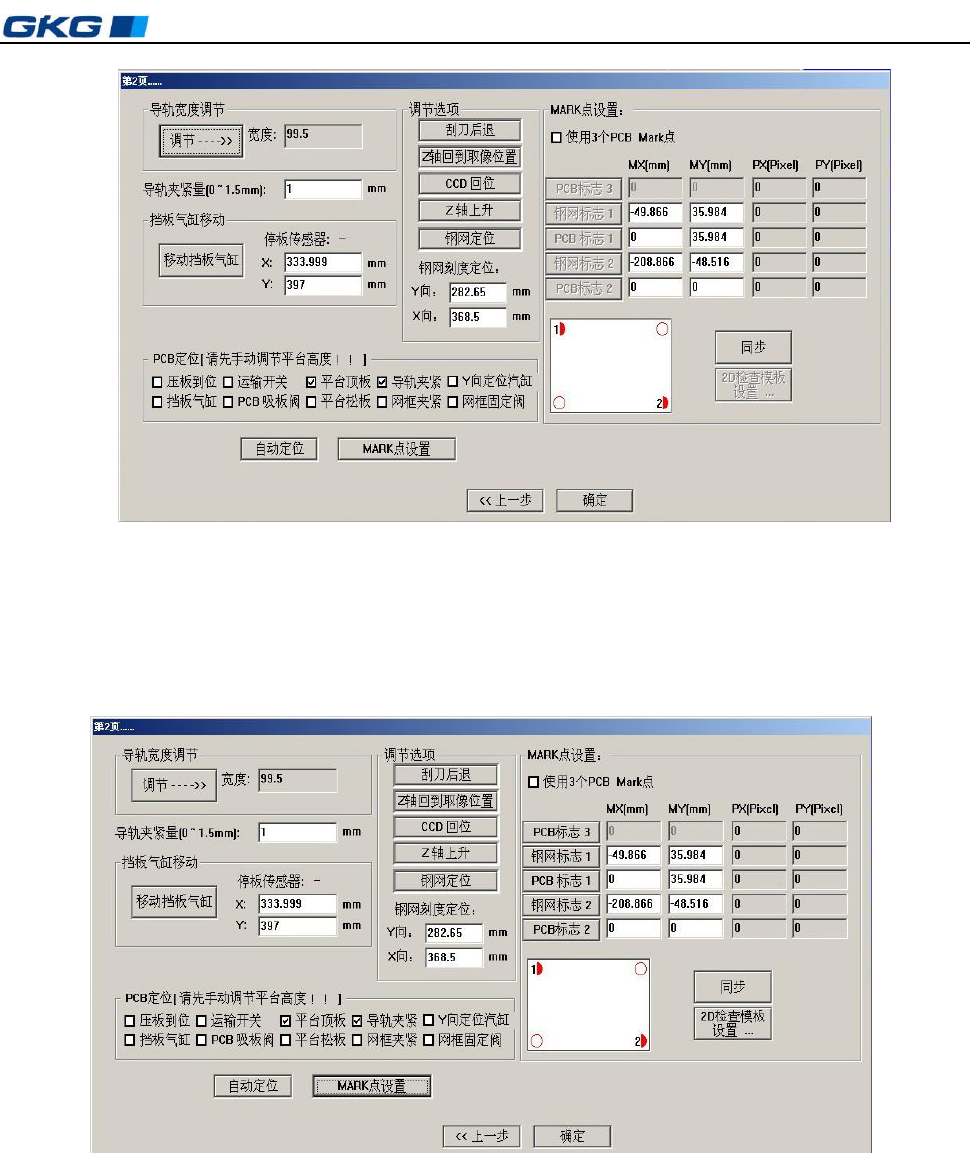
5. 选择[ 下一步>>]将进入[参数设置 2]对话框。如图 4–18 所示:
图 4-18 〈参数设置 2〉对话框
在[参数设置]的[第 2 页]对话框中可进行“导轨宽度调节”、“挡板气缸移动”、“刮刀后退”、
“Z 轴回到取像位置”、“CCD 回位”、“ Z 轴上升”、“钢网定位”等参数调节。
PCB 定位调试的操作程序
首行要确认 PCB 顶升平台高度 移动挡板气缸 打开停板气缸 打开运输
开关 PCB从入口处进板 关闭运输开关 打开 PCB吸板阀 关闭停板气
缸(收回) 平台顶板 导轨夹紧 CCD 回位 打开 Z 轴上升手调网框(使
网板位置与 PCB 焊盘对齐) 打开网框固定阀 打开网框夹紧阀 关闭 Z 轴上
升(Z 轴下降至取像位置) 点击[<<上一步]开关,PCB 松板退出[数据录入 2]菜单。
注意:点击“Z 轴上升”按钮,使 PCB 支撑块处入顶板位置,手动将 PCB 放于支撑块上,
确认 PCB 板上表面是否与导轨两中间压板表面平齐。
6. 单击右下角[自动定位]对话按钮即可进入 PCB 的 MARK 定位设置,如图 4–19 所示:
凯格精密机械有限公司
- 24 -
第四章 操作系统说明
第四章 操作系统说明
