1_赫立AOI中文客户培训教材.pdf - 第33页
注意:当 测试 极板 时 ,模 板匹配 (RG B) 算法需在 “双向搜索 ”打 钩 , 当元件真正极 反 时 , 绿 色 定位框会扭 转 180 度去 搜索模板 图 像, 计 算出角度 变 化,在相 对 偏移 值设 置 角度限制即 可 算法:模板匹配( RGB ) 除了定位, 该 算法可用于极性的 检测 ,有些元件的极性点 标 志不 太明 显 (如右 图 ),可用模板匹配( RGB )加相 对 偏移 值 算法的 组 合 对 极 性 测…
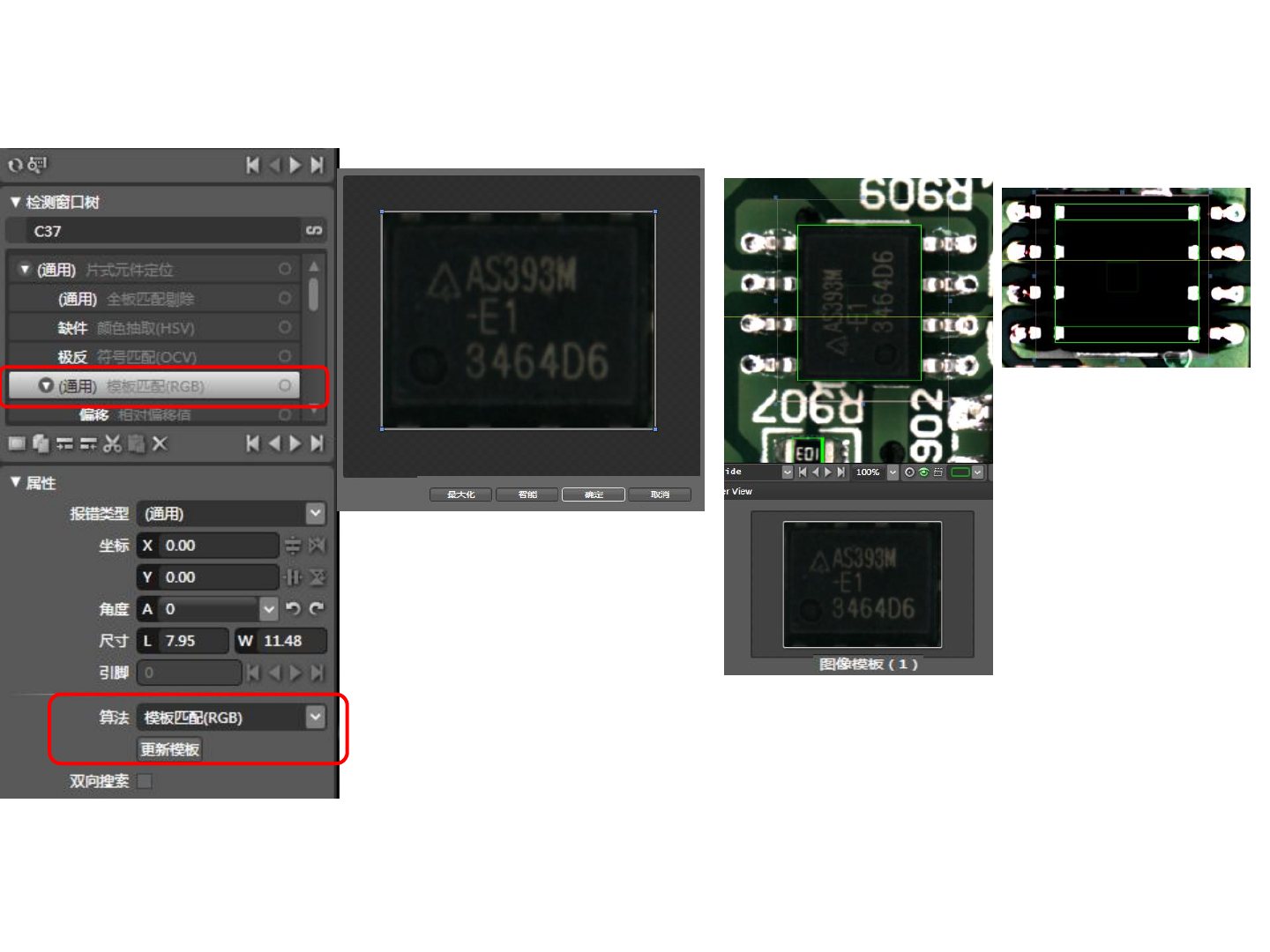
更新模板选择截取需要定位的图像
另一种定位方式:
片式元件定位
基于模板图像搜索定位
算法:模板匹配(RGB)
在检测窗口指定的区域内,自动搜索与预先采样的彩色模板最为相似的图像,并计算出
相似程度百分比,主要用于各种定位
当我们无法找到合适的光源使用片式元件定位算法定位时,我们
可以使用此算法进行定位,编程中首选算法片式元件定位用于定位

注意:当测试极板时,模板匹配(RGB)算法需在“双向搜索”打钩,
当元件真正极反时,绿色定位框会扭转180度去搜索模板图像,
计算出角度变化,在相对偏移值设置角度限制即可
算法:模板匹配(RGB)
除了定位,该算法可用于极性的检测,有些元件的极性点标志不
太明显(如右图),可用模板匹配(RGB)加相对偏移值算法的组合对极
性测试
设置角度限制<90度
料号右键旋转180度模拟
180>7 极性报警

选择两种追踪模式的效果
选择一种黑白分明效果的光源,选择方
向和追踪模式找到自己想精准定位的位置
不要选“任意”
选择长方向,短方向的效果
有何变化???
准确
偏移
窗口偏移
使用单边定位后
算法:亮度梯度单边定位
在检测窗口指定的区域内,在指定的方向(长或短方向),自动追踪获取指定方式(亮到暗,或暗到亮)
的最大明暗变化的单条边界。用于更准确的找到测试点位置做的细致定位
有时候我们定位本体的时候受部分干扰可能导致窗口引脚两边
的位置不太对称,只能兼顾一边,此时可通过亮度梯度单边定位重
新搜索位置精准定位,以致后面的检测窗口稳定的落在测试位置上
你还能觉得它有何用处呢?
准确
准确