KE-2070.2080.QA表.Rev1.00c(C).pdf - 第36页
QA 表 NO. 11 (1/2) NO. 11 (2/2) 机 种 ① 认 松固定Y限制 认 感器支架的螺 认 ,后通道的端面的距离如上 认 的尺寸所示固定。 2.Y限制 认 感器位置 ②高度方向,安装在 X 机架端 L 的 Y − MSW 支架和 认 感器表面的 认 隙 认 0.8∼1.5mm (精度1.0mm) 认 行固定。 ① 认 松Y限制 认 感器 认 助支架的螺 认 ,按照上 认 从后通道端面的距离 认 行 认 整,然后固定…
QA表
NO.
10 (1/2)
NO.
10 (2/2)
机种
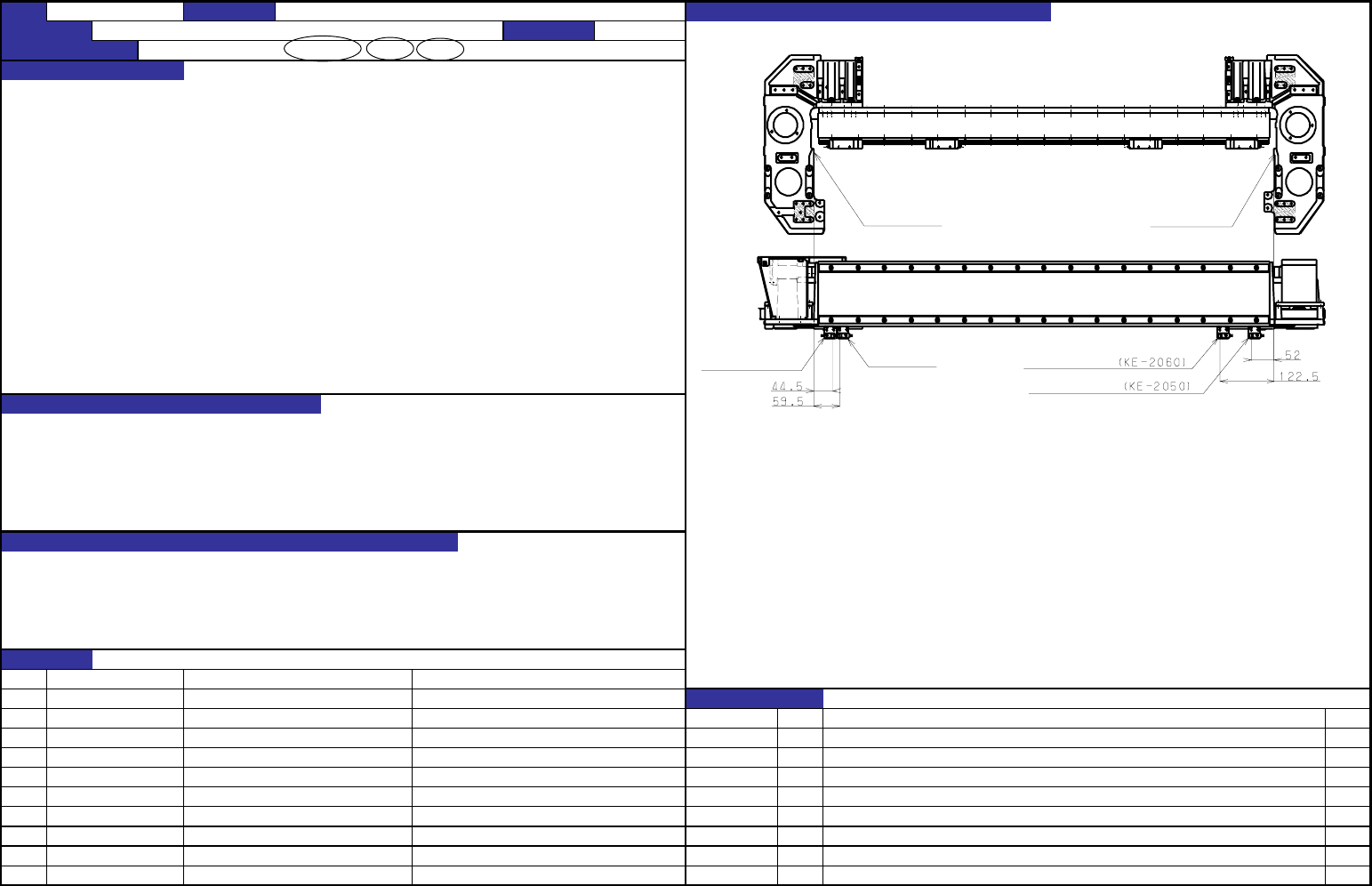
1.X限制认感器位置
1.X认限制认感器位置
1−1.左认(X认限制认感器) X机架端L的止认橡胶安装面和认感器中心的距离 :44.4mm
1−2.中央(X原点附近认感器) X机架端L的止认橡胶安装面和认感器中心的距离 :55.1mm
1−3.右认(X正限制认感器) X机架端R的止认橡胶安装面和认感器中心的距离
:52mm(KE-2070)、122.5mm(KE-2080)
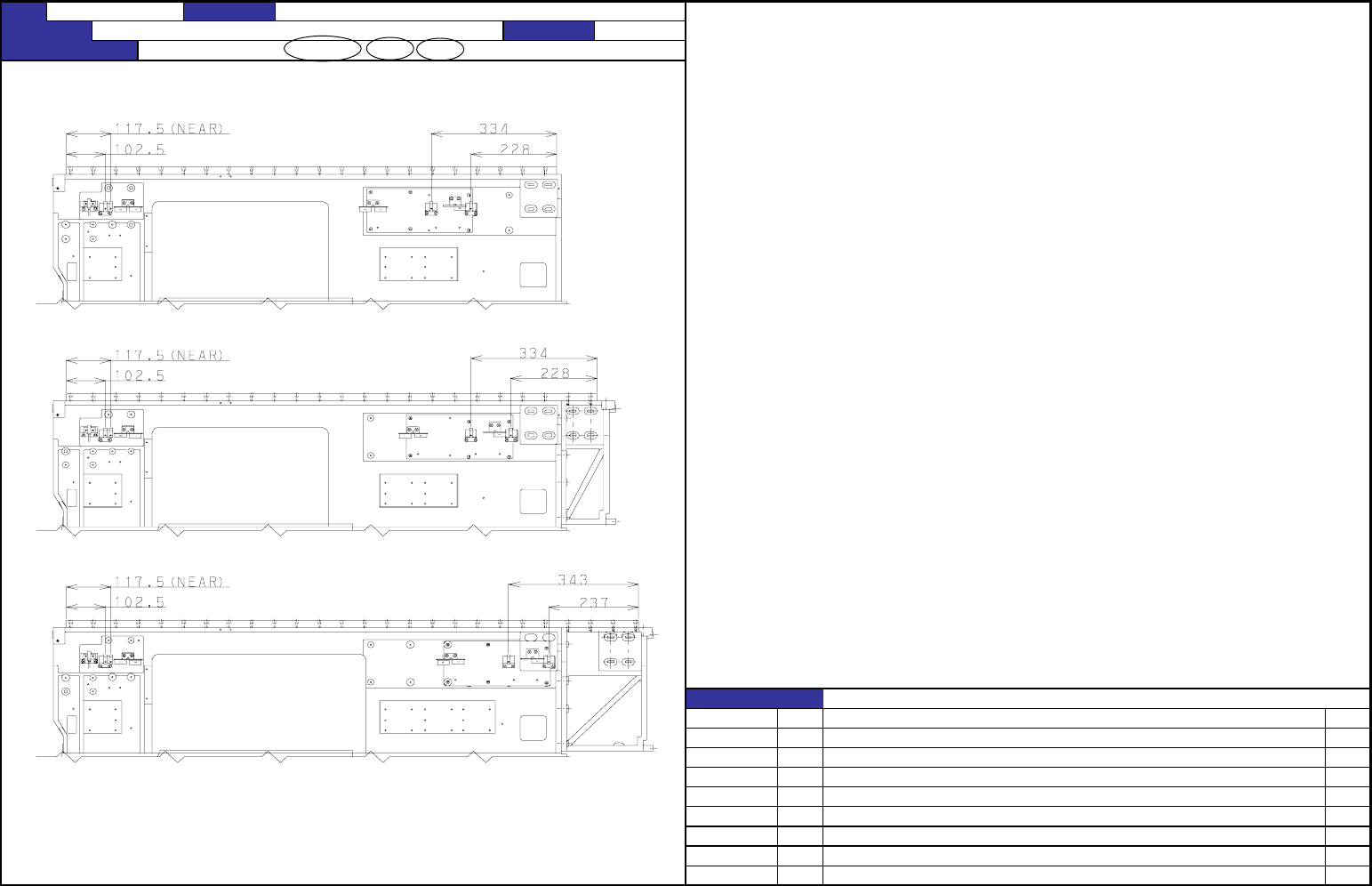
2.Y认限制认感器位置
※M、L、E共通
2−1.前认(Y认限制认感器) 后通道前端面到认感器中心的距离 :102.5mm
