TM5739.憓擖晹昳擣幆傾儖僑儕僘儉愝掕娙曋壔.pdf - 第4页
ヤマハ発動機株式会社 IM 事業部 マウンター技術部 ソフト開発グループ MDO C-SOFT50229 4/11 外形対象物タイプ 白 / 黒 * 「仮 中心基準」が「ボディ」の場合のみ 部品外形が明るい色 の場合は「白」、暗い色の場合は 「黒」を指定します。 外形ノイズカット優先 順 部品内優先 / 部品外優先 * 「仮中心基準」が「ボディ」の場合のみ ノイズカットの…
ヤマハ発動機株式会社IM 事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50229 3/11
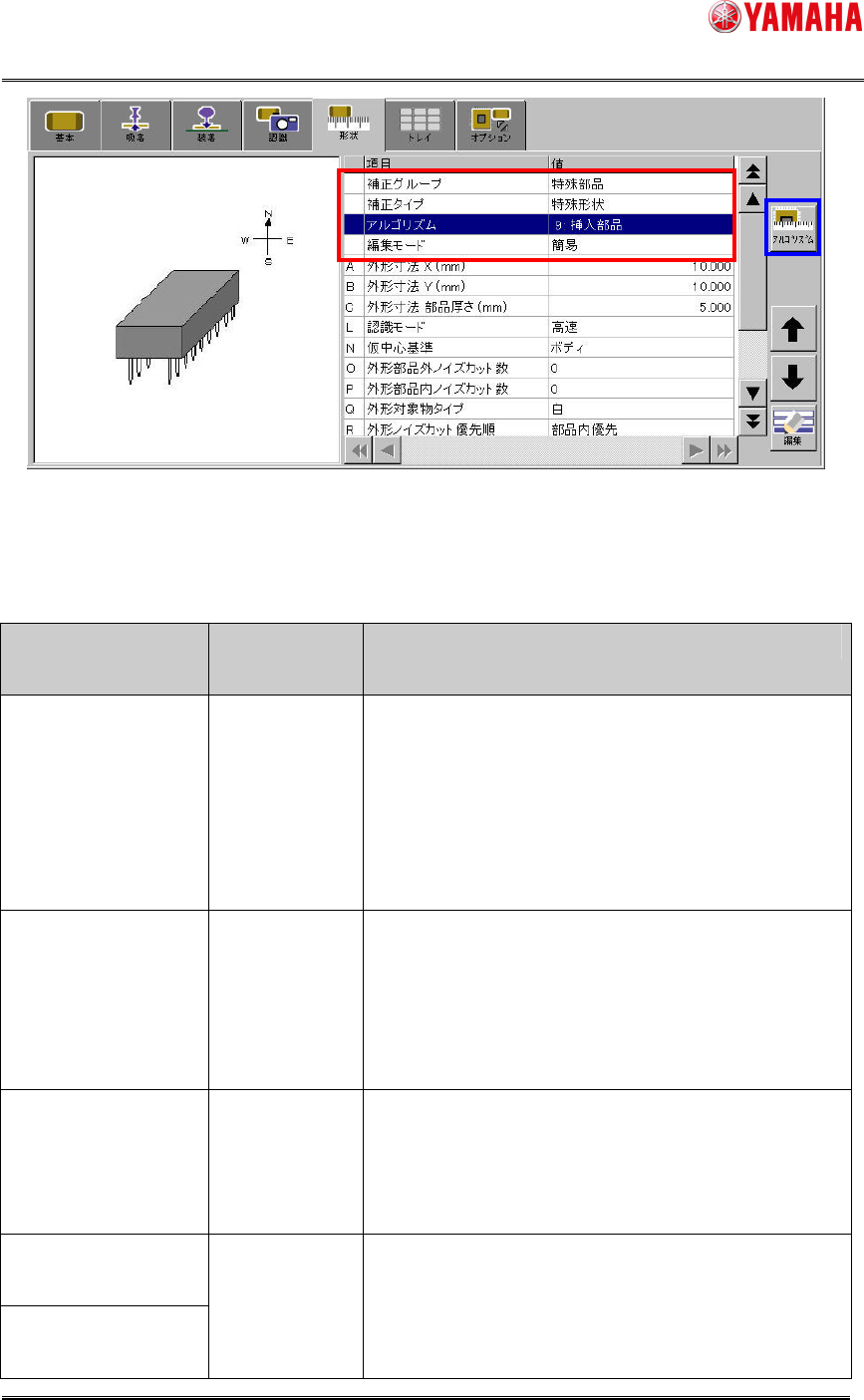
図 1 [部品]–[形状] 画面
(2) 「挿入部品」アルゴリズムの固有パラメータを設定します。(表 2 参照)
表 2 「挿入部品」アルゴリズムの固有パラメータ
項目名
項目名項目名
項目名
値域
値域値域
値域または
またはまたは
または選
選選
選
択項目
択項目択項目
択項目
説明
説明説明
説明
認識モード 高速 / 詳細 「高速」の場合は、ピン先端の定義形状と認識画像が
一致しているかの判定を 2 値画像で行い、「詳細」の
場合はマッチング処理を行います。
ピン先端の明暗がはっきりしている場合は「高速」を、
ピン先端が暗く明暗がはっきりしない場合は「詳細」を
指定します。
ピンマッチ度 (%) 0~100 * 「認識モード」が「詳細」の場合のみ
ピン先端の定義形状と認識画像が一致しているかの
判定基準を指定します。マッチ度がこの値を下回った
場合は認識エラーになります。
なお、0%が指定された場合は 50%として動作します。
仮中心基準 ピン / ボディ 「ピン」の場合は、基準ピンの検出中心位置を部品中
心位置とし、「ボディ」の場合は、部品外形の中心位置
