机器设置与安装.pdf - 第83页
MSR 服务手册 5.1 调整 AC 伺服增益 D14SC C-84-040- A0 5 . 1 - 2 ► AC 伺 服增益的调整 伺服增益的调整 伺服增益的调整 伺服增益的调整 1. 由其它 机器向示波器 供电,而不 是 MSR 主体。 2. 把示波 器的测针连接 到电机驱动 器监控终端的‘ SPM ’和‘ GND ’上。 示波器 Panadac Pxxx AC 伺服 驱动 器 SPM GND 3. 编制增 益调整程序。 = 参考 …
MSR
服务手册
5.1 调整 AC 伺服增益
5.1-1 D14SCC-84-040-A0
5.1 调整
调整调整
调整 AC 伺服增益
伺服增益伺服增益
伺服增益
Sentence No. D14SCC-84-040-A0
=准备
准备准备
准备=
1. 示波器
=确认
确认确认
确认=
机器处于以下状态,需要进行AC伺服增益的调整。
1. 监控器画面上显示‘Driver error’(驱动程序错误)或者‘Motor movement impossible’(电机不
能运转)时。
2. 电机发出异常声音时。
3. 更换电机或驱动器时。
4. 电机运转出现异常时。
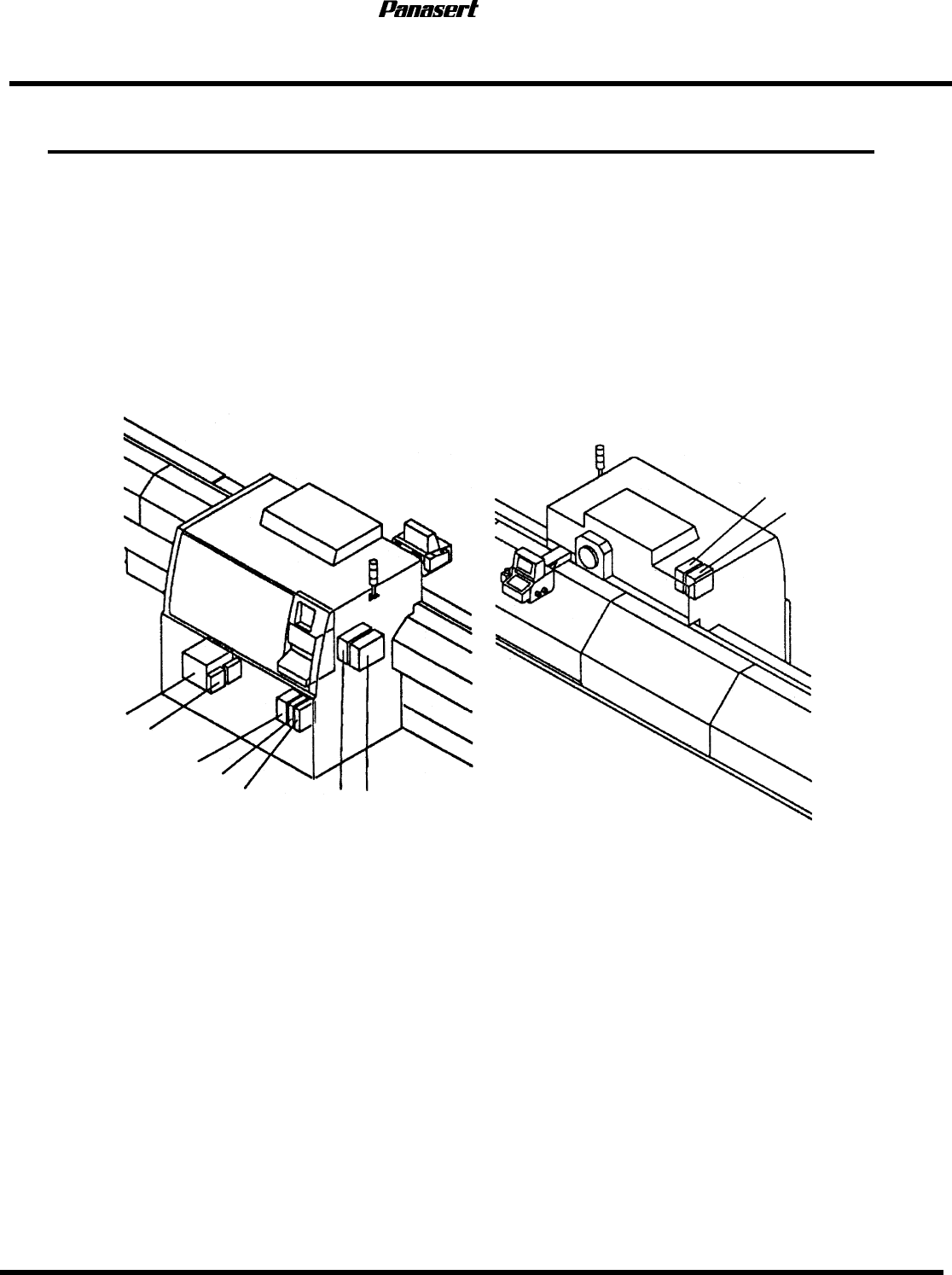
CT
轴
ZL
轴
H
轴
BT1,BT2
轴
Y
轴
X
轴
XY-T
轴
ZR
轴
VT
轴
AC伺服电机驱动器配置图
MSR
服务手册
5.1 调整 AC 伺服增益
D14SCC-84-040-A0 5.1-2
► AC伺服增益的调整
伺服增益的调整伺服增益的调整
伺服增益的调整
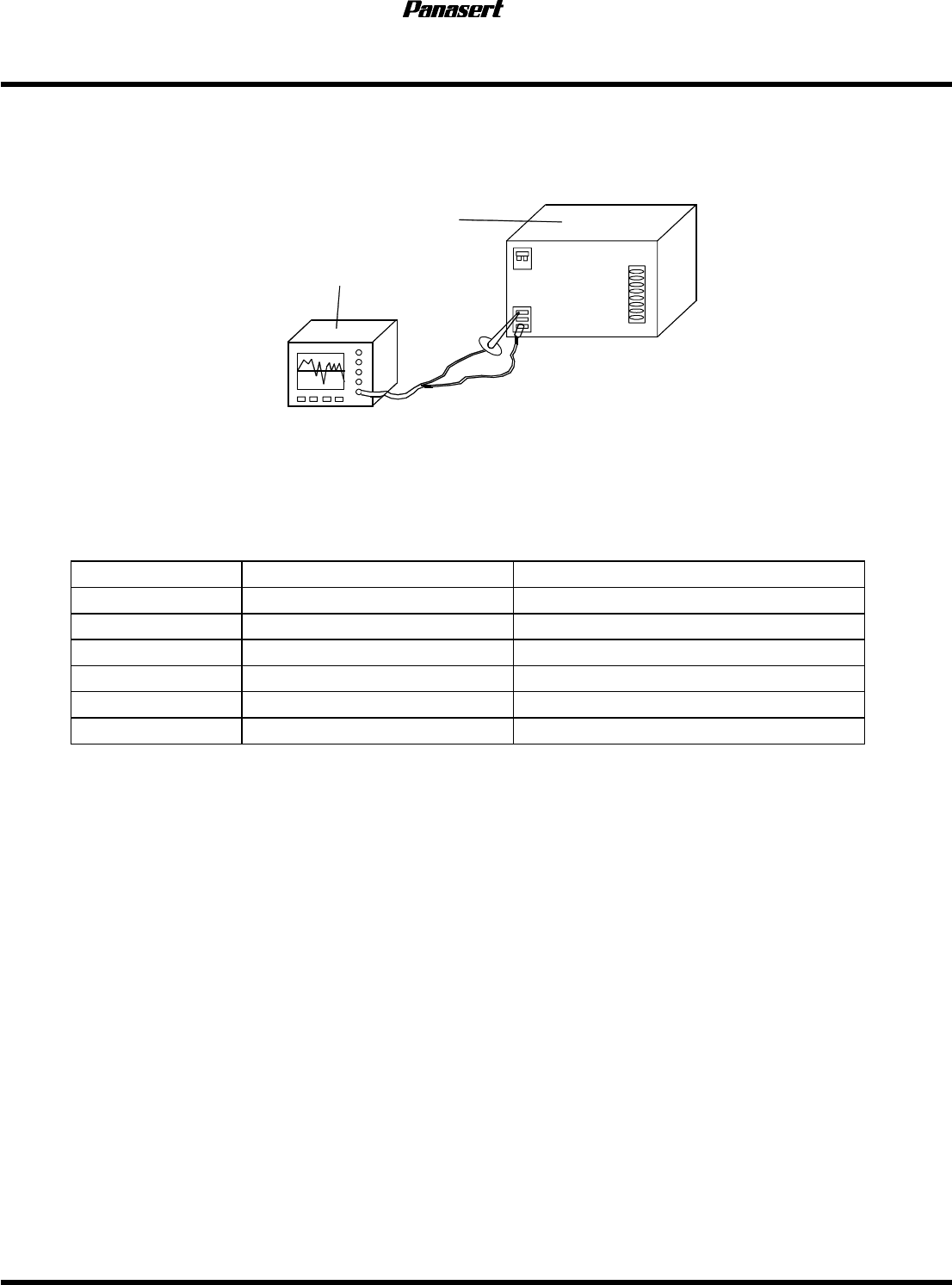
1. 由其它机器向示波器供电,而不是MSR主体。
2. 把示波器的测针连接到电机驱动器监控终端的‘SPM’和‘GND’上。
示波器
Panadac Pxxx
AC
伺服
驱动
器
SPM
GND
3. 编制增益调整程序。
=参考
参考参考
参考=
请参照下表。
增益调整程序设定条件
