SM411 Introduction(Chi Ver1).pdf - 第71页
Module Function 6-5 边缘固定器( Edge Fixer ) PCB 到达工作位置后开始工作之前,作为保障 PCB 的正确位置的一种方法, 通过把 PCB 推到一个 边缘的方法,使 PCB 以一边为基准确定位置。 PCB 的夹紧( Clamp ) PCB 达到 操作位置而进行操作之前 ,起着矫正位于 Belt 上的 PCB ,而且和 Back Up T able 连动运转。 工作台( Backup T ab…
Samsung Component Placer SM411 Introduction
6-4
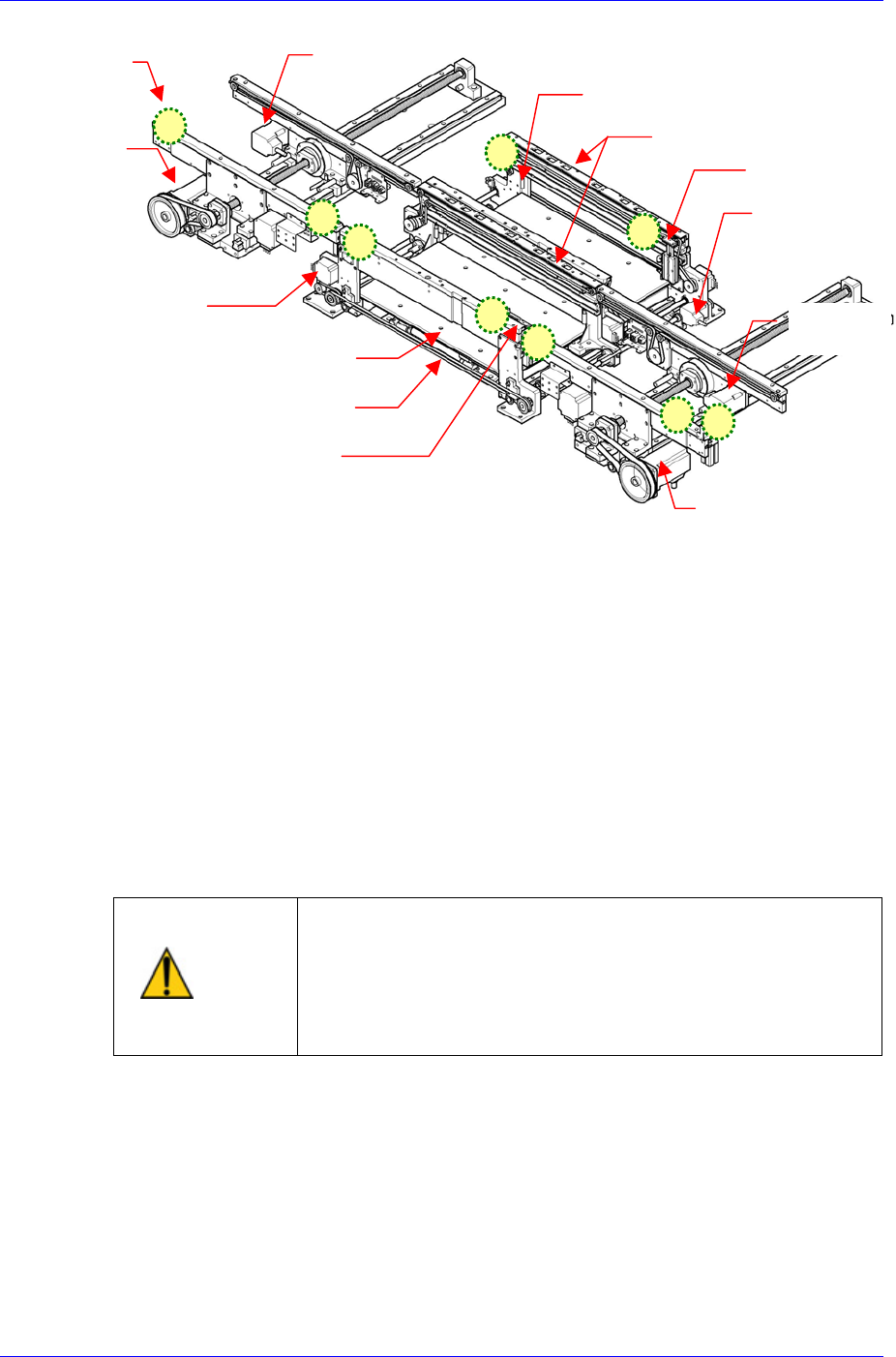
图
6-4. PCB Conveyor System Main Frame
PCB 感应 Sensor Assembly
检查 Conveyor 上各区间是否有 PCB 的作用。 具有感知 Entry Shuttle, Front
Work, Rear Work 及 Exit Shuttle 各 Unit 的 In 和 Out 的传感器,可显示稳定的
PCB 移动过程。
Belt Assembly
由 Step Motor 和平 Belt 组成, PCB 传送带分为各 Unit 分别驱动.在 Working Area
利用 Belt,可对 PCB 进行 Clamping。
宽度调整部件
根据PCB的不同尺寸,调整道轨的宽度。它由LM Guide和丝杆(Lead Screw)
, Screw, Motor , 位置感应传感器 组成。
注 意
在未检查传送装置(Conveyor)干涉或传送装置(Conveyor)内
是否有异物时调整传送装置(Conveyor)宽度会损伤传送装置(
Conveyor)。确保在调整传送装置(Conveyor)宽度前检查传
送装置(Conveyor)干涉或传送装置(Conveyor)内是否有异物
。
Shuttle Assembly
在 Entry Zone 和 Exit Zone 中, Entry Zone 时把 PCB 分配成两个 Work Conve
yor,Exit 时为了从两个 Work Conveyor 依次接受 PCB 起着前后往返的功能,
由 LM Guide 和 Ball Screw, Motor , 位置感知传感器组成。
贴装止挡器(PCB Stopper)
