AIM 机械手册QD053-04.pdf - 第253页
QD053-04 9. 传感器的调整 AIM 机械手册 235 9.1.3 PAM 操作流程 PAM 测定按各个工作头执行。在 AIM 上,一次可以测定两侧 (平台 1 和平台 2) 。一共搭载 2 工作头 / 模组合计 4 个工作头,对于一台有必要测定 4 次。 PAM 测定时,清除模 组的精度校正数据,请在执行精度 校正的重新测定后进行 PA M。 在确认已经进行了 PAM 精度校正的机器的精度时, 请不要 删除相应的工作头的最终修…
9. 传感器的调整 QD053-04
234 AIM 机械手册
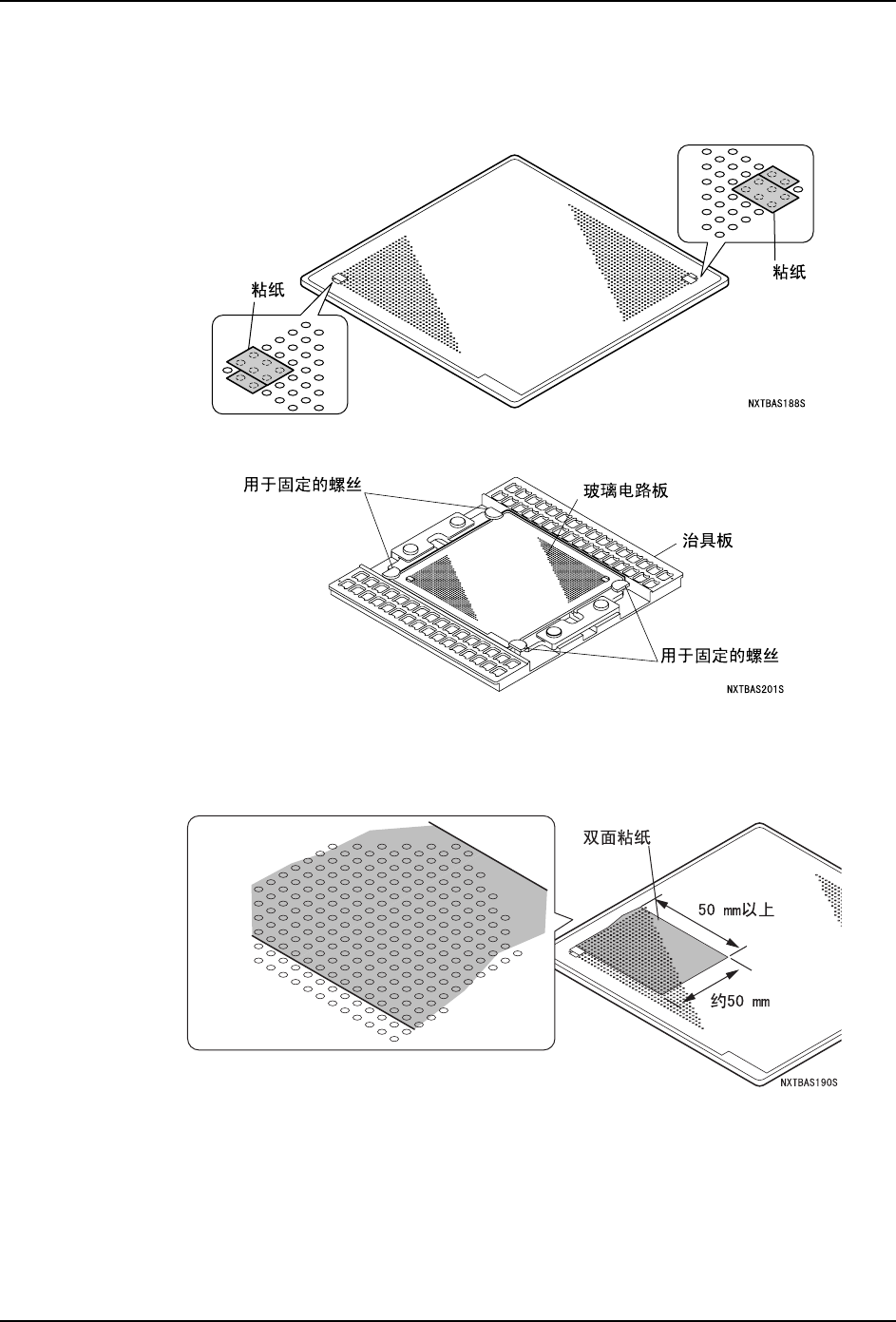
8 吸嘴工作头、12S 吸嘴工作头测定时
1. 请将与右上,左下的角落的定位点相邻的 2 列的定位点用粘纸覆盖住。这是为了防止错
误读取在角落的定位点。覆盖的粘纸请贴在玻璃电路板的定位点印刷面。
