三星 SM421 校正.pdf - 第74页
Samsung Component Placer SM421 Administrator ’ s Guide 4-5. “Conv eyor System-Inl ine S tatus” < > SMEMA Output Input ( -On, -Off) DO-Not Busy (Pre.) �…

Tools
(shortcut)
4-11
4.5.2. Manual Control
<>
Conveyor Station(Entry, Working, Exit)
</>
StopperUp / Down
<Edge Fixer>
StationBelt
]>
<>
Conveyor StationPCB
StationPCB
<>
Shuttle (StationF1, StationF3) (StationF2) (StationR2)
<Rear> : Shuttle
<Front> : Shuttle
<>
<> – Conveyor
Conveyor
<Inline Status…>
In-Line Status, Rail Width, Clear Station, Reset
Menu
Backup Table / Stopper / Fixer
Entry, Working, Exit Staiton BUT, Stopper, EdgeFixer,
<>
< BUT/>
<Current Staion> ‘Working’ Backup Table Up /
Down
<Current Staion> ‘Working’ Edge Fixer
<>
< [N
<Delate>PCBStation
PCBStationPCB
Conveyor
Station

Samsung Component Placer SM421 Administrator’s Guide
4-5. “Conveyor System-Inline Status”
<>
SMEMAOutput Input (-On, -Off)
DO-Not Busy (Pre.)
PCB
<Not Busy>
DI-Available (Pre)
PCB
DI-Not Busy (Next)
PCB
DO-Available (Next)
PCB
<Available>
4-12
Tools
(shortcut)
MMI
4-13
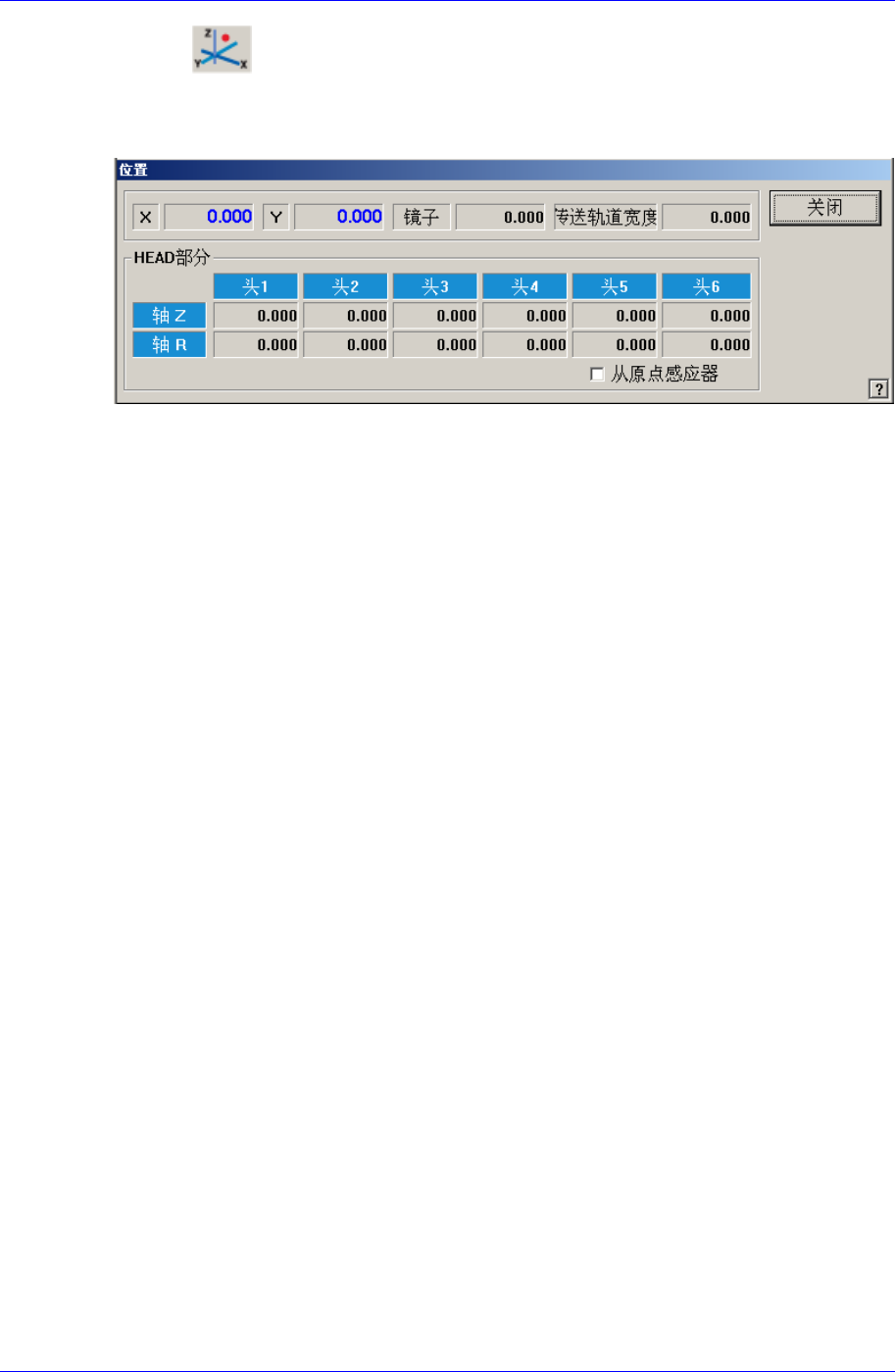
4.6.
4-6. “
”
<>
Gantry
X
1
Y
1 Y
D>
Head 1/Axis Z
<>PCB1
ad 1 xis R
1Thetahome
<>PCB2
Head 2/Axis R
2Thetahome
Head 3/Axis Z
<>PCB3
Head 3/Axis R
1Thetahome
Head 4/Axis Z
<>PCB4
Head 4/Axis R
4Thetahome
X
<HEA
He /A
Head 2/Axis Z