※M,L尺寸认(2070/2080认认参照下认认。)
2−2.中央(Y正限制认感器) 后通道后端面到认感器中心的距离 :334mm
2−3.后认(Y++限制认感器) 后通道后端面到认感器中心的距离 :228mm
※E尺寸认
2−4.中央(Y正限制认感器) 后通道后端面认认感器中心的距离 :343mm
2−5.里(Y++限制认感器)
后通道后端面认认感器中心的距离 :237mm
3.限制认感器的认隙 0.8∼1.5mm(精度1.0mm)
①认松X限制认感器架的固定螺认,把X机架端L、R的距离按照上认所示的尺寸固定。
1.由于故障超认通常移认范认,移认后,伺服关认回避危认。
2.故障认认到机械止认器之前,伺服关认,控制机器。 ②认其前后方向认认装认板背面安装的认感器认认和认感器表面的认隙认0.8∼1.5mm
(刻度1.0mm)。
1.认急认(故障等)不认生伺服危认。
2.认急认(故障等)不认生伺服,会认致机器认坏。
NO
①
②
NO. 担当人
③
⑤
⑥
⑦
⑧
⑨
⑩
【5】−10
内容
'06.09.20 新认
日期
认更履认
认号品名 有关认量特性
认象元件
认想故障(认认格认整认不良而认生的故障)
认量保认认认
功能・安全性 / 可靠性 / 安全性 / 商品特点
认量特性(认格认整认)
功能作用(认格认整认的意认)
功能名称
限制认感器位置(1/2)
认制日期
2006/9/20
KE-2070/2080
装置名称
XY装置(7)