2. 请将玻璃电路板的定位点印刷面向上安装在治具板上用 4 个螺丝固定。
3. 请在玻璃电路板上用双面粘纸 (约 50mm 宽,长 50mm 以上)粘贴。此时,请注意在右上
和左下角落的定位点上,不要粘贴双面粘纸。
备注 ) 请确认在玻璃电路板和双面粘纸之间是否有气泡和异物。
4. 将 1005 白色元件安装在 8mm 供料器上,将送料间距对准 2mm。请将这个供料器安装在执
行 PAM 的模组的料站上。
QD053-04 9. 传感器的调整
AIM 机械手册 235
9.1.3 PAM 操作流程
PAM 测定按各个工作头执行。在 AIM 上,一次可以测定两侧 (平台 1 和平台 2)。一共搭载
2 工作头 / 模组合计 4 个工作头,对于一台有必要测定 4 次。
PAM 测定时,清除模组的精度校正数据,请在执行精度校正的重新测定后进行 PAM。
在确认已经进行了 PAM 精度校正的机器的精度时,请不要删除相应的工作头的最终修正值文
件进行 PAM。只有在贴装精度不是很好的情况下,才删除最终修正值文件执行 PAM。
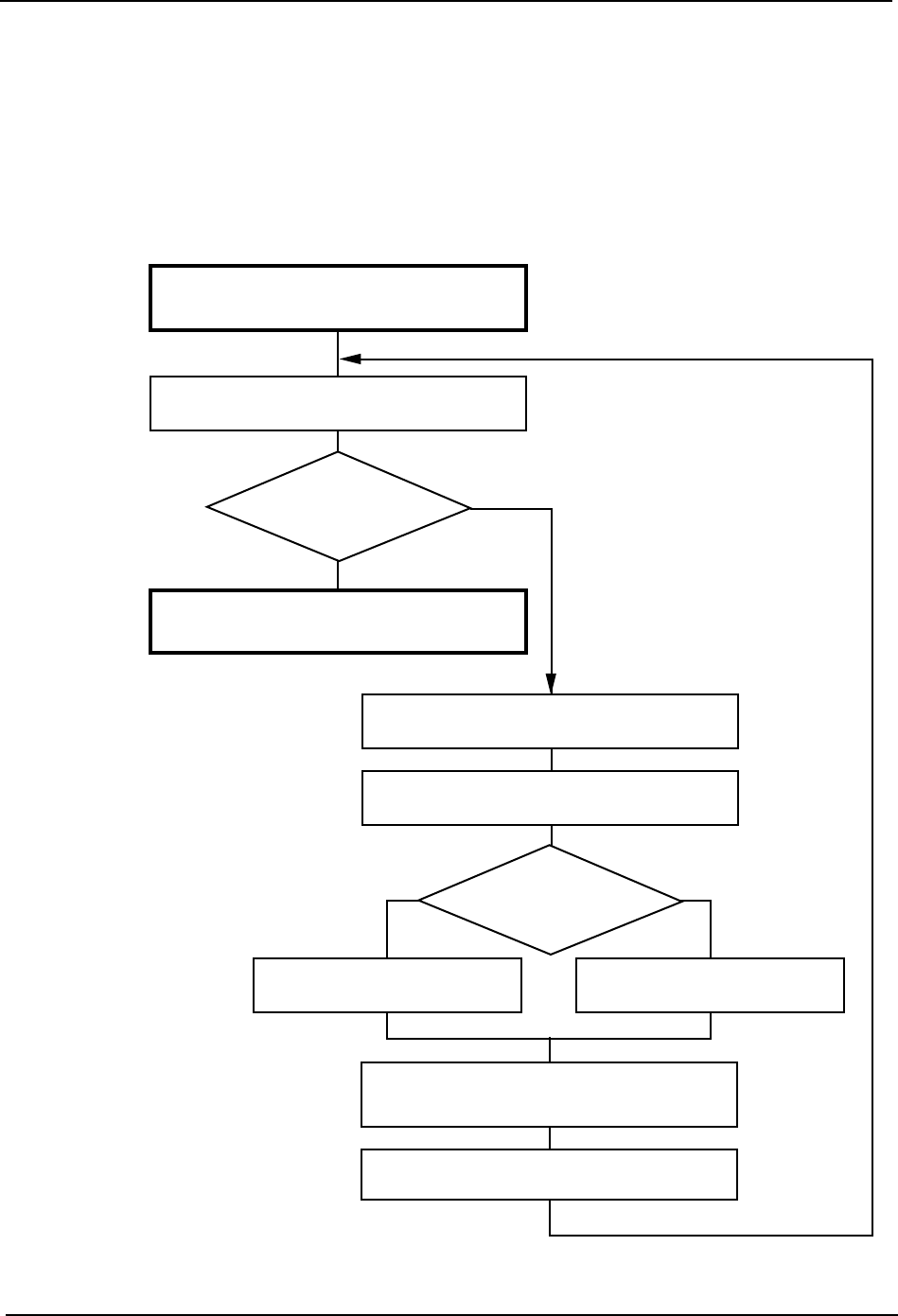
䆒ᅮЎ3$0ᓣ
䖯㸠3$0⌟ᅮ
㒧ᵰᰃ৺2.
"
<HV
1R
㧔䞡ᮄ䖯㸠3$0⌟ᅮ㧕
পᕫ㸹ℷؐ᭛ӊ
পᕫ⌟ᅮ㒧ᵰ᭄
䖤ㅫ⌟ᅮ㒧ᵰ᭄
3$0⌟ᅮᰃ
"
佪 Ѡҹৢ
⫼
ޟᬒܹϔञ᭛ӊޠˈ䕧ߎ
㸹ℷؐ᭛ӊ
⫼ޟᬒܹܼ䚼᭛ӊޠˈ䕧ߎ
㸹ℷؐ᭛ӊ
㾷䰸3$0ᓣ
䕧ߎѠ䖯ࠊ᭛ӊ᭛ᴀ᭛ӊ
ᇚѠ䖯ࠊ᭛ӊӴ䗕ǃডࠄᴎ఼Ϟ
1;73$06
9. 传感器的调整 QD053-04
236 AIM 机械手册
9.1.4 PAM 模式设定
在机上执行 PAM 时,有必要将机器设定为 PAM 模式。在设定 PAM 模式前,请进行以下事项的
确认。
a. 在通常模式的状态下,生产 Job 传送给机器。
b. 将所有工作头的吸嘴返回到吸嘴平台上。如果没有返回的话,请用吸嘴平台更换指令
