SM411 Introduction(Chi Ver1).pdf - 第60页
Samsung Component Placer SM41 1 Intr oduction 4-6 ▼ : 把 Head 向原点移动(原点复位)。 ◀ : 忽略。 模式( Mode ) 选择 Jog, Bang, Home 等模式。每按一次,以 Jog ⇒ Bang ⇒ Home ⇒ 灯灭 ⇒ Jo g …的顺序, LED 指示灯变换灯亮,同时模式 也变换。 各模式的内容如下。 Jog: 移动各轴的模式。 Bang: 细微移…
运行操作部分
4-5
注 意
如果将磁盘放在后面附有磁铁的示教盒附近,有可能删掉磁
盘里面的数据。不可以将磁盘放在后面附有磁铁的示教盒附
近。
速度的提高和降低(Speed Level Up/Down)
选择在 Jog 模式的动作速度。从模式(Mode)选择 Jog 后,按下<Up>键可使
速度加快,按下<Down>键可使速度放慢。速度可选择 5 个级别。
FREE
在紧急情况下按此键,可以马上停止本设备的运转。除电脑的电源之外,其它
电源全部停止供应。与主机的运转面板的<EMG>功能相同。
◀▶▲▼ 按键
指示各轴的移动方向或旋转方向,根据不同 Mode(模式)和 Axis(轴)的选择,其
动作也不同。
选择 Mode=Jog 或 Bang, Axis=XY 时:
▲: 向+Y 方向移动 Head。
▶: 向+X 方向移动 Head。
▼: 向-Y 方向移动 Head。
◀: 向-X 方向移动 Head。
选择 Mode=Jog 或 Bang, Axis=Z/R 时:
▲: 向+Z 方向提升吸嘴(Nozzle)。
▶: 向顺时针方向旋转吸嘴(Nozzle
)。
▼: 向-Z 方向降低吸嘴(Nozzle)。
◀: 向逆时针方向旋转吸嘴(Nozzle)。
选择 Mode=Jog 或 Bang, Axis=S 时:
▲: 向顺时针方向旋上反射镜 (Mirro)。
▶: 忽略。
▼: 向顺时针方向旋下反射镜 (Mirro)。
◀: 忽略。
选择 Mode=Jog 或 Bang, Axis=W/Cv 时:
▲:
向+Y 方向移动传送装置(Conveyor)的背面框架来加宽 Conveyor 的宽度。
▶: 向+X 方向驱动固定部传送装置(Conveyor)。