轴名称
轴名称轴名称
轴名称 头轴速度
头轴速度头轴速度
头轴速度 移动量
移动量移动量
移动量
X, Y 轴 No. 1 (xy 速度) 12,20,40mm
XY-T 轴 No. 1 (xy 速度) 3,6mm
ZL, ZR 轴
No. 1
0.5,1.6 间距
H 轴
No. 1
Z 轴固定,10间距移动
镜筒
No. 1
6mm (元件厚度)
吸着
No. 1
无移动 (但有负载)
=参考
参考参考
参考=
在编制增益调整程序时,请参照“使用说明书编程手册”。
4. 运行程序,用示波器确认AC伺服驱动器的波形和伺服电机的状态。
MSR
服务手册
5.1 调整 AC 伺服增益
5.1-3 D14SCC-84-040-A0
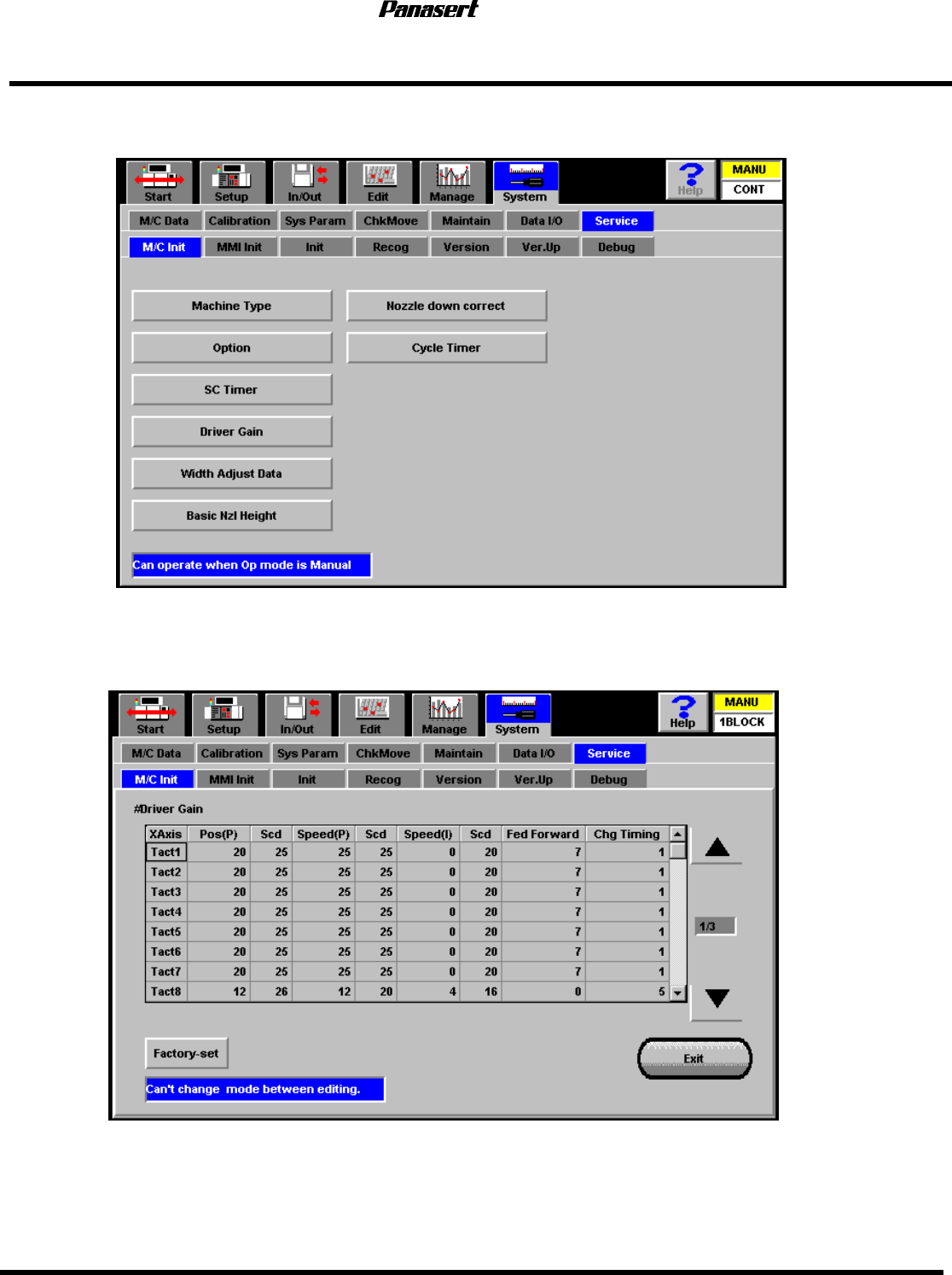
5. 把操作级别转换为4级,并在操作画面上选择[System](系统管理)。
6. 选择[Service](服务)→[M/C Init](机器设定) →“驱动器增益”。