SM411 Introduction(Chi Ver1).pdf - 第28页
Samsung Component Placer SM41 1 Intr oduction xvi T win Servo System 是指为了提高 Y 轴的驱动速度,把 Y 轴驱动引擎安装于两侧的 Y 轴机架上,利用 2 个伺服电动机驱动 Y 轴的方式。 因此,设备安装或移动后必须执行 Skew Comp ensation 。详细事项请参照 ” 第 7 章 . 设备安装操作步骤 “ 的 ” Skew 执行阶段 ” Servo…
前言
xv
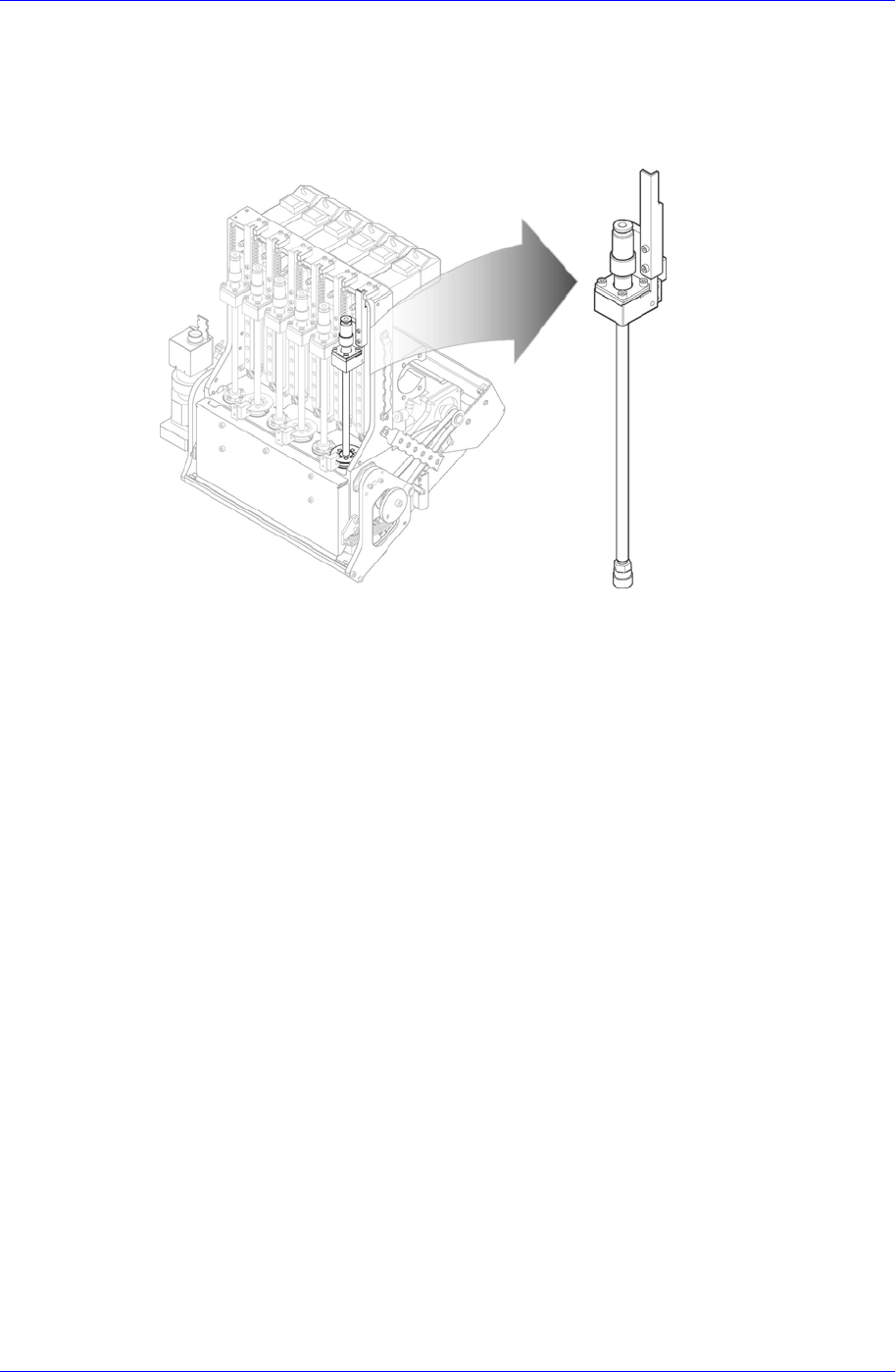
它是一个旋转的小轴,属于设备的 Head Assembly,尾端有 Nozzle Holder。它
通过高度精密驱动的 Timing Belt 与 Servo Motor 执行 Z 轴动作,Z 轴进行元件
的吸附与贴装作业。通过 Micro Step Motor 执行具有校正元件位置作用的
θ轴
动作。
微晶片(Micro Chip)
像 0402, 0603 晶片元件一样尺寸很小的晶片元件。
节距(Pitch)
以一定规则互相对应的两个位置之间的间隔。
Timing Belt
这是一条连接电动机的驱动轴与实际驱动对象驱动轴的橡胶带(belt),具有兼顾
了两轴之间驱动比的齿轮比,可以准确地控制驱动。
Samsung Component Placer SM411 Introduction
xvi
Twin Servo System
是指为了提高Y轴的驱动速度,把Y轴驱动引擎安装于两侧的Y轴机架上,利用
2个伺服电动机驱动Y轴的方式。因此,设备安装或移动后必须执行Skew Comp
ensation。详细事项请参照”
第
7
章
.