PCB 感应传感器
确认传送装置(Conveyor)上的 PCB 的位置。
Exit Shuttle Move
Moto
r
Front Wor
k
Width Moto
r
Entry Shuttle
Move Moto
r
PCB Clamp
Ed
g
e Fixer
PCB感应传
感器
Rear Work
Width Motor
Conveyor 手动宽度调节柄
Backup Table
Place Stoppe
r
Place Sto
pp
e
r
Entry Width
Motor
Exit Widt
h
Motor
Module Function
6-5
边缘固定器(Edge Fixer)
PCB 到达工作位置后开始工作之前,作为保障 PCB 的正确位置的一种方法,
通过把 PCB 推到一个边缘的方法,使 PCB 以一边为基准确定位置。
PCB 的夹紧(Clamp)
PCB 达到操作位置而进行操作之前,起着矫正位于 Belt 上的 PCB,而且和
Back Up Table 连动运转。
工作台(Backup Table) (BUT)
PCB到达工作位置后开始工作之前,为了保证PCB的平面度,上升后通过Backu
PPin使PCB Clamp, Hole Fixer等工作来定位PCB。
警 告
在操作工作台时可能会因工作台上的异物及器具干涉损伤传
送装置(Conveyor)。请在清除工作台上的异物后进行操作。
BUT Table分解时请接受C/S联系。
6.4. 部品吸着不良的检测
用真空吸着部品时,真空传感器(Vacuum Sensor)通过检测真空压力的变化来感
应吸着不良。吸着部品时的真空压力值基本上都用吸嘴来设定。如果需要安全的吸
着,也可适当调整每个吸嘴的吸着真空压力。
6.5. PCB 坐标的补偿功能 (基准点的识别)
此功能是设备上的动态摄象机 ( Moving Camera )先读取 PCB 上的 Fiducial
Mark(基准点标记)后,与已输入的 Fiducial Mark(基准点标记)的位置作比较的方法
来补偿贴装点的位置误差。
其他方法有全面(Global)补偿和局部(Local)补偿两种方法
全面补偿
以PCB内的一点或两个点为准,补偿贴装点的位置误差。 Array PCB时, 对Arr
ay PCB内的各个小型PCB可进行补正。 (Board定义有关设定项目中使用于 Fid
ucial Mark的设定.)
