JAKA Zu sp使用手册 -英文版.pdf - 第3页
JAKA Zu Sp 3 1.1 B ACKGROUN D ..................... ..................... ..................... ..................... ..................... ..................... ..................... .... 4 1.2 P URPOSE ................…
2 JAKA Zu Sp
Z u s p M a n u a l
JAKA Zu s p
Ve r s i o n n u m b e r :

JAKA Zu Sp 3
1.1 BACKGROUND
.......................................................................................................................................................
4
1.2 PURPOSE
................................................................................................................................................................
4
CHAPTER 2 DESCRIPTION
......................................................................................................................................
5
CHAPTER 3 JAKA ZU SP SYSTEM SETUP
............................................................................................................
6
CHAPTER 4 USE OF JAKA ZU SP
...........................................................................................................................
6
CHAPTER 5 USE NOTICE
.........................................................................................................................................
9
CHAPTER 6 SENSOR SIZE OF EACH TYPE OF JAKA ZU SP
.........................................................................
11
6.1 JAKA ZU3 SP
......................................................................................................................................................
11
6.2 JAKA ZU7 SP
......................................................................................................................................................
12
6.3 JAKA ZU12 SP AND JAKA ZU18 SP
....................................................................................................................
13
CONTENTS
CHAPTER 1 INSTRUCTION
....................................................................................................................................
4
4 JAKA Zu Sp
Chapter 1 Instruction
1.1 Background
Industrial robot arm has been widely used in various industrial scenes. It can be used for
industrial applications such as parts grasping, assembling, material handling, etc. However,
traditional industry robot cannot meet small and medium-sized enterprises requirements because
their products are usually small batch, customization and quickly renewed. JAKA Zu series of
collaborative robots can be deployed quickly and programmed easily which can help these
enterprises solve their problems effectively.
1.2 Purpose
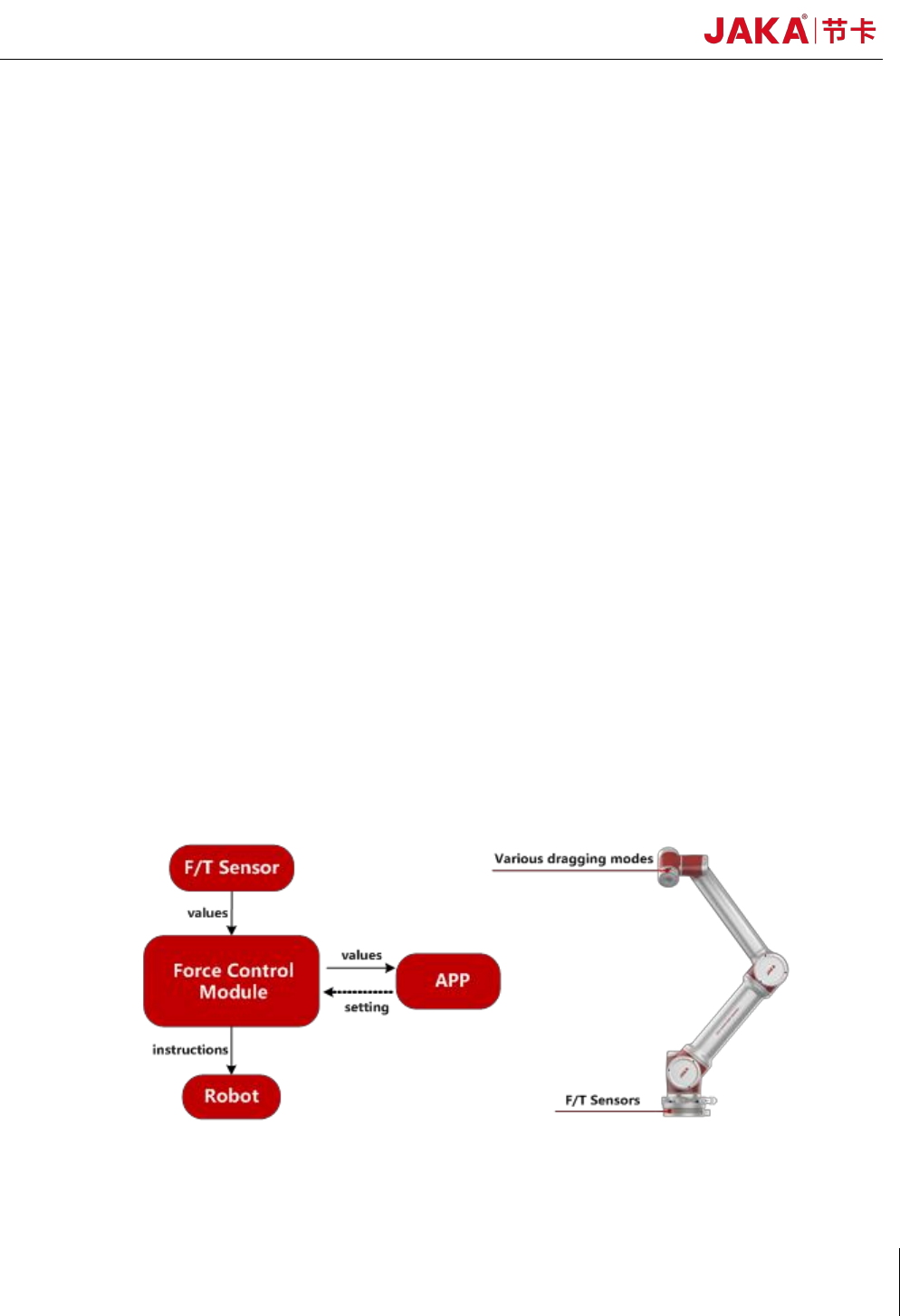
JAKA Zu sp is designed to use industrial-grade F/T sensors and integrated force control
algorithms to improve the perception of collaborative robot which can provide better
human-computer interaction experience and security guarantee for customers. As shown in figure 1,
the F/T sensor is installed on the base of the robot, and the force values are transmitted to the robot
controller in real time. When the robot body or end-effector is subjected to external forces, the force
control module will make the robot stop moving immediately, so as to ensure the safety of people
and machines. At the same time, the operator can lead the robot to move in three directions through
any part of the robot body.
.
Fig 1. JAKA Zu sp function diagram