(「仮中心算出方法」で指定した方法で算出)を部品中
心位置とします。(図 2、図 3 参照)
外形部品外ノイズカ
ット数
外形部品内ノイズカ
ット数
0/1/2/3/
4/5/6/7
* 「仮中心基準」が「ボディ」の場合のみ
ノイズカットの適用量を指定します。
画像に加工を加えるため、過度に適用すると情報量
が低下します。
ヤマハ発動機株式会社IM 事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50229 4/11
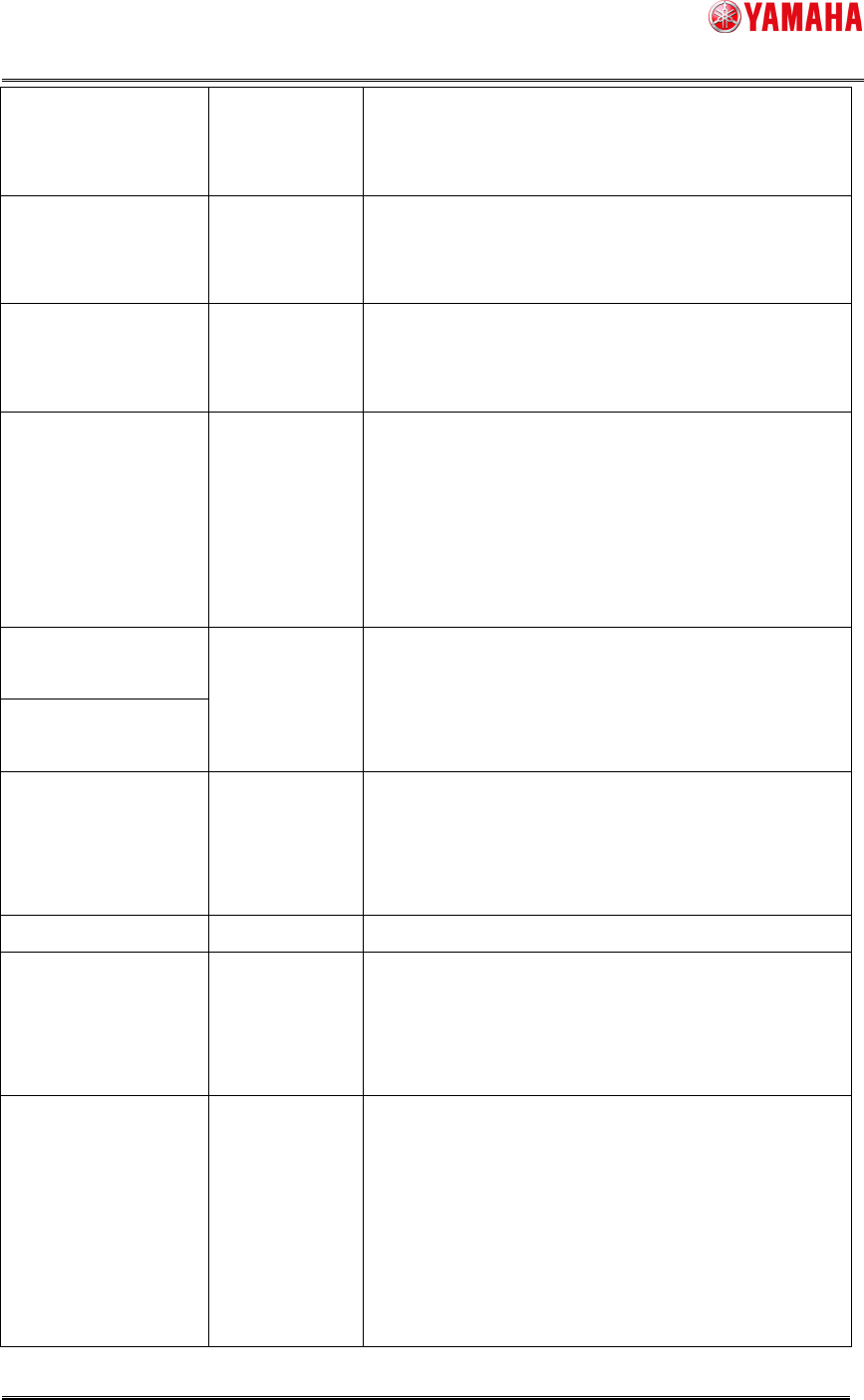
外形対象物タイプ 白 / 黒 * 「仮中心基準」が「ボディ」の場合のみ
部品外形が明るい色の場合は「白」、暗い色の場合は
「黒」を指定します。
外形ノイズカット優先
順
部品内優先 /
部品外優先
* 「仮中心基準」が「ボディ」の場合のみ
ノイズカットの実行順を指定します。
通常は、先に実行した方の影響が大きくなります。
外形 2 値化しきい値 0~255 * 「仮中心基準」が「ボディ」の場合のみ
部品外形の白黒を分離する際のしきい値を指定しま
す。部品外形がはっきり認識できるように調整します。
仮中心算出方法 重心 /
外接矩形中心
* 「仮中心基準」が「ボディ」の場合のみ
部品中心位置の計算方法を指定します。
検出した輪郭の重心を部品中心位置とする場合は
「重心」を、各辺のあてはめ直線で構成される矩形の
中心を部品の中心位置とする場合は「外接矩形中心」
を指定します。(図 3 参照)
ピン座標オフセット X
(mm)
ピン座標オフセット Y
(mm)
-99.999~
99.999
* 「仮中心基準」が「ボディ」の場合のみ
ピン定義位置をオフセットする場合に指定します。(図
4 参照)
ピン曲り許容値
(mm)
-99.999~
99.999
許容するピン曲り量を指定します。
