KE-2070_2080机器控制参数.pdf - 第76页
R e v 1 . 00c 机械控制参数 4-33 (3) 设定 № 区分 内 容 1 0 Y 轴左侧 (伺服) 2 1 Y 轴右侧 (伺服) 3 2 X 轴左侧 (线性) 4 3 X 轴右侧 (线性) 5 4 Z 轴 L1 Head (伺服) 6 5 θ轴 L1 Head (伺服) 7 6 Z 轴 L2 Head (伺服) 8 7 θ轴 L2 Head (伺服) 9 8 Z 轴 L3 Head (伺服) 10 9 θ轴 L3 Head…
Rev1.00c
机械控制参数
4-32
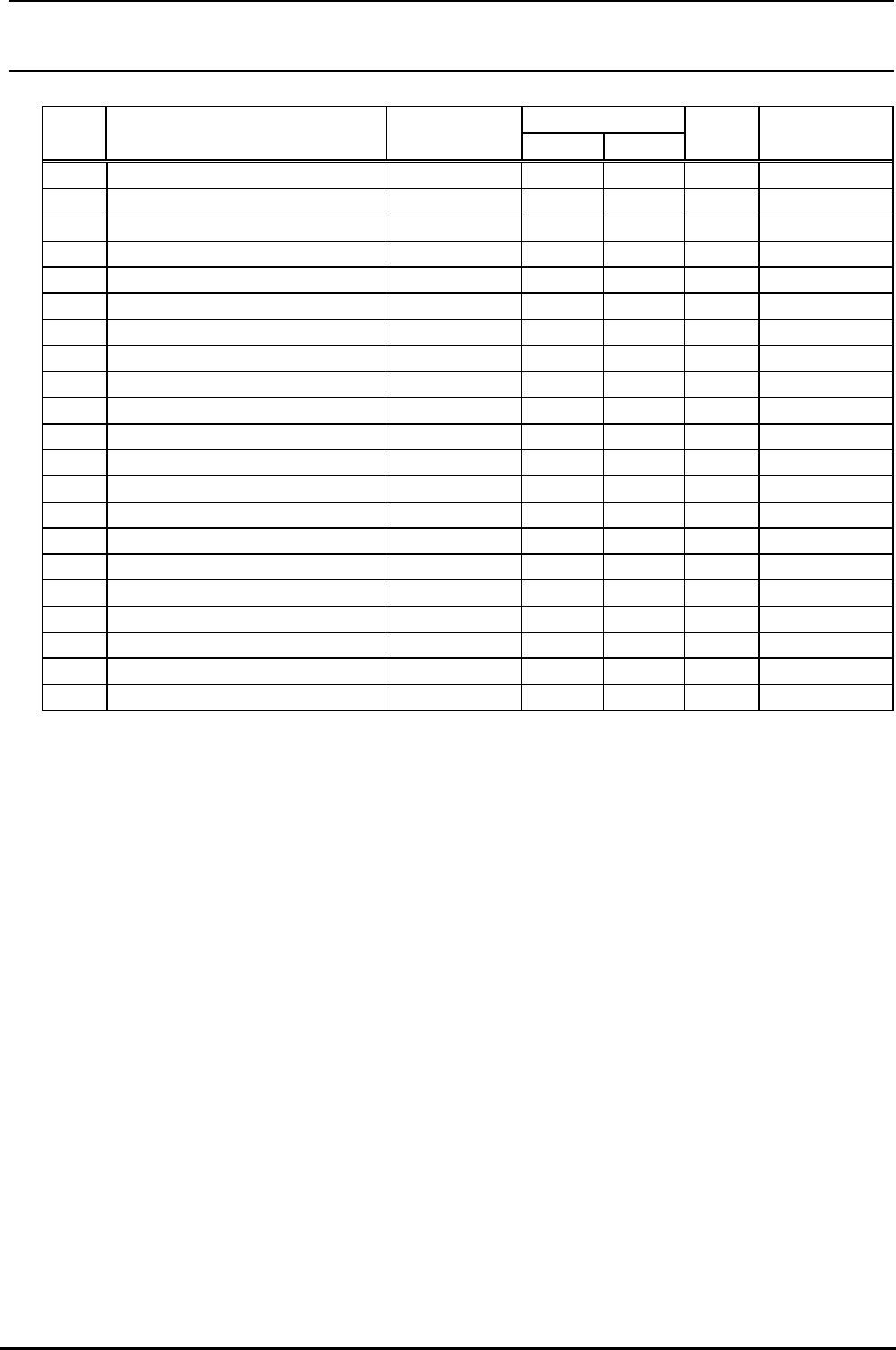
输入范围
№ 项目 简称
最小值 最大值
单位 备考
237 软件动态制动器动作时间 DBT Pr.No 01EB
238 厂商设置用 Pr.No 01EC
239 厂商设置用 Pr.No 01ED