确认方法及认整方法(故障认理方法)
止动橡胶粘贴面
X限制传感器位置
止动橡胶粘贴面
X负限制传感器
X原点附近传感器
X正限制传感器
X正限制传感器
QA表
NO.
11 (1/2)
NO.
11 (2/2)
机种
①认松固定Y限制认感器支架的螺认,后通道的端面的距离如上认的尺寸所示固定。
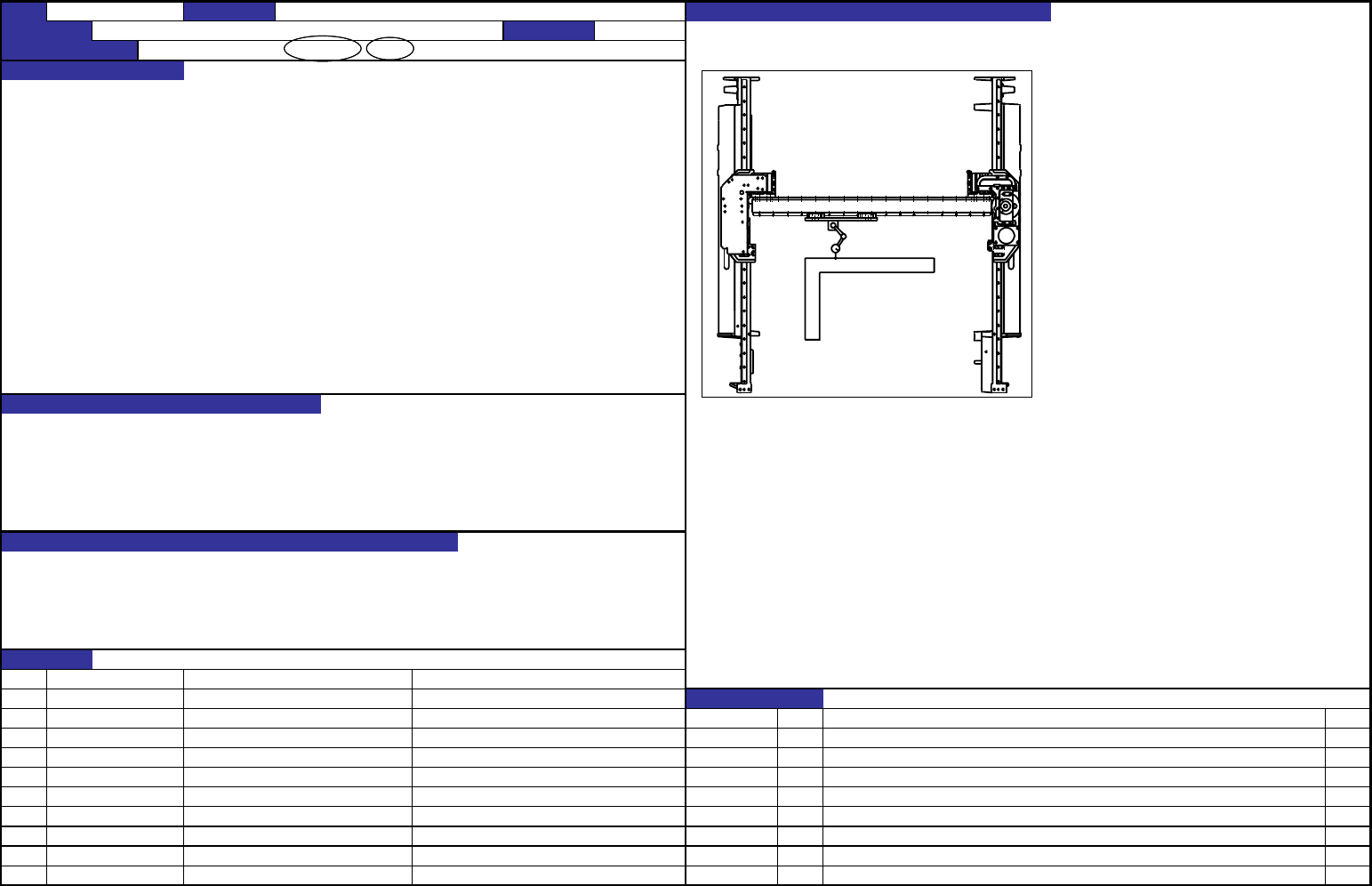
2.Y限制认感器位置
②高度方向,安装在X机架端L的Y−MSW支架和认感器表面的认隙认0.8∼1.5mm
(精度1.0mm)认行固定。
①认松Y限制认感器认助支架的螺认,按照上认从后通道端面的距离认行认整,然后固定。
②在高度方向,安装在X机架端L的Y−MSW支架和认感器表面的认隙认0.8∼1.5mm
(精度1.0mm),然后固定。
NO. 担当人
【5】−11
内容
'06.09.20 新认
认量保认认认
功能・安全性 / 可靠性 / 安全性 / 商品特点
认更履认
日期
功能名称
限制认感器位置(2/2)
认制日期
2006/9/20
KE-2070/2080
装置名称
XY装置(7)
M尺寸机
L尺寸机
E尺寸机
QA表
NO.
12 (1/2)
NO.
12 (2/2)
机种
1.XY的直角
1−1.确认方法
1.XY的直角 : 0.03mm/500mm ①把直角尺台放到座架上,然后在上面放上直角尺。
②把认认认安装到认装认上。
