SM411 Introduction(Chi Ver1).pdf - 第42页
Samsung Component Placer SM41 1 Intr oduction 2-6 2.4. XY - 轴的规格 表 2-1. XY - 轴的规格 区 分 规 格 备 注 机械装置 X 轴 : AC Servo + Ball Screw Y 轴 : AC Servo + Ball Screw (Twin) 750 W 1000 W * 2 减速比 X 轴 1:1 , Y 轴 1:1 反复精度 ± 0.008 mm X 轴…
设备的规格
2-5
2.3. PC 规格
2.3.1. 计算机用户界面
2.3.1.1. Software
SM411 MMI Software
2.3.2. 内置电脑
2.3.2.1. Hardware
Windows XP Embedded
CPU Intel Pentium™ 4/ 3.2E
MC68040 (VME)
Hitachi HDD 80GB, IDE
DDR SDRAM 512MB(3200)
USB Port 支持 (可以使用USB Memory)
Keyboard: Mini Keyboard (86 Key)
Mouse: Optimical mouse (Microsoft 互换)
2.3.2.2. Display
Monitor: 12 inch TFT LCD (1024 x 768)
为了改善性能,变更设备的规格时,不经另行通知。
备注
Samsung Component Placer SM411 Introduction
2-6
2.4. XY-轴的规格
表
2-1. XY-