240 厂商设置用 Pr.No 01EE
241 厂商设置用 Pr.No 01EF
242 厂商设置用 Pr.No 01E0
243 厂商设置用 Pr.No 01E1
244 厂商设置用 Pr.No 01E2
245 厂商设置用 Pr.No 01E3
246 厂商设置用 Pr.No 01E4
247 厂商设置用 Pr.No 01E5
248 厂商设置用 Pr.No 01E6
249 厂商设置用 Pr.No 01E7
250 厂商设置用 Pr.No 01E8
251 厂商设置用 Pr.No 01E9
252 厂商设置用 Pr.No 01EA
253 厂商设置用 Pr.No 01EB
254 厂商设置用 Pr.No 01EC
255 厂商设置用 Pr.No 01ED
256 厂商设置用 Pr.No 01EE
257 厂商设置用 Pr.No 01EF
Rev1.00c
机械控制参数
4-33
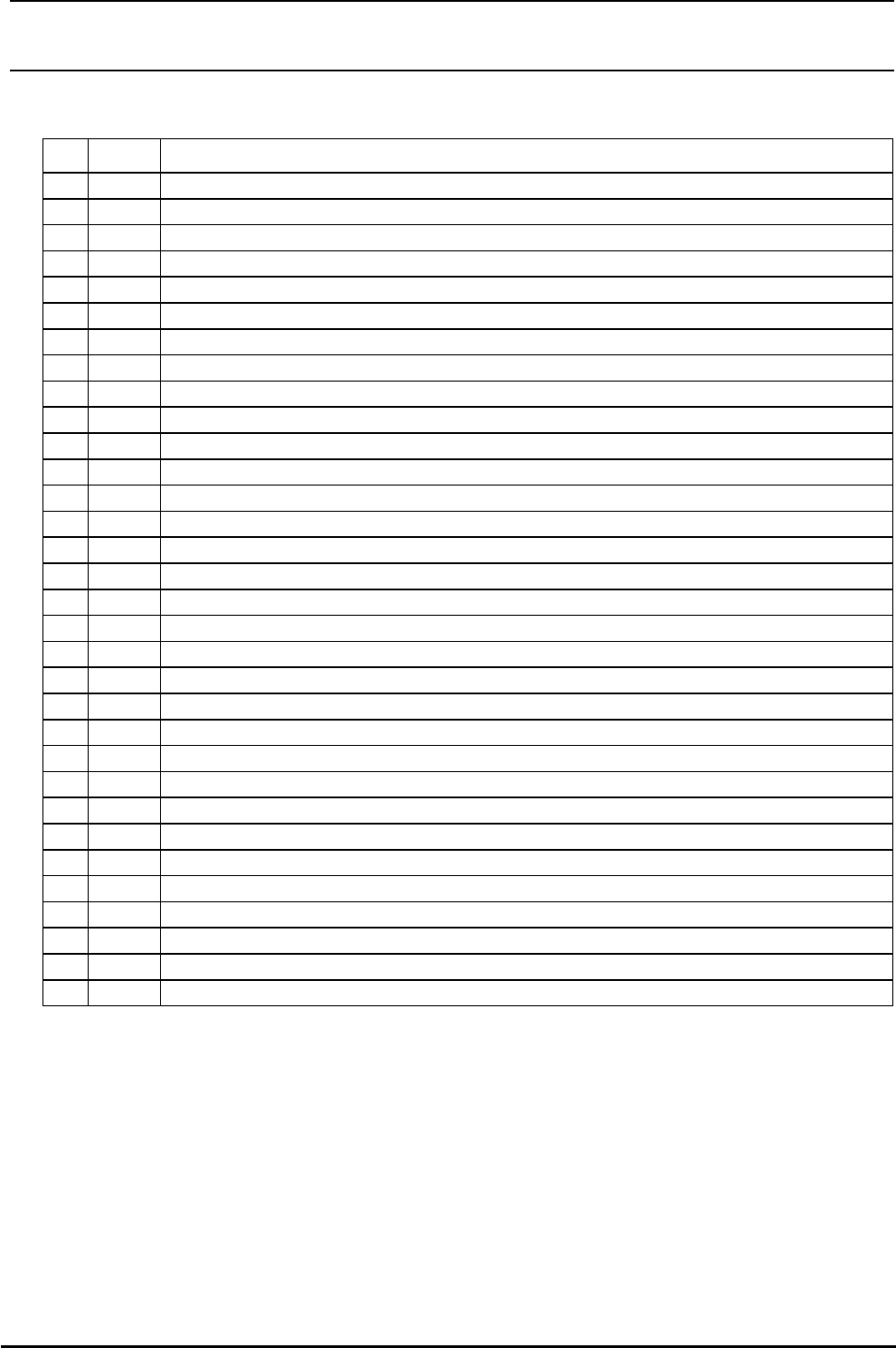