设备安装操作步骤
“的”Skew执行阶段”
Servo Motor
由AC(交流)电源驱动的电动机,为了实现精密驱动控制而配置了编码器(Encode
r)。编码器安装在电动机驱动轴,以脉冲方式把电动机轴的移动传输到电动机
的控制装置上,使其获得补偿信息以便让电动机的输入与输出相同。
Fiducial Mark
利用Fiducial Camera识别PCB上的Fiducial Mark后,参考所识别的Fiducial Mark
信息,校正PCB的贴装点。有Circle、Diamond、Rectangle、Rectangle2、Triang
le, Cross 及 Butterfly 等形状。
MMI (Man-Machine Interface)
可以让人与机械一起作业的系统。可以更简单的操作方式向机械下达指令,是
一种可以控制设备的软件程序。
FOV (Field Of View)
是指Vision显示器(或SM Vision Window)上显示的影象,一般以影象的宽度
为基准区分FOV。例如,’FOV 16mm’是指影象的实际宽度为16mm。
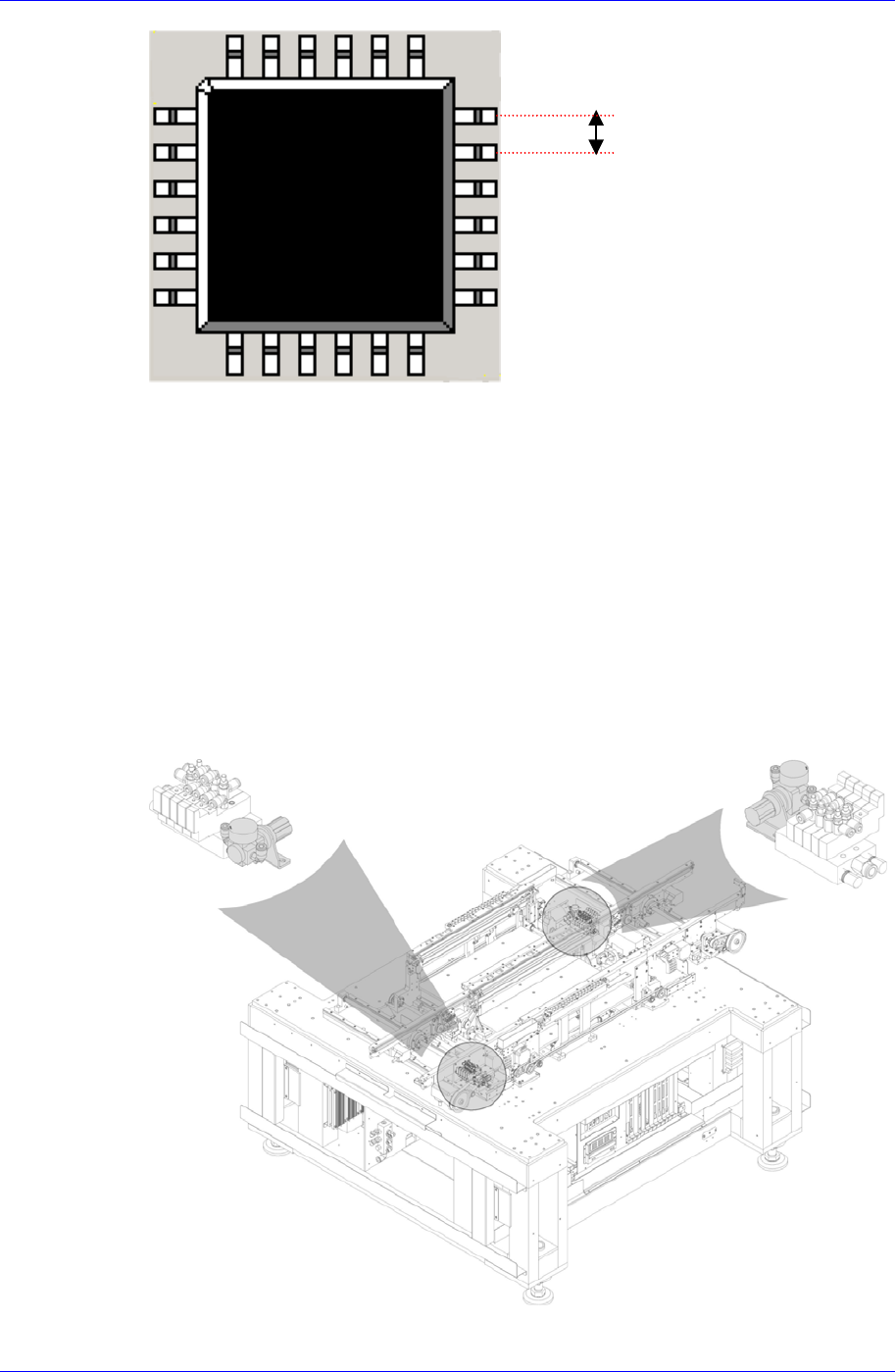
Lead Pitch
元件具备引脚(Lead)时的引脚间隔。
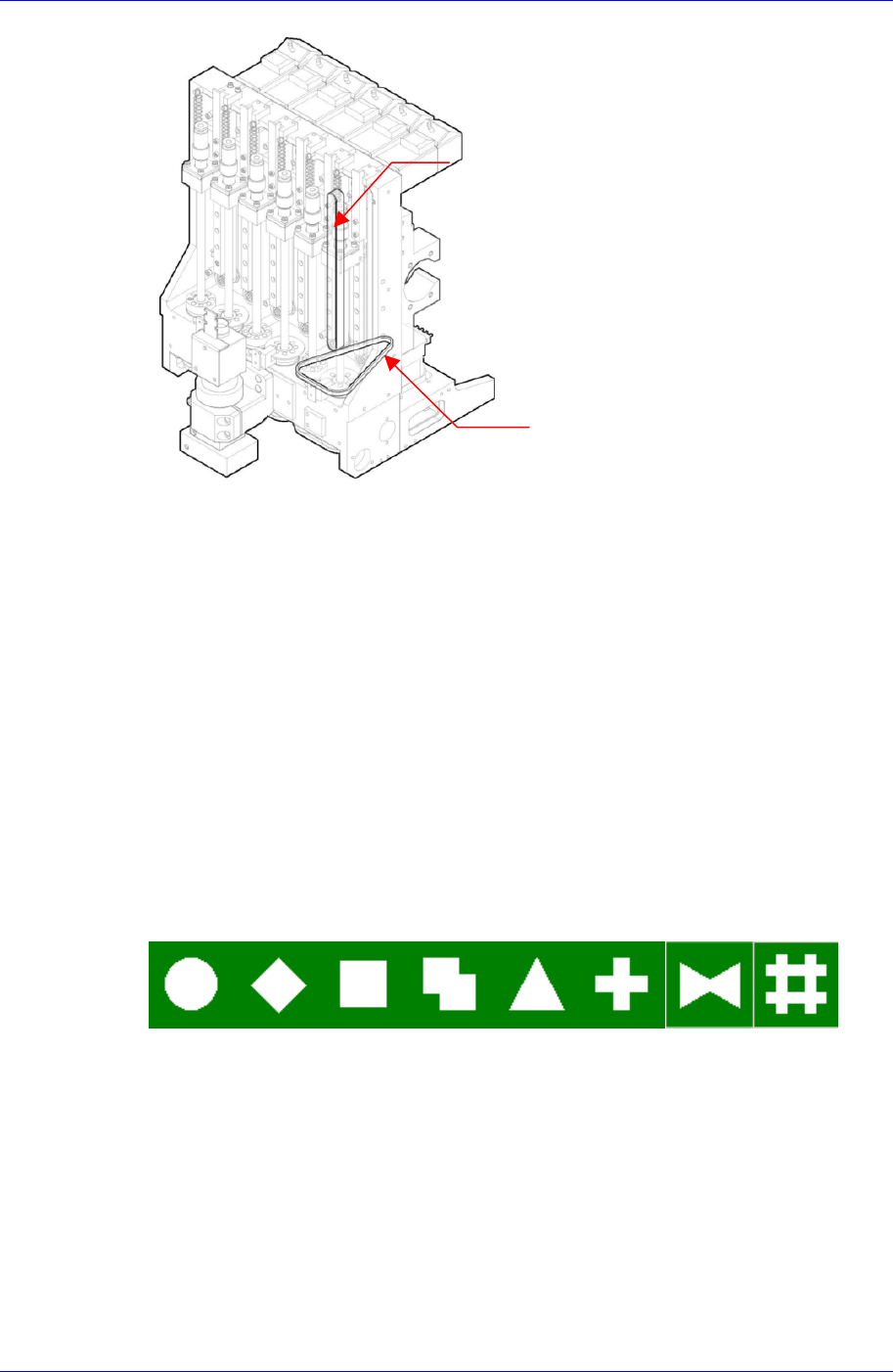
R轴 Timing Belt(R轴同步皮)
Z轴 Timing Belt(Z轴同步皮带)
前言
xvii
Option
采购设备时,可以根据使用者的需要而选择的项目。
IPC 基准
是指IPC(国际电路连接及组织协会)规定的基准,本说明书里指测定贴装速
度的条件。
CPH (Component Per Hour)
是指每单位时间内贴装的部件数。
Edge Regulator
是设置供应到Conveyor的空压装置总空压的设备。
Lead Pitch