轴的规格
区
分
规
格
备
注
机械装置
X轴: AC Servo + Ball Screw
Y轴: AC Servo + Ball Screw (Twin)
750 W
1000 W * 2
减速比 X轴 1:1 , Y轴 1:1
反复精度
± 0.008 mm
X轴: 3.2 µm/pulse
移动精度
Y轴: 3.0 µm/pulse
X-轴的范围
743 mm
739 mm
H/W Limit
S/W Limit
Y-轴的范围
768 mm
764 mm
H/W Limit
S/W Limit
加减速模式
1.8 m/sec, 3G
2.0 m/sec, 3G
X轴
Y轴
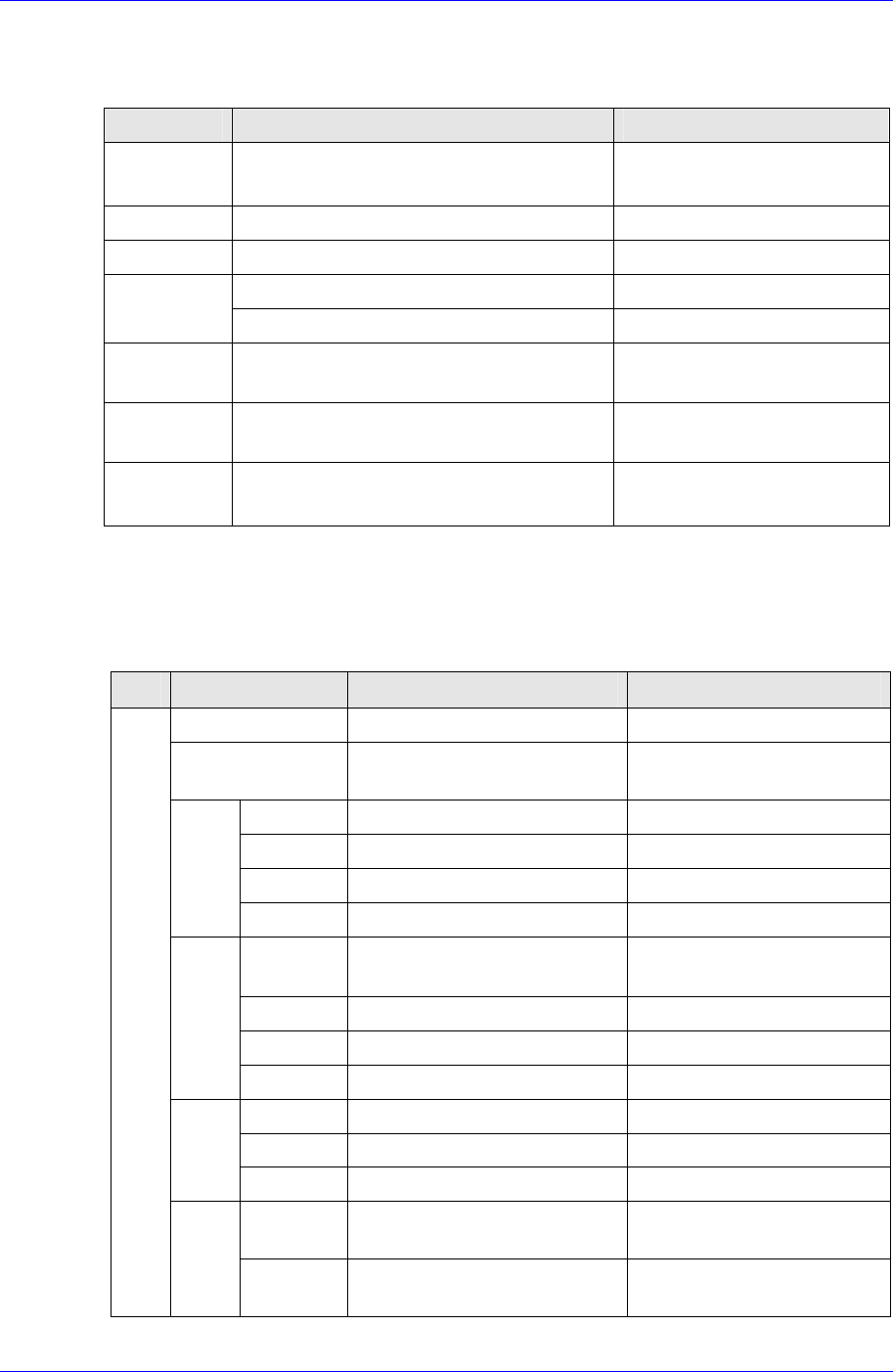
2.5. Head的规格
表
2-2. Head
的规格
区分
项 目 规 格 备 注
吸嘴的数量 6 Nozzle 标准 4 Nozzle 选项
Head 的间距
30 mm
8mm, 12mm, 16mm Feeder
吸着可能的程度
机械装置
AC Servo motor + Belt & LM
动作范围 最大96mm
Stopper to stopper
移动精度
0.010 mm/pulse
基于示教
Z轴
反复精度
± 0.01 mm
最佳条件
机械装置
Micro stepping motor +
Belt & Pulley
Head 1/2, 3/4, 5/6 Pair
Head 7/8, 9/10, 11/12 Pair
动作范围
Unlimited°
移动精度
0.014 °/pulse
示教基准
R轴
反复精度
± 0.03 °
机械装置