(3)设定
№ 区分 内 容
1 0 Y 轴左侧 (伺服)
2 1 Y 轴右侧 (伺服)
3 2 X 轴左侧 (线性)
4 3 X 轴右侧 (线性)
5 4 Z 轴 L1 Head (伺服)
6 5 θ轴 L1 Head (伺服)
7 6 Z 轴 L2 Head (伺服)
8 7 θ轴 L2 Head (伺服)
9 8 Z 轴 L3 Head (伺服)
10 9 θ轴 L3 Head (伺服)
11 10 Z 轴 L4 Head (伺服)
12 11 θ轴 L4 Head (伺服)
13 12 Z 轴 L5 Head (伺服)
14 13 θ轴 L5 Head (伺服)
15 14 Z 轴 L6 Head (伺服)
16 15 θ轴 L6 Head (伺服)
17 16 Z 轴 IC Head (伺服)
18 17 θ轴 IC Head (伺服)
19 18 预备
20 19 预备
21 20 预备
22 21 预备
23 22 预备
24 23 预备
25 24 预备
26 25 预备
27 26 预备
28 27 预备
29 28 预备
30 29 预备
31 30 预备
32 31 预备
Rev1.00c
机械控制参数
4-34
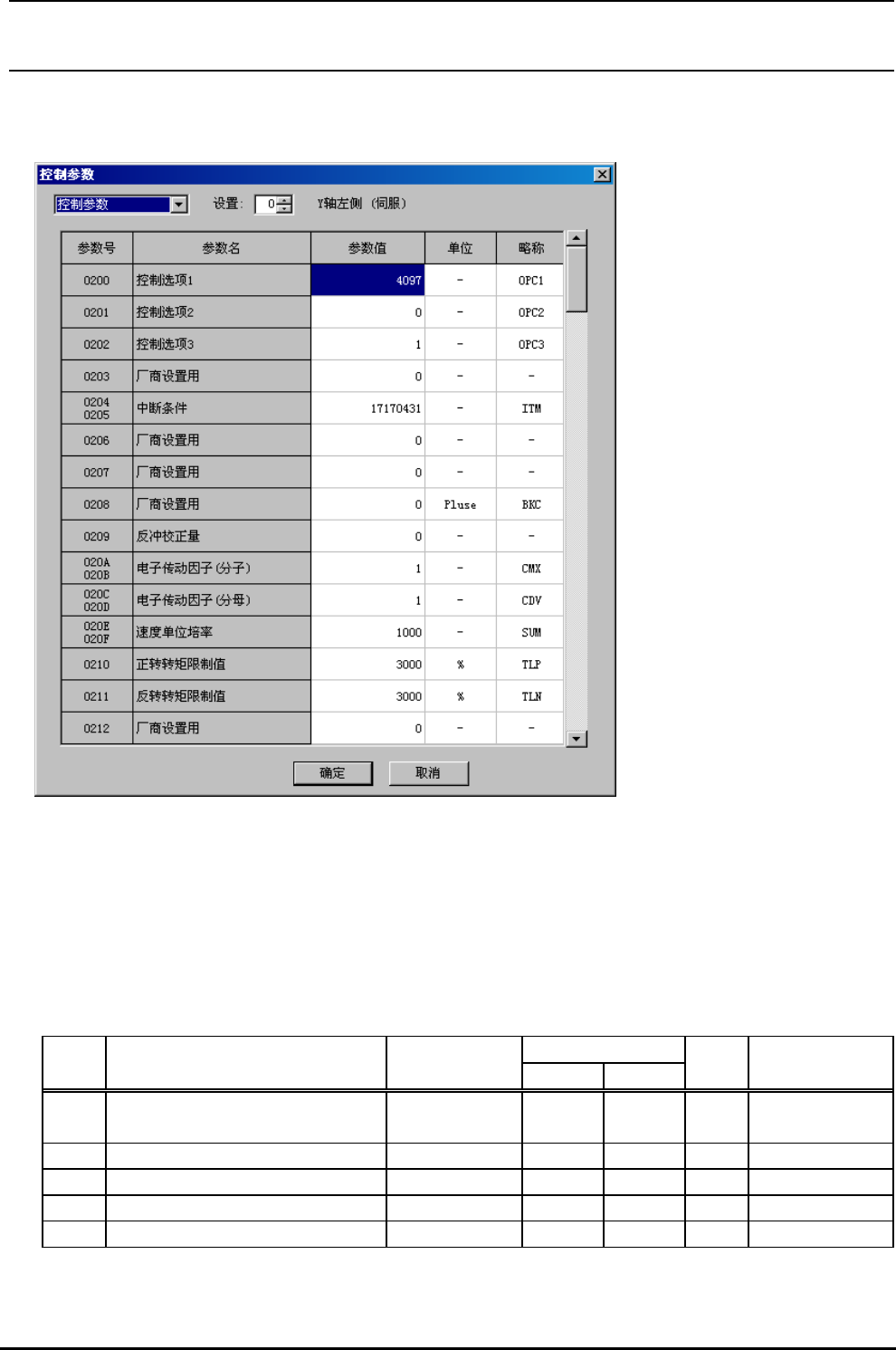
4-2-9 控制参数
图4-2-9 控制参数
(1)设定画面的显示方法
菜单∶ [输入]→[XY]→[控制参数]→[控制参数]
起动∶ [XY]按键→[控制参数]标标→[控制参数]按键
(2)设定项目(控制参数)
输入范围
№ 项目 简称
最小值 最大值
单位 备考
1 设置 0 31
参照伺服参数
(5)设置
2 控制选项 1 OPC1 Pr.No 0200
3 控制选项 2 OPC2 Pr.No 0201
4 控制选项 3 OPC3 Pr.No 0202
5 厂商设置用 Pr.No 0203