▼ : 向 -Y 方向移动传送装置(Conveyor) 的背面框架来缩小传送装置
(Conveyor)的宽度。
◀: 向-X 方向驱动固定部传送装置(Conveyor)。
选择 Mode=Home 时:
▲: 忽略。
▶: 忽略。

Samsung Component Placer SM411 Introduction
4-6
▼: 把 Head 向原点移动(原点复位)。
◀: 忽略。
模式(Mode)
选择 Jog, Bang, Home 等模式。每按一次,以 Jog⇒Bang⇒Home⇒灯灭⇒Jo
g…的顺序,LED 指示灯变换灯亮,同时模式也变换。
各模式的内容如下。
Jog: 移动各轴的模式。
Bang: 细微移动各轴的模式。
Home: 各轴的原点复归模式。
轴(Axis)
选择动作对象,每按一次,以 XY⇒Z/R⇒S⇒W/Cv⇒灯灭⇒XY…的顺序,LE
D 指示灯变换灯亮,动作对象也变换。
各自的内容如下。
XY: 把动作对象指定为 Head 的 XY 方向。
Z/R: 把动作对象指定为吸嘴(Nozzle)的 Z 方向或旋转方向。
S: 把动作对象指定为反射镜旋转方向。
W/Cv: 把动作对象指定为传送装置(Conveyor)的 X 方向或 Y 方向。
指示灯灭: 模式选择 Home 时,对 X, Y, Z, R,全体进行原点复归。
Head
模式选择Home以外的模式,Axis(轴)选择Z/R时,指定作为动作对象的Head的
编号。 Axis选择W/C/B时,指定作为动作对象的输送器或BUT。
G.SEL
操作示教框时除输送机操作以外首先要选择成为动作对象的 Gantry。选择成为
动作对象的 Gantry。
传感器的功能
5-1
第5章. 传感器的功能
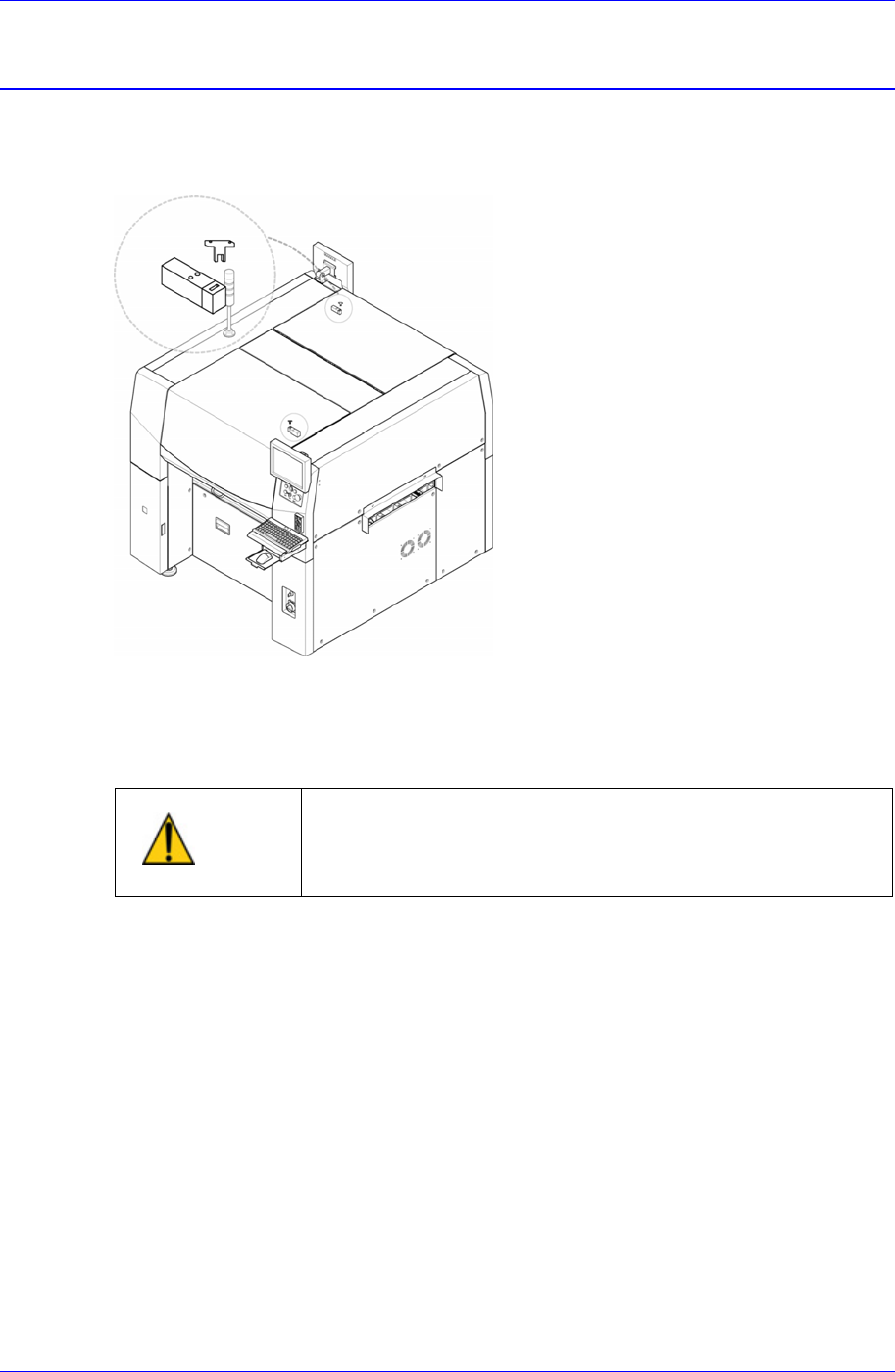
5.1. 门开关 (Door Switch)
本设备装有能感应正门和背门的开闭状态的门开关。
图
5-1.
门开关
(Door Switch)
在本设备的运行当中(Run运行状态时),打开门时,门开关就起动,设备处于紧急
停止状态。关上门即可解除紧急停止状态。在此状态下,重新运行设备时,先按下
运行面板上的<Ready开关>开关后再按<Start开关>开关。
警 告
如果人为的拆除门的安全传感器,即使门被打开设备也不会
停止运行,因此可能造成人员受伤。
禁止人为拆除门的安全传感器。