图 4-19〈PCB 定位〉对话框
7. [PCB 标志点采集]
进行 PCB 标志点采集,单击[Z 轴回到取像位置]对话框,使工作台运动到取像位置,此
时再单击[MARK 点设置]按钮,则可对 Mark 点设置,如图 4-20。
图 4-20<标志点采集> 对话框
在[标志点采集]对话框中,通过调用图像处理功能及标志点位置选择的辅助功能使
PCB 板和 Stencil 网板对得更准。
单击[钢网标志 1]——出现[模板定制]对话框,如图 4–21 所示。
凯格精密机械有限公司
- 25 -
第四章 操作系统说明
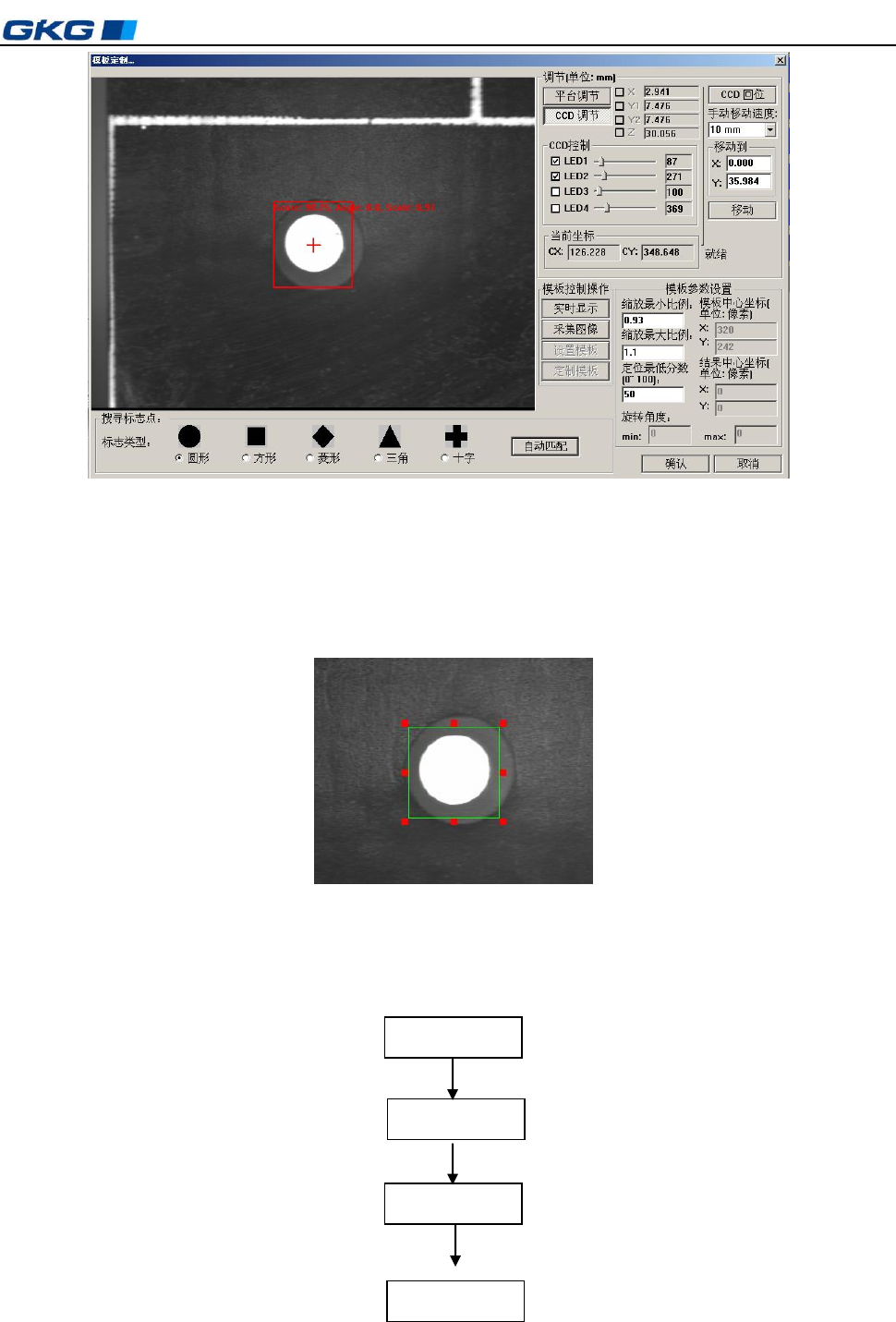
图 4-21〈寻找标志点〉对话框
单击图 4-20 对话框中的[移动],然后根据对话框中〈手动移动速度的设置〉用手移动键
盘上的箭头键(←↑→↓)或用鼠标移动,待寻找到标志图像后——再单击[自动匹配]将图象
定位(即用红色方框将标志点图像包容)。如图 4–22 所示:
图 4-22 标志点图像
在图 4-19 “模板定制”栏中,连续单击以下方框按键确认,然后单击[确认]键,返回
<标志点采集> 对话框。如图 4–23 所示。
图 4–23
实 时 显 示
采 集 图 像
显 示
设 置 模 板
定 制 模 板