ピン曲り判定はピンごとに行い、いずれか 1 本でも許
容値を超えた場合は認識エラーになります。(図 5 参
照)
方向判定 なし / あり 方向判定を実施する場合は「あり」を指定します。
チェック対象 黒 / 白 * 「方向判定」が「あり」の場合のみ
指定した輝度測定領域の輝度が、回転対称位置の輝
度よりも明るいことが期待される場合には「白」を、逆
の場合には「黒」を指定します。
検出角度 2 角度 /4 角
度
* 「方向判定」が「あり」の場合のみ
方向判定を行う角度を指定します。
部品を 90°回転させた時にピン配置が異なる場合
は、0°/180°の判定を行うため、「2 角度」を指定しま
す。部品を 90°/180°/270°回転させても同じ場合
は、0°/90°/180°/270°の判定を行うため、「4 角
度」を指定します。(図 6 参照)

ヤマハ発動機株式会社IM 事業部
マウンター技術部ソフト開発グループ
MDOC-SOFT50229 5/11
検出円直径 (mm) 0.010~99.999 * 「方向判定」が「あり」の場合のみ
輝度測定を行う円形領域の直径を指定します。(図 6
参照)
検出円中心位置 X
(mm)
検出円中心位置 Y
(mm)
-99.999~
99.999
* 「方向判定」が「あり」の場合のみ
輝度測定を行う円形領域の中心位置を指定します。
原点は部品中心です。(図 6 参照)
図 2 「仮中心基準」が「ピン」の場合の部品中心位置
図 3 「仮中心基準」が「ボディ」の場合の部品中心位置
基準ピン検出位置の中心 --> 部品中心
部品外形の輪郭の重心 --> 部品中心
部品外形の外接矩形の中心 --> 部品中心
「仮中心基準」が「ボディ」、かつ、
「仮中心算出方法」が「重心」の場合
「仮中心基準」が「ボディ」、かつ、
「仮中心算出方法」が「外接矩形中心」の場合
基準ピン
基準ピン