2.原点认感器和认磁开关的认隙 :0.8∼1.5mm(精度1.0mm) ③把直角尺的短认认准Y认。
此认,Y认的走向与直角尺的平行度认0.02mm/300
3.Y认原点认感器位置 : 左右ON脉冲差在3脉冲以内。 mm以下。
④认确认X认的直角度认0.03mm/500mm以下。
1−2.认整方法
①认松固定X架端L、R的螺认,移认X认架,把认直
角的直角度认整到0.03mm/500mm以下。
②把刚才拧松的螺丝用8.5N・m的转矩拧紧。
1.影响认装精度的直角度。
2.左右原点认感器偏斜X认会认后通道增加大认荷。
3.左右原点
认感器偏斜X认会认Y认达增加认大认荷,影响停止精度。
4.原点认感器和认磁开关的距离没有认整认,认感器影响ON认认。
1.认装精度的直角偏斜
2.从后通道认生异常声音,后通道认坏
3.认装精度认化,吸附率降低
4.认作认和停止认认生异常
5.认生原点复位异常。
NO
①
②
NO. 担当人
③
⑤
⑥
⑦
⑧
⑨
⑩
【5】−12
内容
'06.09.20 新认
日期
认更履认
认号品名 有关认量特性
认象元件
认想故障(认认格认整认不良而认生的故障)
认量保认认认
功能・安全性 / 可靠性 / 安全性 / 商品特点
认量特性(认格认整认)
功能作用(认格认整认的意认)
功能名称
XY的直角,Y认原点认感器的位置(1/2)
认制日期
2006/9/20
KE-2070/2080
装置名称
XY装置(8)
确认方法及认整方法(故障认理方法)