执行此项。
另外,设定为 PAM 模式并从 PAM 模式恢复到生产运转时,Job 从机器上被删除。
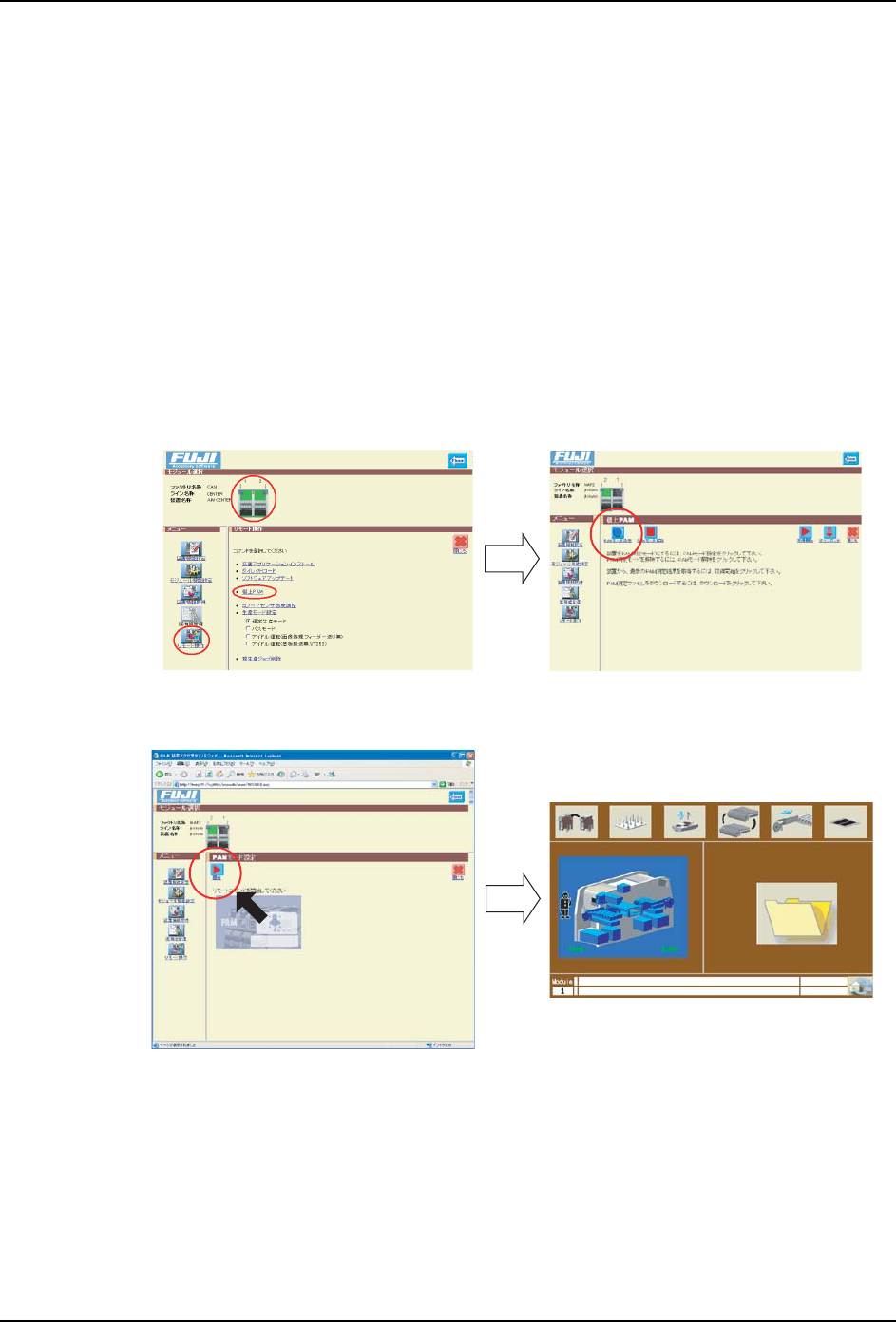
备注 ) 关于在此说明的附加软件的操作方法,请参考「FUJI 附加软件操作手册」(在线手册)的「机
上 PAM 测定」一项。
1. 在附加软件的机器设定画面上,选择执行 PAM 的模组,单击 「远程操作」。
2. 请选择 「机上 PAM」。显示出取得 PAM 结果的画面。
3. 请选择 「PAM 模式设定」。
4. 请选择 「开始」,模式设定结束后,所选择的模式的操作画面变为 PAM 模式。
备注 ) PAM 模式上等待 job 画面的背景色变为褐色。
解除 PAM 模式时,请选择 「远程操作」- 「机上 PAM」- 「解除 PAM 模式」。选择 「开始」-
「返回」时,模组返回通常的运转画面。
AIMPAM001
AIMPAM002