局部补偿
识别PCB内的重要部件上标记的Fiducial Mark, 可对相应部件的贴装位置进行
补正。 (在Step Program使用于为贴装位置补正的Fiducial Mark设定。)
基准点标记的识别坐标误差补偿是在 PCB 上有基准点标记时才能可以进行。
先对各 PCB 作全面补偿后,再对部品作局部补偿,可对部品的位置补偿作得更准
确,这样才可以作 PCB 的固定和贴装工作。
在它的基准点标记的识别上有自己的限制。 请与本公司C/S公司(STS)或当地代理
店(Local Agent)资讯。
备注
Samsung Component Placer SM411 Introduction
6-6
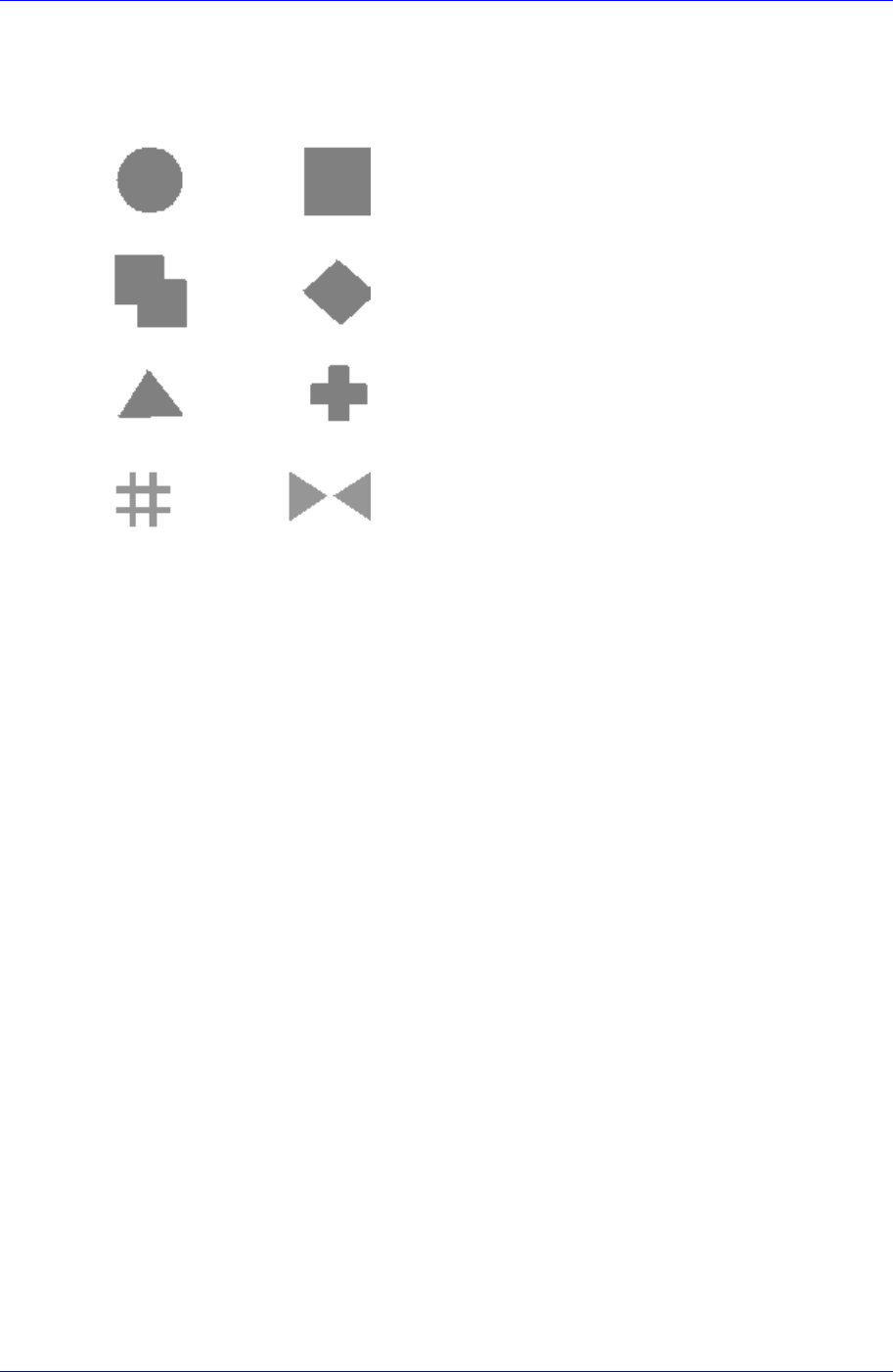
6.5.1. Fiducial Inspection(基准点的检查)
6.5.1.1. 基准点的类型
图
6-5.
基准点的类型
重影(Repeatability): ± 5
㎛
分辨率(Resolution): 43
㎛
/pixel ±5%
图象处理速度(Image processing speed): 100 msec (ø 2mm 圆)
6.5.1.2. 基准点标记的尺寸和允许公差
各基准点标记的外廓尺寸为 0.5mm ~ 4.0mm,其允许误差是10%以内。
6.5.1.3. 空隙区域 (Clearance Area)
在基准点标记的周遍应有没有任何标记(焊盘, 焊锡, 记号)的四角形空隙区域。空
隙区域应确保从标记的(圆柱面)外面0.5mm 以上的面积。也就是说基准点标记
的周围 0.5mm 以内不应有任何记号。
6.5.1.4. 标记的材料和表面处理:
所有识别用标记应该是未作表面处理的铜薄面,或是要作以下的表面处理。
透明的非氧化处理
(电)镀镊
(电)镀锡
(电)镀锌
(电)镀金
抗氧化处理(Reflower Solder Coating)
Flux Coating