AC servo motor + Belt & Cam Motor: 50 W
移动精度 0.018
˚
/pulse
Swing
Mirror
反复精度 ±0.02
˚
Clamping
方法
Taper clamp + Ball
Head
Nozzle
holder
Clamping
ball 的数
3 个
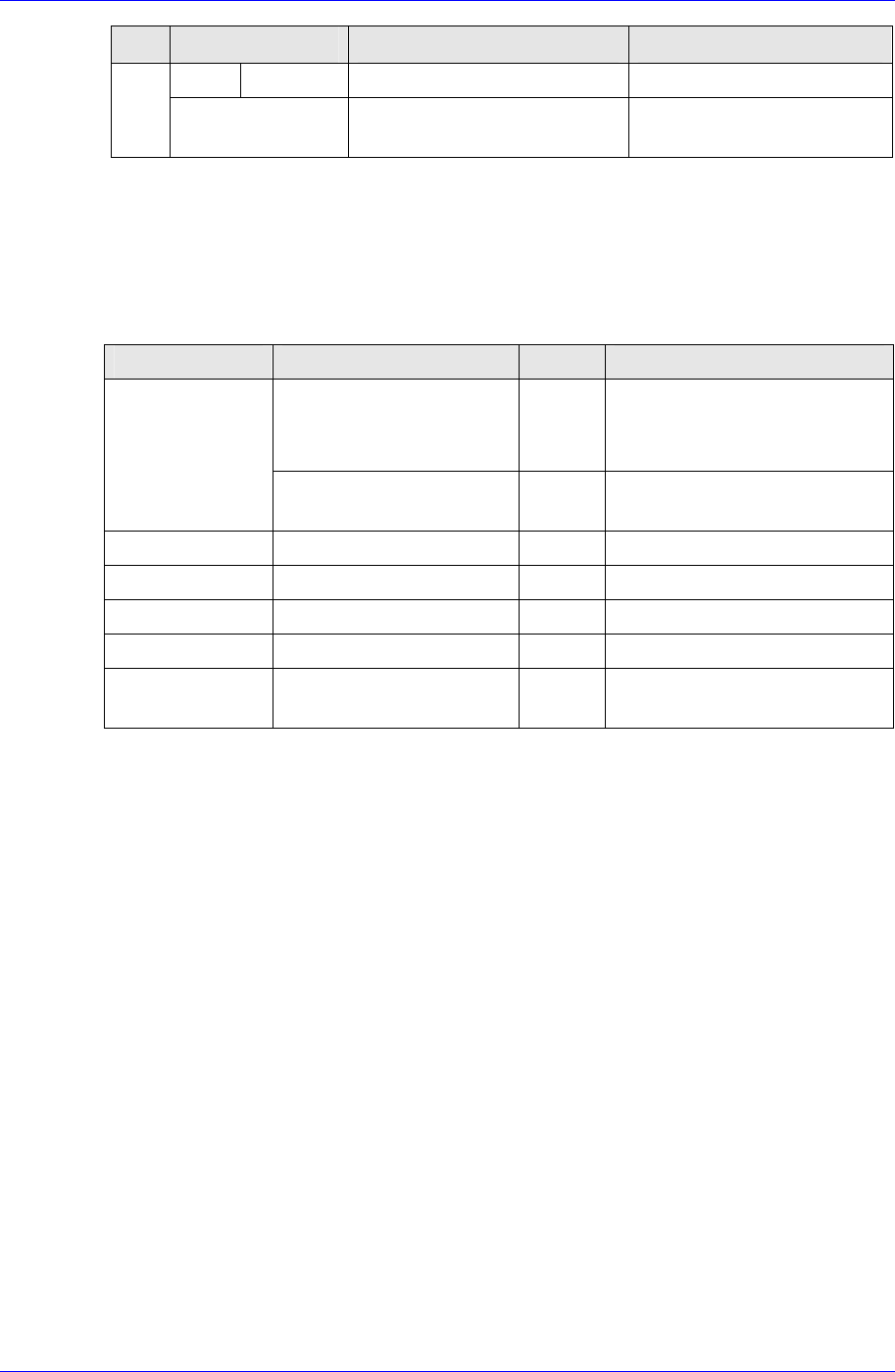
设备的规格
2-7
区分
项 目 规 格 备 注
Cushion
没有Cushion Nozzle的Cushion 设置
识别方法
Flying Vision (CCD Camera)
Stage Vision (CCD Camera)
安装数码照明装置
2.6. PCB 规格
2.6.1. PCB的规格,弯曲允许误差
表
2-3. PCB
规格
区
分
规
格
SM411
备
注
(L)510mm x (W)460mm
(L)460mm x (W)250mm
O
Single Lane
超(L)460mm: Buffer
适
不
用可
Dual Lane
PCB 的最大尺寸
(L)610mm x (W)460mm
(L)610mm x (W)250mm
Single Lane
Dual Lane
PCB 的最小尺寸
(L)50mm x (W)40mm
O
厚度
0.38 mm ~ 4.2 mm
移送可能PCB
2.0 Kg
允许弯曲度公差 (上):0.5mm, (下):1.5mm
部件上下对应 (上):10mm, (下):25mm
根据支架的位置而可能有所差
异
O: 标准, : Factory Option, X: 适
不
用可